 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmniPose6D: Towards Short-Term Object Pose Tracking in Dynamic Scenes from Monocular RGB
Oct 09, 2024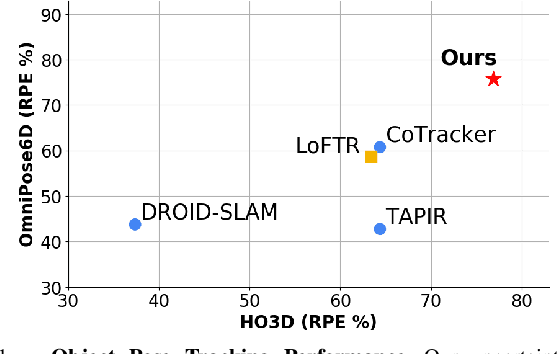
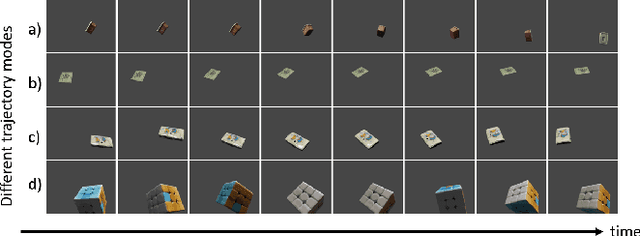
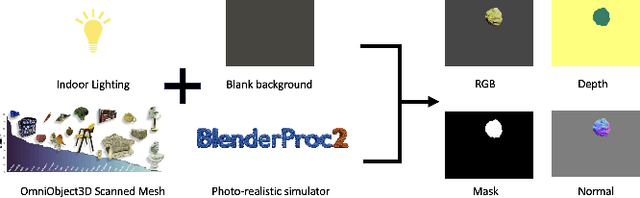
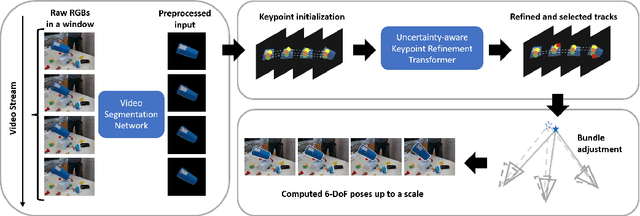
To address the challenge of short-term object pose tracking in dynamic environments with monocular RGB input, we introduce a large-scale synthetic dataset OmniPose6D, crafted to mirror the diversity of real-world conditions. We additionally present a benchmarking framework for a comprehensive comparison of pose tracking algorithms. We propose a pipeline featuring an uncertainty-aware keypoint refinement network, employing probabilistic modeling to refine pose estimation. Comparative evaluations demonstrate that our approach achieves performance superior to existing baselines on real datasets, underscoring the effectiveness of our synthetic dataset and refinement technique in enhancing tracking precision in dynamic contexts. Our contributions set a new precedent for the development and assessment of object pose tracking methodologies in complex scenes.
EgoTracks: A Long-term Egocentric Visual Object Tracking Dataset
Jan 11, 2023



Visual object tracking is a key component to many egocentric vision problems. However, the full spectrum of challenges of egocentric tracking faced by an embodied AI is underrepresented in many existing datasets; these tend to focus on relatively short, third-person videos. Egocentric video has several distinguishing characteristics from those commonly found in past datasets: frequent large camera motions and hand interactions with objects commonly lead to occlusions or objects exiting the frame, and object appearance can change rapidly due to widely different points of view, scale, or object states. Embodied tracking is also naturally long-term, and being able to consistently (re-)associate objects to their appearances and disappearances over as long as a lifetime is critical. Previous datasets under-emphasize this re-detection problem, and their "framed" nature has led to adoption of various spatiotemporal priors that we find do not necessarily generalize to egocentric video. We thus introduce EgoTracks, a new dataset for long-term egocentric visual object tracking. Sourced from the Ego4D dataset, this new dataset presents a significant challenge to recent state-of-the-art single-object tracking models, which we find score poorly on traditional tracking metrics for our new dataset, compared to popular benchmarks. We further show improvements that can be made to a STARK tracker to significantly increase its performance on egocentric data, resulting in a baseline model we call EgoSTARK. We publicly release our annotations and benchmark, hoping our dataset leads to further advancements in tracking.
Meta-Learned Attribute Self-Gating for Continual Generalized Zero-Shot Learning
Feb 23, 2021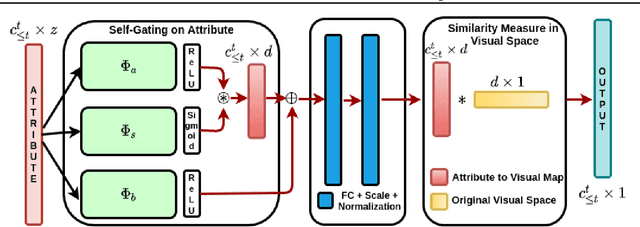
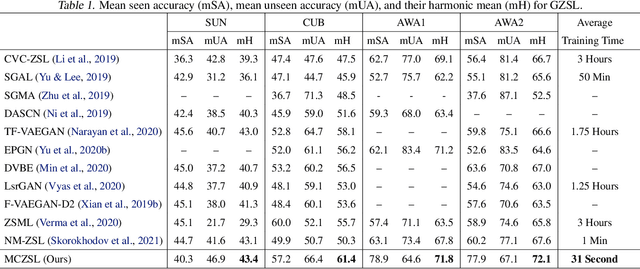
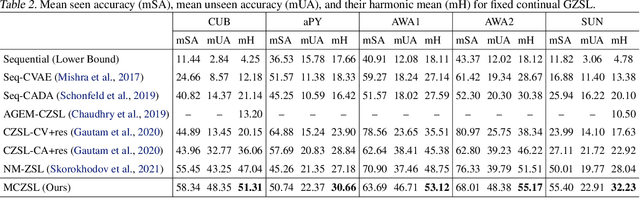
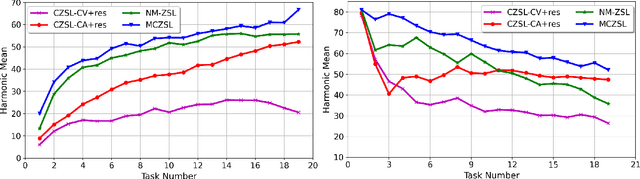
Zero-shot learning (ZSL) has been shown to be a promising approach to generalizing a model to categories unseen during training by leveraging class attributes, but challenges still remain. Recently, methods using generative models to combat bias towards classes seen during training have pushed the state of the art of ZSL, but these generative models can be slow or computationally expensive to train. Additionally, while many previous ZSL methods assume a one-time adaptation to unseen classes, in reality, the world is always changing, necessitating a constant adjustment for deployed models. Models unprepared to handle a sequential stream of data are likely to experience catastrophic forgetting. We propose a meta-continual zero-shot learning (MCZSL) approach to address both these issues. In particular, by pairing self-gating of attributes and scaled class normalization with meta-learning based training, we are able to outperform state-of-the-art results while being able to train our models substantially faster ($>100\times$) than expensive generative-based approaches. We demonstrate this by performing experiments on five standard ZSL datasets (CUB, aPY, AWA1, AWA2 and SUN) in both generalized zero-shot learning and generalized continual zero-shot learning settings.