 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafer Gap: A Gap-based Local Planner for Safe Navigation with Nonholonomic Mobile Robots
Mar 14, 2023This paper extends the gap-based navigation technique in Potential Gap by guaranteeing safety for nonholonomic robots for all tiers of the local planner hierarchy, so called Safer Gap. The first tier generates a Bezier-based collision-free path through gaps. A subset of navigable free-space from the robot through a gap, called the keyhole, is defined to be the union of the largest collision-free disc centered on the robot and a trapezoidal region directed through the gap. It is encoded by a shallow neural network zeroing barrier function (ZBF). Nonlinear model predictive control (NMPC), with Keyhole ZBF constraints and output tracking of the Bezier path, synthesizes a safe kinematically-feasible trajectory. Low-level use of the Keyhole ZBF within a point-wise optimization-based safe control synthesis module serves as a final safety layer. Simulation and experimental validation of Safer Gap confirm its collision-free navigation properties.
Geometry of Radial Basis Neural Networks for Safety Biased Approximation of Unsafe Regions
Oct 11, 2022
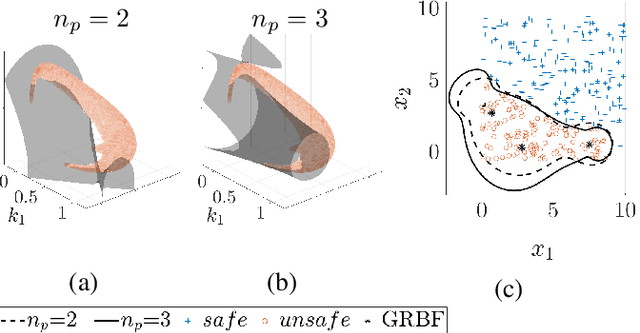
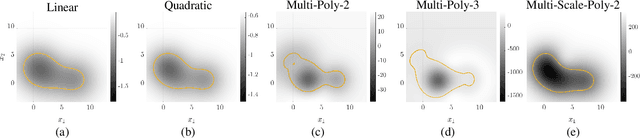

Barrier function-based inequality constraints are a means to enforce safety specifications for control systems. When used in conjunction with a convex optimization program, they provide a computationally efficient method to enforce safety for the general class of control-affine systems. One of the main assumptions when taking this approach is the a priori knowledge of the barrier function itself, i.e., knowledge of the safe set. In the context of navigation through unknown environments where the locally safe set evolves with time, such knowledge does not exist. This manuscript focuses on the synthesis of a zeroing barrier function characterizing the safe set based on safe and unsafe sample measurements, e.g., from perception data in navigation applications. Prior work formulated a supervised machine learning algorithm whose solution guaranteed the construction of a zeroing barrier function with specific level-set properties. However, it did not explore the geometry of the neural network design used for the synthesis process. This manuscript describes the specific geometry of the neural network used for zeroing barrier function synthesis, and shows how the network provides the necessary representation for splitting the state space into safe and unsafe regions.