 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-agent cooperation through in-context co-player inference
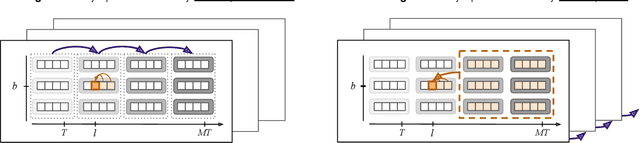
Feb 18, 2026Achieving cooperation among self-interested agents remains a fundamental challenge in multi-agent reinforcement learning. Recent work showed that mutual cooperation can be induced between "learning-aware" agents that account for and shape the learning dynamics of their co-players. However, existing approaches typically rely on hardcoded, often inconsistent, assumptions about co-player learning rules or enforce a strict separation between "naive learners" updating on fast timescales and "meta-learners" observing these updates. Here, we demonstrate that the in-context learning capabilities of sequence models allow for co-player learning awareness without requiring hardcoded assumptions or explicit timescale separation. We show that training sequence model agents against a diverse distribution of co-players naturally induces in-context best-response strategies, effectively functioning as learning algorithms on the fast intra-episode timescale. We find that the cooperative mechanism identified in prior work-where vulnerability to extortion drives mutual shaping-emerges naturally in this setting: in-context adaptation renders agents vulnerable to extortion, and the resulting mutual pressure to shape the opponent's in-context learning dynamics resolves into the learning of cooperative behavior. Our results suggest that standard decentralized reinforcement learning on sequence models combined with co-player diversity provides a scalable path to learning cooperative behaviors.
Emergent temporal abstractions in autoregressive models enable hierarchical reinforcement learning
Dec 24, 2025Large-scale autoregressive models pretrained on next-token prediction and finetuned with reinforcement learning (RL) have achieved unprecedented success on many problem domains. During RL, these models explore by generating new outputs, one token at a time. However, sampling actions token-by-token can result in highly inefficient learning, particularly when rewards are sparse. Here, we show that it is possible to overcome this problem by acting and exploring within the internal representations of an autoregressive model. Specifically, to discover temporally-abstract actions, we introduce a higher-order, non-causal sequence model whose outputs control the residual stream activations of a base autoregressive model. On grid world and MuJoCo-based tasks with hierarchical structure, we find that the higher-order model learns to compress long activation sequence chunks onto internal controllers. Critically, each controller executes a sequence of behaviorally meaningful actions that unfold over long timescales and are accompanied with a learned termination condition, such that composing multiple controllers over time leads to efficient exploration on novel tasks. We show that direct internal controller reinforcement, a process we term "internal RL", enables learning from sparse rewards in cases where standard RL finetuning fails. Our results demonstrate the benefits of latent action generation and reinforcement in autoregressive models, suggesting internal RL as a promising avenue for realizing hierarchical RL within foundation models.
MesaNet: Sequence Modeling by Locally Optimal Test-Time Training
Jun 05, 2025Sequence modeling is currently dominated by causal transformer architectures that use softmax self-attention. Although widely adopted, transformers require scaling memory and compute linearly during inference. A recent stream of work linearized the softmax operation, resulting in powerful recurrent neural network (RNN) models with constant memory and compute costs such as DeltaNet, Mamba or xLSTM. These models can be unified by noting that their recurrent layer dynamics can all be derived from an in-context regression objective, approximately optimized through an online learning rule. Here, we join this line of work and introduce a numerically stable, chunkwise parallelizable version of the recently proposed Mesa layer (von Oswald et al., 2024), and study it in language modeling at the billion-parameter scale. This layer again stems from an in-context loss, but which is now minimized to optimality at every time point using a fast conjugate gradient solver. Through an extensive suite of experiments, we show that optimal test-time training enables reaching lower language modeling perplexity and higher downstream benchmark performance than previous RNNs, especially on tasks requiring long context understanding. This performance gain comes at the cost of additional flops spent during inference time. Our results are therefore intriguingly related to recent trends of increasing test-time compute to improve performance -- here by spending compute to solve sequential optimization problems within the neural network itself.
