 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLatent Diffusion : Multi-Dimension Stable Diffusion Latent Space Explorer
Sep 26, 2025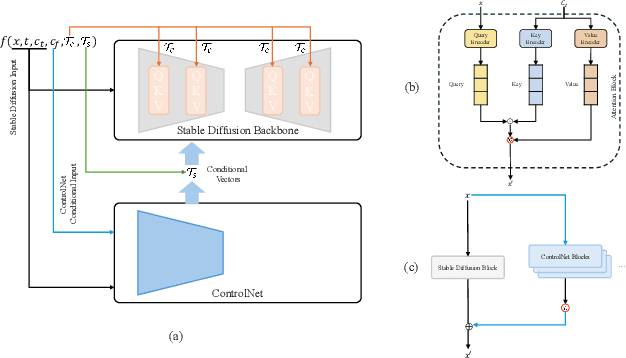
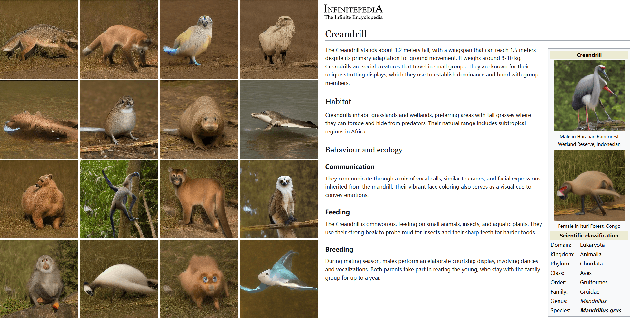
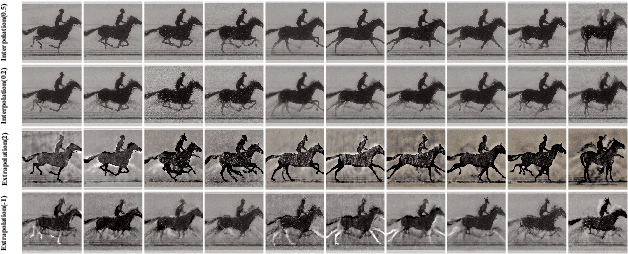
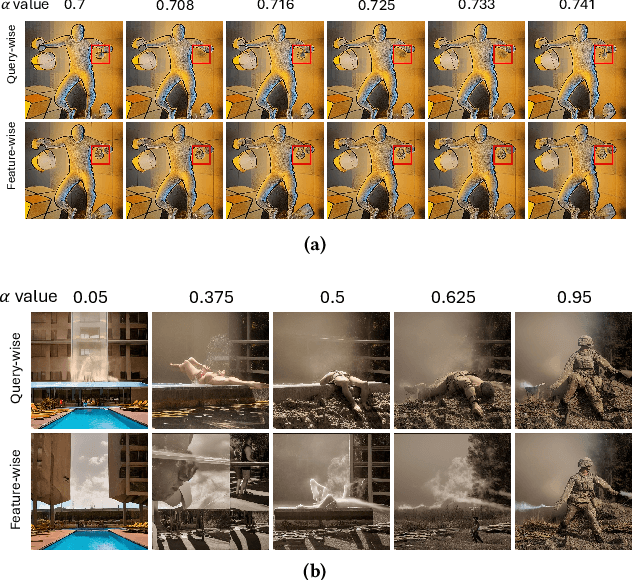
Latent space is one of the key concepts in generative AI, offering powerful means for creative exploration through vector manipulation. However, diffusion models like Stable Diffusion lack the intuitive latent vector control found in GANs, limiting their flexibility for artistic expression. This paper introduces \workname, a framework for integrating customizable latent space operations into the diffusion process. By enabling direct manipulation of conceptual and spatial representations, this approach expands creative possibilities in generative art. We demonstrate the potential of this framework through two artworks, \textit{Infinitepedia} and \textit{Latent Motion}, highlighting its use in conceptual blending and dynamic motion generation. Our findings reveal latent space structures with semantic and meaningless regions, offering insights into the geometry of diffusion models and paving the way for further explorations of latent space.
