 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmergent temporal abstractions in autoregressive models enable hierarchical reinforcement learning
Dec 24, 2025Large-scale autoregressive models pretrained on next-token prediction and finetuned with reinforcement learning (RL) have achieved unprecedented success on many problem domains. During RL, these models explore by generating new outputs, one token at a time. However, sampling actions token-by-token can result in highly inefficient learning, particularly when rewards are sparse. Here, we show that it is possible to overcome this problem by acting and exploring within the internal representations of an autoregressive model. Specifically, to discover temporally-abstract actions, we introduce a higher-order, non-causal sequence model whose outputs control the residual stream activations of a base autoregressive model. On grid world and MuJoCo-based tasks with hierarchical structure, we find that the higher-order model learns to compress long activation sequence chunks onto internal controllers. Critically, each controller executes a sequence of behaviorally meaningful actions that unfold over long timescales and are accompanied with a learned termination condition, such that composing multiple controllers over time leads to efficient exploration on novel tasks. We show that direct internal controller reinforcement, a process we term "internal RL", enables learning from sparse rewards in cases where standard RL finetuning fails. Our results demonstrate the benefits of latent action generation and reinforcement in autoregressive models, suggesting internal RL as a promising avenue for realizing hierarchical RL within foundation models.
MesaNet: Sequence Modeling by Locally Optimal Test-Time Training
Jun 05, 2025Sequence modeling is currently dominated by causal transformer architectures that use softmax self-attention. Although widely adopted, transformers require scaling memory and compute linearly during inference. A recent stream of work linearized the softmax operation, resulting in powerful recurrent neural network (RNN) models with constant memory and compute costs such as DeltaNet, Mamba or xLSTM. These models can be unified by noting that their recurrent layer dynamics can all be derived from an in-context regression objective, approximately optimized through an online learning rule. Here, we join this line of work and introduce a numerically stable, chunkwise parallelizable version of the recently proposed Mesa layer (von Oswald et al., 2024), and study it in language modeling at the billion-parameter scale. This layer again stems from an in-context loss, but which is now minimized to optimality at every time point using a fast conjugate gradient solver. Through an extensive suite of experiments, we show that optimal test-time training enables reaching lower language modeling perplexity and higher downstream benchmark performance than previous RNNs, especially on tasks requiring long context understanding. This performance gain comes at the cost of additional flops spent during inference time. Our results are therefore intriguingly related to recent trends of increasing test-time compute to improve performance -- here by spending compute to solve sequential optimization problems within the neural network itself.