Multi-agent cooperation through learning-aware policy gradients
Oct 24, 2024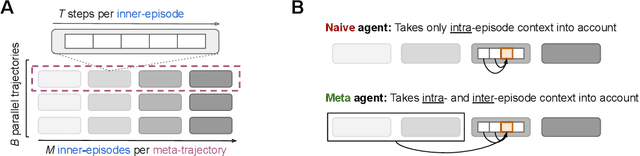

Self-interested individuals often fail to cooperate, posing a fundamental challenge for multi-agent learning. How can we achieve cooperation among self-interested, independent learning agents? Promising recent work has shown that in certain tasks cooperation can be established between learning-aware agents who model the learning dynamics of each other. Here, we present the first unbiased, higher-derivative-free policy gradient algorithm for learning-aware reinforcement learning, which takes into account that other agents are themselves learning through trial and error based on multiple noisy trials. We then leverage efficient sequence models to condition behavior on long observation histories that contain traces of the learning dynamics of other agents. Training long-context policies with our algorithm leads to cooperative behavior and high returns on standard social dilemmas, including a challenging environment where temporally-extended action coordination is required. Finally, we derive from the iterated prisoner's dilemma a novel explanation for how and when cooperation arises among self-interested learning-aware agents.
Structured Entity Extraction Using Large Language Models
Feb 06, 2024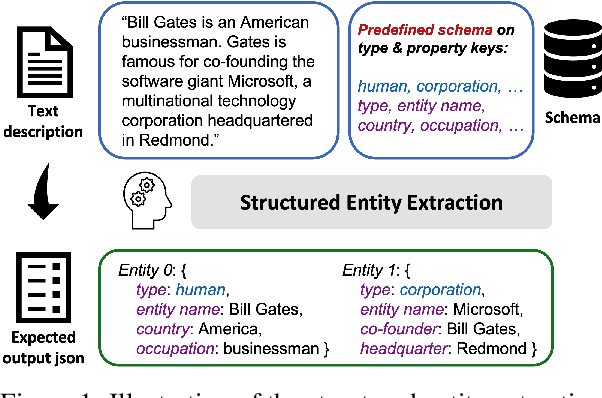

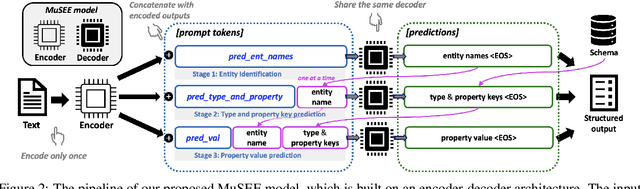

Recent advances in machine learning have significantly impacted the field of information extraction, with Large Language Models (LLMs) playing a pivotal role in extracting structured information from unstructured text. This paper explores the challenges and limitations of current methodologies in structured entity extraction and introduces a novel approach to address these issues. We contribute to the field by first introducing and formalizing the task of Structured Entity Extraction (SEE), followed by proposing Approximate Entity Set OverlaP (AESOP) Metric designed to appropriately assess model performance on this task. Later, we propose a new model that harnesses the power of LLMs for enhanced effectiveness and efficiency through decomposing the entire extraction task into multiple stages. Quantitative evaluation and human side-by-side evaluation confirm that our model outperforms baselines, offering promising directions for future advancements in structured entity extraction.
Would I have gotten that reward? Long-term credit assignment by counterfactual contribution analysis
Jun 29, 2023



To make reinforcement learning more sample efficient, we need better credit assignment methods that measure an action's influence on future rewards. Building upon Hindsight Credit Assignment (HCA), we introduce Counterfactual Contribution Analysis (COCOA), a new family of model-based credit assignment algorithms. Our algorithms achieve precise credit assignment by measuring the contribution of actions upon obtaining subsequent rewards, by quantifying a counterfactual query: "Would the agent still have reached this reward if it had taken another action?". We show that measuring contributions w.r.t. rewarding states, as is done in HCA, results in spurious estimates of contributions, causing HCA to degrade towards the high-variance REINFORCE estimator in many relevant environments. Instead, we measure contributions w.r.t. rewards or learned representations of the rewarding objects, resulting in gradient estimates with lower variance. We run experiments on a suite of problems specifically designed to evaluate long-term credit assignment capabilities. By using dynamic programming, we measure ground-truth policy gradients and show that the improved performance of our new model-based credit assignment methods is due to lower bias and variance compared to HCA and common baselines. Our results demonstrate how modeling action contributions towards rewarding outcomes can be leveraged for credit assignment, opening a new path towards sample-efficient reinforcement learning.
