 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-driven SLAM Benchmarking
Paper and Code
Sep 25, 2024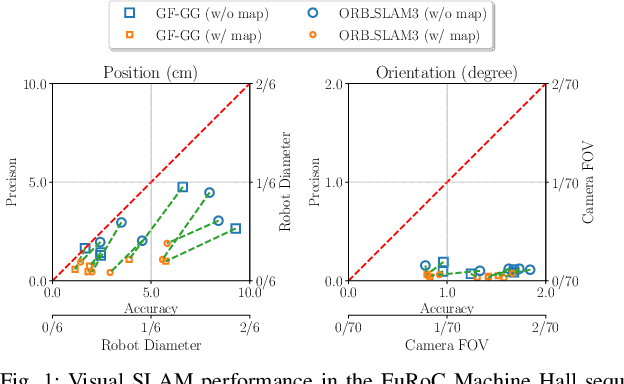
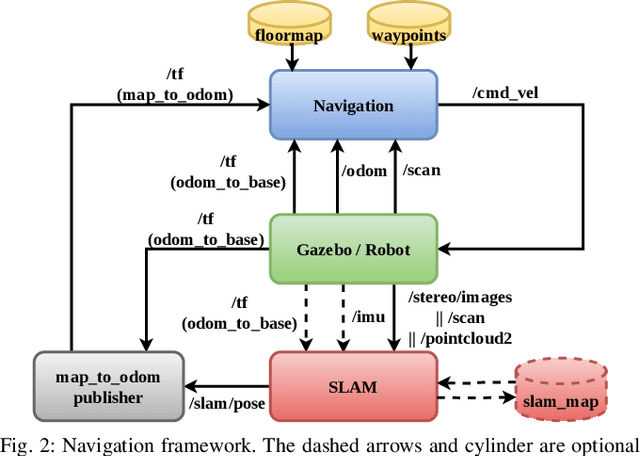
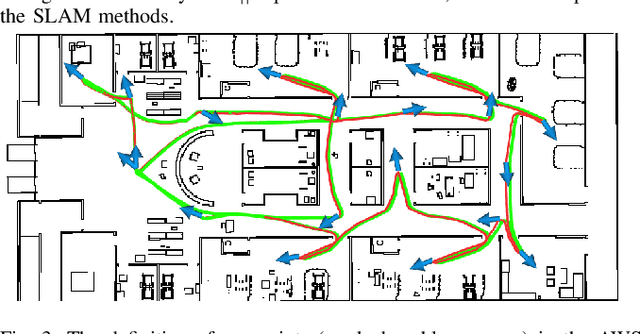
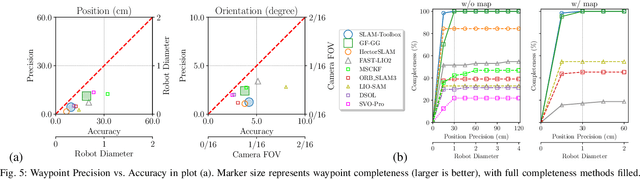
For assistive robots, one critical use case of SLAM is to support localization as they navigate through an environment completing tasks. Current SLAM benchmarks do not consider task-based deployments where repeatability (precision) is more critical than accuracy. To address this gap, we propose a task-driven benchmarking framework for evaluating SLAM methods. The framework accounts for SLAM's mapping capabilities, employs precision as a key metric, and has low resource requirements to implement. Testing of state-of-the-art SLAM methods in both simulated and real-world scenarios provides insights into the performance properties of modern SLAM solutions. In particular, it shows that passive stereo SLAM operates at a level of precision comparable to LiDAR-based SLAM in typical indoor environments. The benchmarking approach offers a more relevant and accurate assessment of SLAM performance in task-driven applications.