Weight decay induces low-rank attention layers
Oct 31, 2024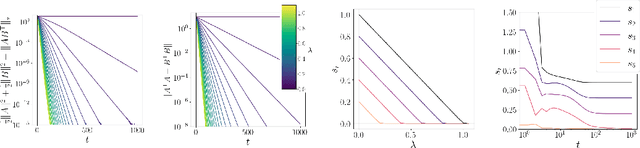
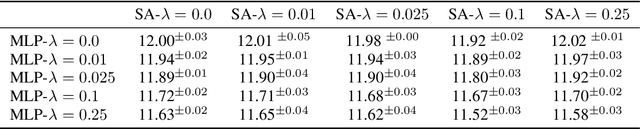
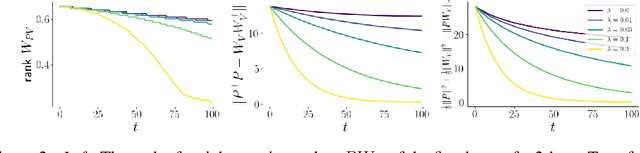
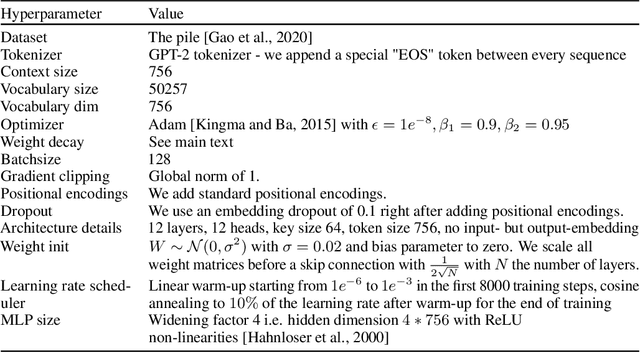
The effect of regularizers such as weight decay when training deep neural networks is not well understood. We study the influence of weight decay as well as $L2$-regularization when training neural network models in which parameter matrices interact multiplicatively. This combination is of particular interest as this parametrization is common in attention layers, the workhorse of transformers. Here, key-query, as well as value-projection parameter matrices, are multiplied directly with each other: $W_K^TW_Q$ and $PW_V$. We extend previous results and show on one hand that any local minimum of a $L2$-regularized loss of the form $L(AB^\top) + \lambda (\|A\|^2 + \|B\|^2)$ coincides with a minimum of the nuclear norm-regularized loss $L(AB^\top) + \lambda\|AB^\top\|_*$, and on the other hand that the 2 losses become identical exponentially quickly during training. We thus complement existing works linking $L2$-regularization with low-rank regularization, and in particular, explain why such regularization on the matrix product affects early stages of training. Based on these theoretical insights, we verify empirically that the key-query and value-projection matrix products $W_K^TW_Q, PW_V$ within attention layers, when optimized with weight decay, as usually done in vision tasks and language modelling, indeed induce a significant reduction in the rank of $W_K^TW_Q$ and $PW_V$, even in fully online training. We find that, in accordance with existing work, inducing low rank in attention matrix products can damage language model performance, and observe advantages when decoupling weight decay in attention layers from the rest of the parameters.
Multi-agent cooperation through learning-aware policy gradients
Oct 24, 2024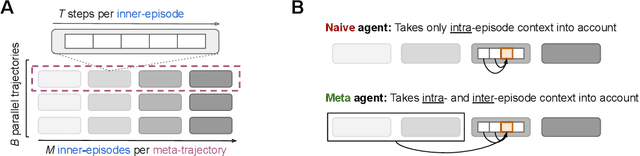
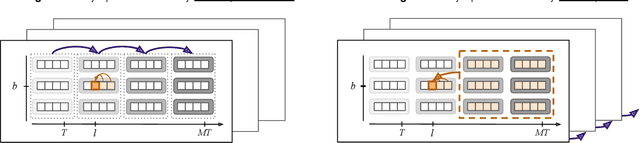
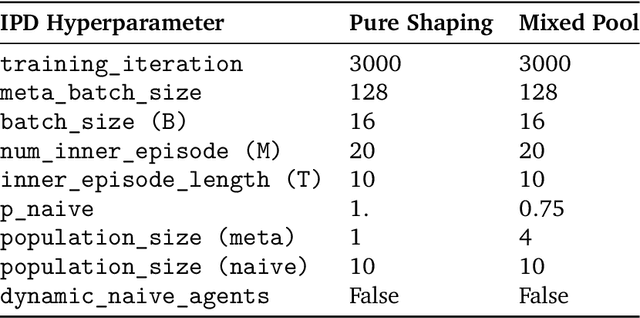

Self-interested individuals often fail to cooperate, posing a fundamental challenge for multi-agent learning. How can we achieve cooperation among self-interested, independent learning agents? Promising recent work has shown that in certain tasks cooperation can be established between learning-aware agents who model the learning dynamics of each other. Here, we present the first unbiased, higher-derivative-free policy gradient algorithm for learning-aware reinforcement learning, which takes into account that other agents are themselves learning through trial and error based on multiple noisy trials. We then leverage efficient sequence models to condition behavior on long observation histories that contain traces of the learning dynamics of other agents. Training long-context policies with our algorithm leads to cooperative behavior and high returns on standard social dilemmas, including a challenging environment where temporally-extended action coordination is required. Finally, we derive from the iterated prisoner's dilemma a novel explanation for how and when cooperation arises among self-interested learning-aware agents.