Residual Learning towards High-fidelity Vehicle Dynamics Modeling with Transformer
Feb 17, 2025The vehicle dynamics model serves as a vital component of autonomous driving systems, as it describes the temporal changes in vehicle state. In a long period, researchers have made significant endeavors to accurately model vehicle dynamics. Traditional physics-based methods employ mathematical formulae to model vehicle dynamics, but they are unable to adequately describe complex vehicle systems due to the simplifications they entail. Recent advancements in deep learning-based methods have addressed this limitation by directly regressing vehicle dynamics. However, the performance and generalization capabilities still require further enhancement. In this letter, we address these problems by proposing a vehicle dynamics correction system that leverages deep neural networks to correct the state residuals of a physical model instead of directly estimating the states. This system greatly reduces the difficulty of network learning and thus improves the estimation accuracy of vehicle dynamics. Furthermore, we have developed a novel Transformer-based dynamics residual correction network, DyTR. This network implicitly represents state residuals as high-dimensional queries, and iteratively updates the estimated residuals by interacting with dynamics state features. The experiments in simulations demonstrate the proposed system works much better than physics model, and our proposed DyTR model achieves the best performances on dynamics state residual correction task, reducing the state prediction errors of a simple 3 DoF vehicle model by an average of 92.3% and 59.9% in two dataset, respectively.
Risk Occupancy: A New and Efficient Paradigm through Vehicle-Road-Cloud Collaboration
Aug 14, 2024



This study introduces the 4D Risk Occupancy within a vehicle-road-cloud architecture, integrating the road surface spatial, risk, and temporal dimensions, and endowing the algorithm with beyond-line-of-sight, all-angles, and efficient abilities. The algorithm simplifies risk modeling by focusing on directly observable information and key factors, drawing on the concept of Occupancy Grid Maps (OGM), and incorporating temporal prediction to effectively map current and future risk occupancy. Compared to conventional driving risk fields and grid occupancy maps, this algorithm can map global risks more efficiently, simply, and reliably. It can integrate future risk information, adapting to dynamic traffic environments. The 4D Risk Occupancy also unifies the expression of BEV detection and lane line detection results, enhancing the intuitiveness and unity of environmental perception. Using DAIR-V2X data, this paper validates the 4D Risk Occupancy algorithm and develops a local path planning model based on it. Qualitative experiments under various road conditions demonstrate the practicality and robustness of this local path planning model. Quantitative analysis shows that the path planning based on risk occupation significantly improves trajectory planning performance, increasing safety redundancy by 12.5% and reducing average deceleration by 5.41% at an initial braking speed of 8 m/s, thereby improving safety and comfort. This work provides a new global perception method and local path planning method through Vehicle-Road-Cloud architecture, offering a new perceptual paradigm for achieving safer and more efficient autonomous driving.
A Survey on Monocular Re-Localization: From the Perspective of Scene Map Representation
Nov 27, 2023



Monocular Re-Localization (MRL) is a critical component in numerous autonomous applications, which estimates 6 degree-of-freedom poses with regards to the scene map based on a single monocular image. In recent decades, significant progress has been made in the development of MRL techniques. Numerous landmark algorithms have accomplished extraordinary success in terms of localization accuracy and robustness against visual interference. In MRL research, scene maps are represented in various forms, and they determine how MRL methods work and even how MRL methods perform. However, to the best of our knowledge, existing surveys do not provide systematic reviews of MRL from the respective of map. This survey fills the gap by comprehensively reviewing MRL methods employing monocular cameras as main sensors, promoting further research. 1) We commence by delving into the problem definition of MRL and exploring current challenges, while also comparing ours with with previous published surveys. 2) MRL methods are then categorized into five classes according to the representation forms of utilized map, i.e., geo-tagged frames, visual landmarks, point clouds, and vectorized semantic map, and we review the milestone MRL works of each category. 3) To quantitatively and fairly compare MRL methods with various map, we also review some public datasets and provide the performances of some typical MRL methods. The strengths and weakness of different types of MRL methods are analyzed. 4) We finally introduce some topics of interest in this field and give personal opinions. This survey can serve as a valuable referenced materials for newcomers and researchers interested in MRL, and a continuously updated summary of this survey, including reviewed papers and datasets, is publicly available to the community at: https://github.com/jinyummiao/map-in-mono-reloc.