The least-control principle for learning at equilibrium
Jul 04, 2022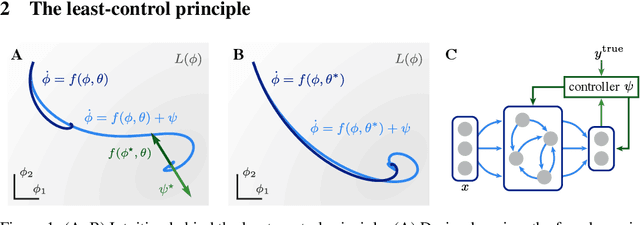
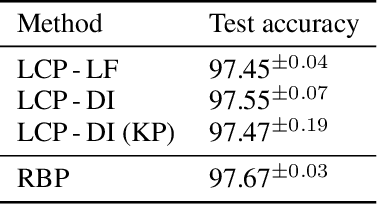
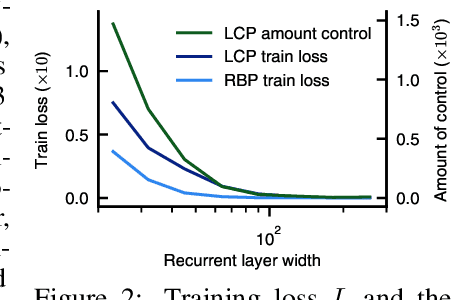
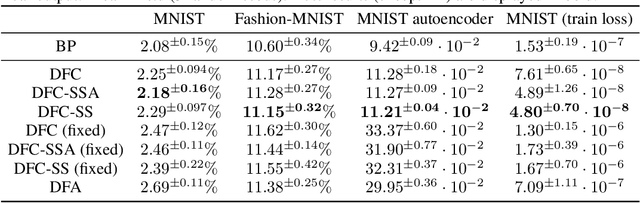
Equilibrium systems are a powerful way to express neural computations. As special cases, they include models of great current interest in both neuroscience and machine learning, such as equilibrium recurrent neural networks, deep equilibrium models, or meta-learning. Here, we present a new principle for learning such systems with a temporally- and spatially-local rule. Our principle casts learning as a least-control problem, where we first introduce an optimal controller to lead the system towards a solution state, and then define learning as reducing the amount of control needed to reach such a state. We show that incorporating learning signals within a dynamics as an optimal control enables transmitting credit assignment information in previously unknown ways, avoids storing intermediate states in memory, and does not rely on infinitesimal learning signals. In practice, our principle leads to strong performance matching that of leading gradient-based learning methods when applied to an array of problems involving recurrent neural networks and meta-learning. Our results shed light on how the brain might learn and offer new ways of approaching a broad class of machine learning problems.
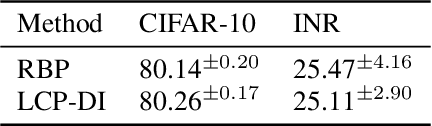
Minimizing Control for Credit Assignment with Strong Feedback
Apr 14, 2022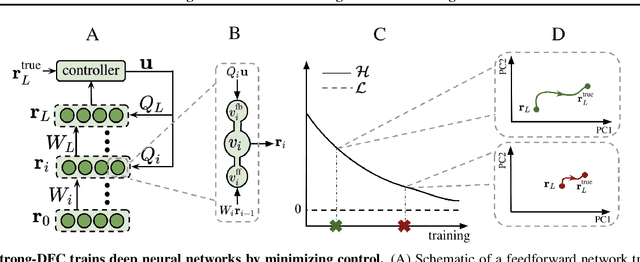
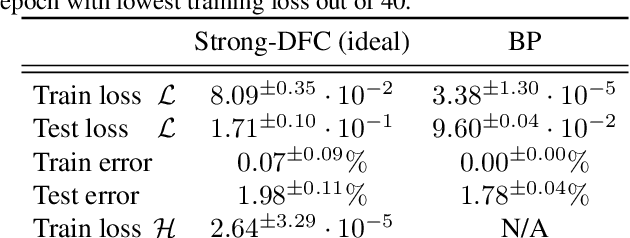
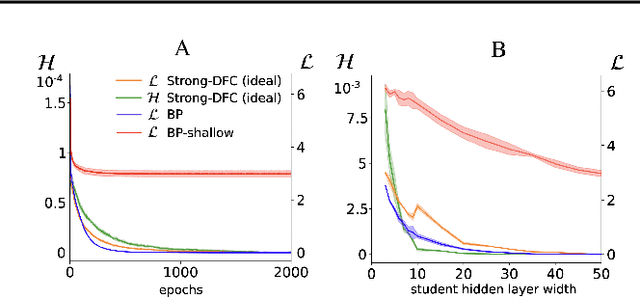
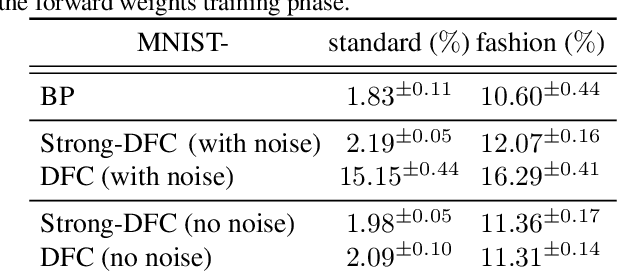
The success of deep learning attracted interest in whether the brain learns hierarchical representations using gradient-based learning. However, current biologically plausible methods for gradient-based credit assignment in deep neural networks need infinitesimally small feedback signals, which is problematic in biologically realistic noisy environments and at odds with experimental evidence in neuroscience showing that top-down feedback can significantly influence neural activity. Building upon deep feedback control (DFC), a recently proposed credit assignment method, we combine strong feedback influences on neural activity with gradient-based learning and show that this naturally leads to a novel view on neural network optimization. Instead of gradually changing the network weights towards configurations with low output loss, weight updates gradually minimize the amount of feedback required from a controller that drives the network to the supervised output label. Moreover, we show that the use of strong feedback in DFC allows learning forward and feedback connections simultaneously, using a learning rule fully local in space and time. We complement our theoretical results with experiments on standard computer-vision benchmarks, showing competitive performance to backpropagation as well as robustness to noise. Overall, our work presents a fundamentally novel view of learning as control minimization, while sidestepping biologically unrealistic assumptions.