Learning Randomized Algorithms with Transformers
Aug 20, 2024Randomization is a powerful tool that endows algorithms with remarkable properties. For instance, randomized algorithms excel in adversarial settings, often surpassing the worst-case performance of deterministic algorithms with large margins. Furthermore, their success probability can be amplified by simple strategies such as repetition and majority voting. In this paper, we enhance deep neural networks, in particular transformer models, with randomization. We demonstrate for the first time that randomized algorithms can be instilled in transformers through learning, in a purely data- and objective-driven manner. First, we analyze known adversarial objectives for which randomized algorithms offer a distinct advantage over deterministic ones. We then show that common optimization techniques, such as gradient descent or evolutionary strategies, can effectively learn transformer parameters that make use of the randomness provided to the model. To illustrate the broad applicability of randomization in empowering neural networks, we study three conceptual tasks: associative recall, graph coloring, and agents that explore grid worlds. In addition to demonstrating increased robustness against oblivious adversaries through learned randomization, our experiments reveal remarkable performance improvements due to the inherently random nature of the neural networks' computation and predictions.
When can transformers compositionally generalize in-context?
Jul 17, 2024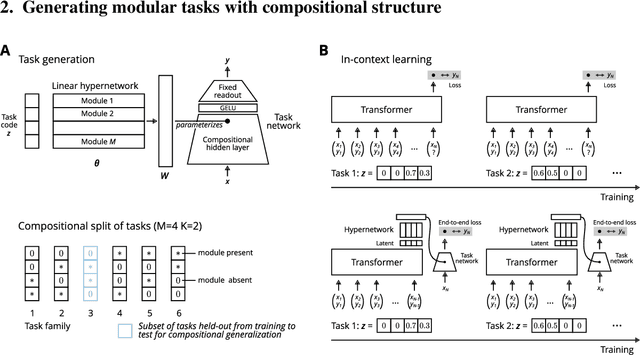
Many tasks can be composed from a few independent components. This gives rise to a combinatorial explosion of possible tasks, only some of which might be encountered during training. Under what circumstances can transformers compositionally generalize from a subset of tasks to all possible combinations of tasks that share similar components? Here we study a modular multitask setting that allows us to precisely control compositional structure in the data generation process. We present evidence that transformers learning in-context struggle to generalize compositionally on this task despite being in principle expressive enough to do so. Compositional generalization becomes possible only when introducing a bottleneck that enforces an explicit separation between task inference and task execution.
Attention as a Hypernetwork
Jun 09, 2024



Transformers can under some circumstances generalize to novel problem instances whose constituent parts might have been encountered during training but whose compositions have not. What mechanisms underlie this ability for compositional generalization? By reformulating multi-head attention as a hypernetwork, we reveal that a low-dimensional latent code specifies key-query specific operations. We find empirically that this latent code is highly structured, capturing information about the subtasks performed by the network. Using the framework of attention as a hypernetwork we further propose a simple modification of multi-head linear attention that strengthens the ability for compositional generalization on a range of abstract reasoning tasks. In particular, we introduce a symbolic version of the Raven Progressive Matrices human intelligence test on which we demonstrate how scaling model size and data enables compositional generalization and gives rise to a functionally structured latent code in the transformer.