FuseSR: Super Resolution for Real-time Rendering through Efficient Multi-resolution Fusion
Oct 15, 2023The workload of real-time rendering is steeply increasing as the demand for high resolution, high refresh rates, and high realism rises, overwhelming most graphics cards. To mitigate this problem, one of the most popular solutions is to render images at a low resolution to reduce rendering overhead, and then manage to accurately upsample the low-resolution rendered image to the target resolution, a.k.a. super-resolution techniques. Most existing methods focus on exploiting information from low-resolution inputs, such as historical frames. The absence of high frequency details in those LR inputs makes them hard to recover fine details in their high-resolution predictions. In this paper, we propose an efficient and effective super-resolution method that predicts high-quality upsampled reconstructions utilizing low-cost high-resolution auxiliary G-Buffers as additional input. With LR images and HR G-buffers as input, the network requires to align and fuse features at multi resolution levels. We introduce an efficient and effective H-Net architecture to solve this problem and significantly reduce rendering overhead without noticeable quality deterioration. Experiments show that our method is able to produce temporally consistent reconstructions in $4 \times 4$ and even challenging $8 \times 8$ upsampling cases at 4K resolution with real-time performance, with substantially improved quality and significant performance boost compared to existing works.
Seal-3D: Interactive Pixel-Level Editing for Neural Radiance Fields
Jul 27, 2023



With the popularity of implicit neural representations, or neural radiance fields (NeRF), there is a pressing need for editing methods to interact with the implicit 3D models for tasks like post-processing reconstructed scenes and 3D content creation. While previous works have explored NeRF editing from various perspectives, they are restricted in editing flexibility, quality, and speed, failing to offer direct editing response and instant preview. The key challenge is to conceive a locally editable neural representation that can directly reflect the editing instructions and update instantly. To bridge the gap, we propose a new interactive editing method and system for implicit representations, called Seal-3D, which allows users to edit NeRF models in a pixel-level and free manner with a wide range of NeRF-like backbone and preview the editing effects instantly. To achieve the effects, the challenges are addressed by our proposed proxy function mapping the editing instructions to the original space of NeRF models and a teacher-student training strategy with local pretraining and global finetuning. A NeRF editing system is built to showcase various editing types. Our system can achieve compelling editing effects with an interactive speed of about 1 second.
Learning-based Inverse Rendering of Complex Indoor Scenes with Differentiable Monte Carlo Raytracing
Nov 06, 2022



Indoor scenes typically exhibit complex, spatially-varying appearance from global illumination, making inverse rendering a challenging ill-posed problem. This work presents an end-to-end, learning-based inverse rendering framework incorporating differentiable Monte Carlo raytracing with importance sampling. The framework takes a single image as input to jointly recover the underlying geometry, spatially-varying lighting, and photorealistic materials. Specifically, we introduce a physically-based differentiable rendering layer with screen-space ray tracing, resulting in more realistic specular reflections that match the input photo. In addition, we create a large-scale, photorealistic indoor scene dataset with significantly richer details like complex furniture and dedicated decorations. Further, we design a novel out-of-view lighting network with uncertainty-aware refinement leveraging hypernetwork-based neural radiance fields to predict lighting outside the view of the input photo. Through extensive evaluations on common benchmark datasets, we demonstrate superior inverse rendering quality of our method compared to state-of-the-art baselines, enabling various applications such as complex object insertion and material editing with high fidelity. Code and data will be made available at \url{https://jingsenzhu.github.io/invrend}.