Credit Assignment in Neural Networks through Deep Feedback Control
Jun 15, 2021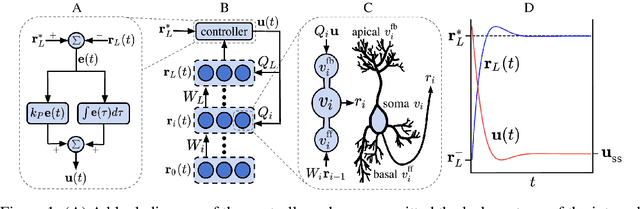
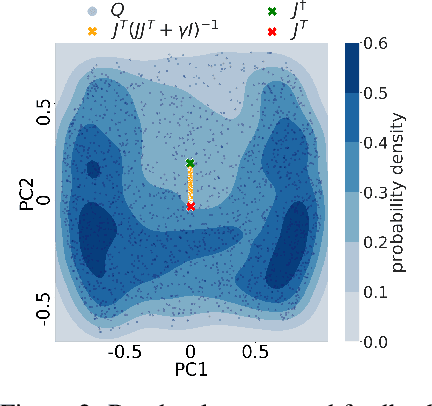
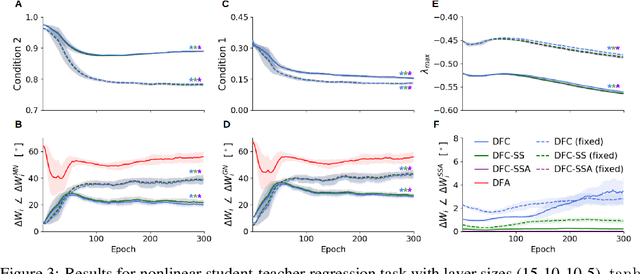
The success of deep learning sparked interest in whether the brain learns by using similar techniques for assigning credit to each synaptic weight for its contribution to the network output. However, the majority of current attempts at biologically-plausible learning methods are either non-local in time, require highly specific connectivity motives, or have no clear link to any known mathematical optimization method. Here, we introduce Deep Feedback Control (DFC), a new learning method that uses a feedback controller to drive a deep neural network to match a desired output target and whose control signal can be used for credit assignment. The resulting learning rule is fully local in space and time and approximates Gauss-Newton optimization for a wide range of feedback connectivity patterns. To further underline its biological plausibility, we relate DFC to a multi-compartment model of cortical pyramidal neurons with a local voltage-dependent synaptic plasticity rule, consistent with recent theories of dendritic processing. By combining dynamical system theory with mathematical optimization theory, we provide a strong theoretical foundation for DFC that we corroborate with detailed results on toy experiments and standard computer-vision benchmarks.
Challenges for Using Impact Regularizers to Avoid Negative Side Effects
Feb 23, 2021Designing reward functions for reinforcement learning is difficult: besides specifying which behavior is rewarded for a task, the reward also has to discourage undesired outcomes. Misspecified reward functions can lead to unintended negative side effects, and overall unsafe behavior. To overcome this problem, recent work proposed to augment the specified reward function with an impact regularizer that discourages behavior that has a big impact on the environment. Although initial results with impact regularizers seem promising in mitigating some types of side effects, important challenges remain. In this paper, we examine the main current challenges of impact regularizers and relate them to fundamental design decisions. We discuss in detail which challenges recent approaches address and which remain unsolved. Finally, we explore promising directions to overcome the unsolved challenges in preventing negative side effects with impact regularizers.