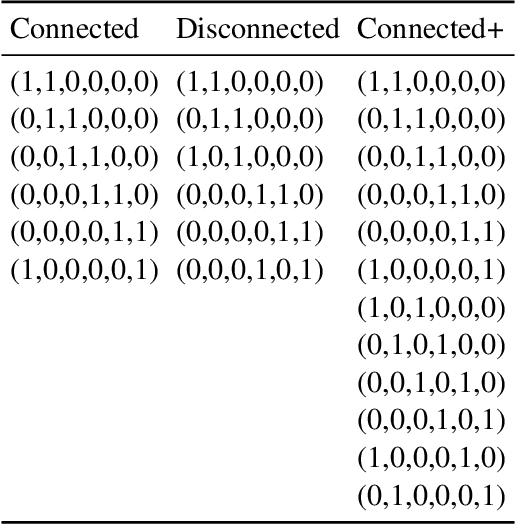
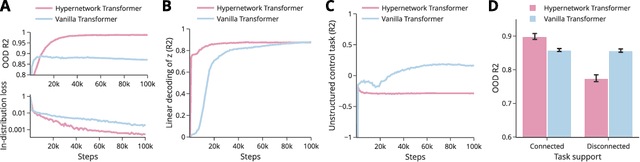
Discovering modular solutions that generalize compositionally
Dec 22, 2023

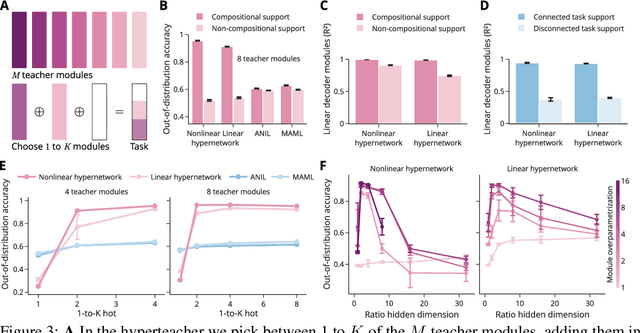
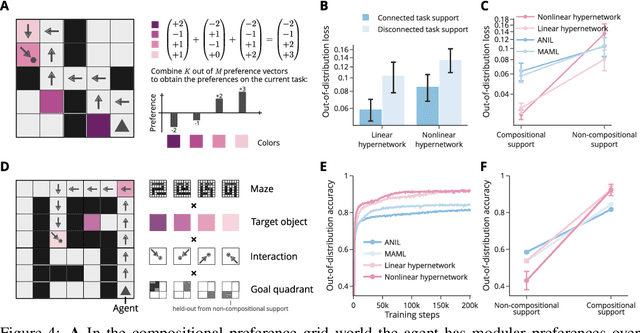
Many complex tasks and environments can be decomposed into simpler, independent parts. Discovering such underlying compositional structure has the potential to expedite adaptation and enable compositional generalization. Despite progress, our most powerful systems struggle to compose flexibly. While most of these systems are monolithic, modularity promises to allow capturing the compositional nature of many tasks. However, it is unclear under which circumstances modular systems discover this hidden compositional structure. To shed light on this question, we study a teacher-student setting with a modular teacher where we have full control over the composition of ground truth modules. This allows us to relate the problem of compositional generalization to that of identification of the underlying modules. We show theoretically that identification up to linear transformation purely from demonstrations is possible in hypernetworks without having to learn an exponential number of module combinations. While our theory assumes the infinite data limit, in an extensive empirical study we demonstrate how meta-learning from finite data can discover modular solutions that generalize compositionally in modular but not monolithic architectures. We further show that our insights translate outside the teacher-student setting and demonstrate that in tasks with compositional preferences and tasks with compositional goals hypernetworks can discover modular policies that compositionally generalize.
Uncovering mesa-optimization algorithms in Transformers
Sep 11, 2023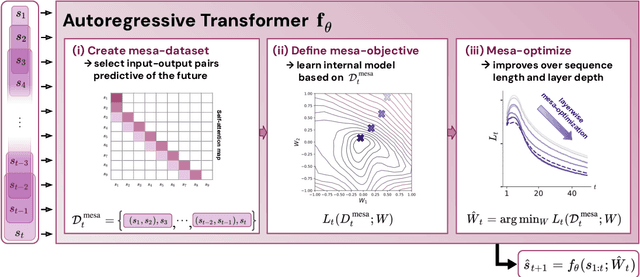
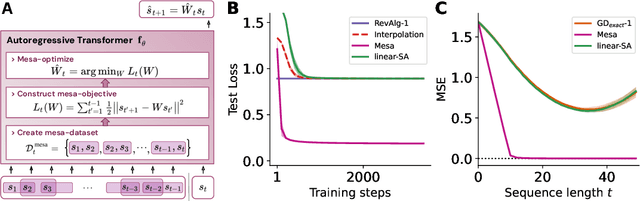
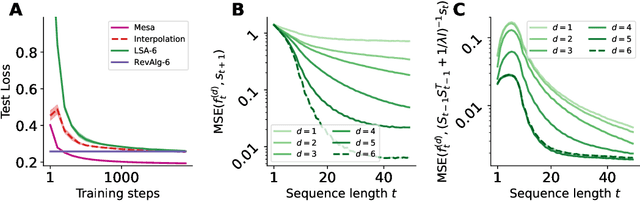
Transformers have become the dominant model in deep learning, but the reason for their superior performance is poorly understood. Here, we hypothesize that the strong performance of Transformers stems from an architectural bias towards mesa-optimization, a learned process running within the forward pass of a model consisting of the following two steps: (i) the construction of an internal learning objective, and (ii) its corresponding solution found through optimization. To test this hypothesis, we reverse-engineer a series of autoregressive Transformers trained on simple sequence modeling tasks, uncovering underlying gradient-based mesa-optimization algorithms driving the generation of predictions. Moreover, we show that the learned forward-pass optimization algorithm can be immediately repurposed to solve supervised few-shot tasks, suggesting that mesa-optimization might underlie the in-context learning capabilities of large language models. Finally, we propose a novel self-attention layer, the mesa-layer, that explicitly and efficiently solves optimization problems specified in context. We find that this layer can lead to improved performance in synthetic and preliminary language modeling experiments, adding weight to our hypothesis that mesa-optimization is an important operation hidden within the weights of trained Transformers.
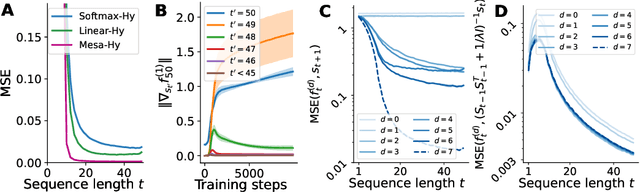
Gated recurrent neural networks discover attention
Sep 04, 2023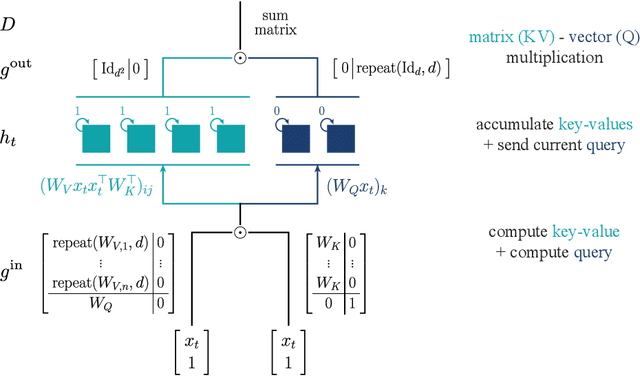

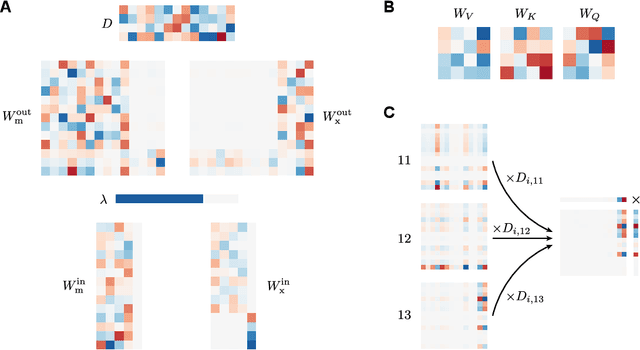
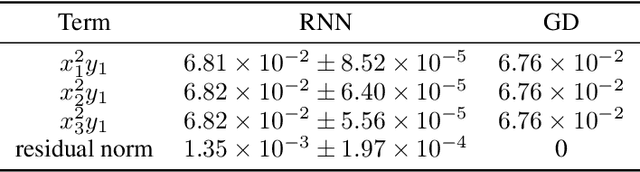
Recent architectural developments have enabled recurrent neural networks (RNNs) to reach and even surpass the performance of Transformers on certain sequence modeling tasks. These modern RNNs feature a prominent design pattern: linear recurrent layers interconnected by feedforward paths with multiplicative gating. Here, we show how RNNs equipped with these two design elements can exactly implement (linear) self-attention, the main building block of Transformers. By reverse-engineering a set of trained RNNs, we find that gradient descent in practice discovers our construction. In particular, we examine RNNs trained to solve simple in-context learning tasks on which Transformers are known to excel and find that gradient descent instills in our RNNs the same attention-based in-context learning algorithm used by Transformers. Our findings highlight the importance of multiplicative interactions in neural networks and suggest that certain RNNs might be unexpectedly implementing attention under the hood.