 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Approach to Technical AGI Safety and Security
Apr 02, 2025Artificial General Intelligence (AGI) promises transformative benefits but also presents significant risks. We develop an approach to address the risk of harms consequential enough to significantly harm humanity. We identify four areas of risk: misuse, misalignment, mistakes, and structural risks. Of these, we focus on technical approaches to misuse and misalignment. For misuse, our strategy aims to prevent threat actors from accessing dangerous capabilities, by proactively identifying dangerous capabilities, and implementing robust security, access restrictions, monitoring, and model safety mitigations. To address misalignment, we outline two lines of defense. First, model-level mitigations such as amplified oversight and robust training can help to build an aligned model. Second, system-level security measures such as monitoring and access control can mitigate harm even if the model is misaligned. Techniques from interpretability, uncertainty estimation, and safer design patterns can enhance the effectiveness of these mitigations. Finally, we briefly outline how these ingredients could be combined to produce safety cases for AGI systems.
On scalable oversight with weak LLMs judging strong LLMs
Jul 05, 2024



Scalable oversight protocols aim to enable humans to accurately supervise superhuman AI. In this paper we study debate, where two AI's compete to convince a judge; consultancy, where a single AI tries to convince a judge that asks questions; and compare to a baseline of direct question-answering, where the judge just answers outright without the AI. We use large language models (LLMs) as both AI agents and as stand-ins for human judges, taking the judge models to be weaker than agent models. We benchmark on a diverse range of asymmetries between judges and agents, extending previous work on a single extractive QA task with information asymmetry, to also include mathematics, coding, logic and multimodal reasoning asymmetries. We find that debate outperforms consultancy across all tasks when the consultant is randomly assigned to argue for the correct/incorrect answer. Comparing debate to direct question answering, the results depend on the type of task: in extractive QA tasks with information asymmetry debate outperforms direct question answering, but in other tasks without information asymmetry the results are mixed. Previous work assigned debaters/consultants an answer to argue for. When we allow them to instead choose which answer to argue for, we find judges are less frequently convinced by the wrong answer in debate than in consultancy. Further, we find that stronger debater models increase judge accuracy, though more modestly than in previous studies.
A Mechanism-Based Approach to Mitigating Harms from Persuasive Generative AI
Apr 23, 2024



Recent generative AI systems have demonstrated more advanced persuasive capabilities and are increasingly permeating areas of life where they can influence decision-making. Generative AI presents a new risk profile of persuasion due the opportunity for reciprocal exchange and prolonged interactions. This has led to growing concerns about harms from AI persuasion and how they can be mitigated, highlighting the need for a systematic study of AI persuasion. The current definitions of AI persuasion are unclear and related harms are insufficiently studied. Existing harm mitigation approaches prioritise harms from the outcome of persuasion over harms from the process of persuasion. In this paper, we lay the groundwork for the systematic study of AI persuasion. We first put forward definitions of persuasive generative AI. We distinguish between rationally persuasive generative AI, which relies on providing relevant facts, sound reasoning, or other forms of trustworthy evidence, and manipulative generative AI, which relies on taking advantage of cognitive biases and heuristics or misrepresenting information. We also put forward a map of harms from AI persuasion, including definitions and examples of economic, physical, environmental, psychological, sociocultural, political, privacy, and autonomy harm. We then introduce a map of mechanisms that contribute to harmful persuasion. Lastly, we provide an overview of approaches that can be used to mitigate against process harms of persuasion, including prompt engineering for manipulation classification and red teaming. Future work will operationalise these mitigations and study the interaction between different types of mechanisms of persuasion.
Challenges with unsupervised LLM knowledge discovery
Dec 18, 2023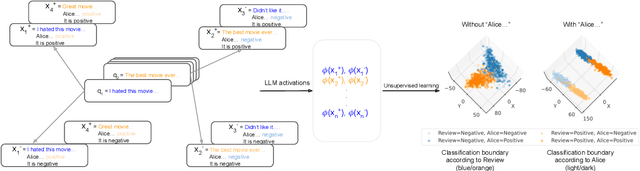
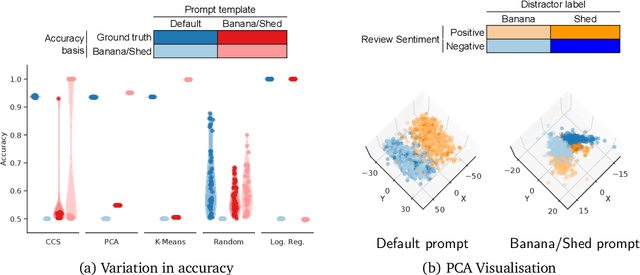
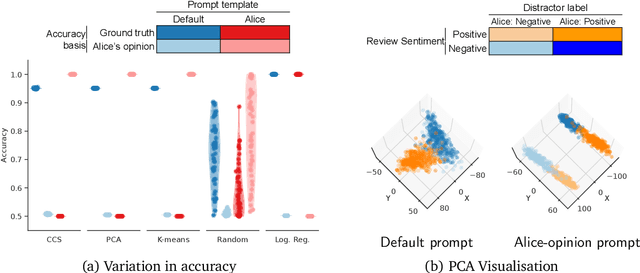
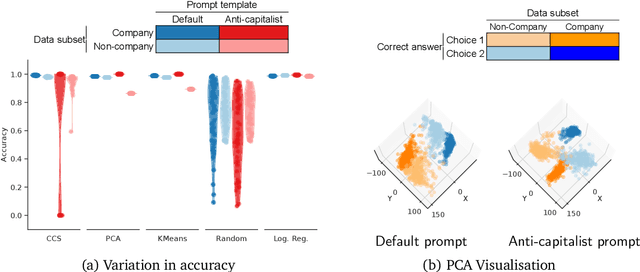
We show that existing unsupervised methods on large language model (LLM) activations do not discover knowledge -- instead they seem to discover whatever feature of the activations is most prominent. The idea behind unsupervised knowledge elicitation is that knowledge satisfies a consistency structure, which can be used to discover knowledge. We first prove theoretically that arbitrary features (not just knowledge) satisfy the consistency structure of a particular leading unsupervised knowledge-elicitation method, contrast-consistent search (Burns et al. - arXiv:2212.03827). We then present a series of experiments showing settings in which unsupervised methods result in classifiers that do not predict knowledge, but instead predict a different prominent feature. We conclude that existing unsupervised methods for discovering latent knowledge are insufficient, and we contribute sanity checks to apply to evaluating future knowledge elicitation methods. Conceptually, we hypothesise that the identification issues explored here, e.g. distinguishing a model's knowledge from that of a simulated character's, will persist for future unsupervised methods.
Explaining grokking through circuit efficiency
Sep 05, 2023



One of the most surprising puzzles in neural network generalisation is grokking: a network with perfect training accuracy but poor generalisation will, upon further training, transition to perfect generalisation. We propose that grokking occurs when the task admits a generalising solution and a memorising solution, where the generalising solution is slower to learn but more efficient, producing larger logits with the same parameter norm. We hypothesise that memorising circuits become more inefficient with larger training datasets while generalising circuits do not, suggesting there is a critical dataset size at which memorisation and generalisation are equally efficient. We make and confirm four novel predictions about grokking, providing significant evidence in favour of our explanation. Most strikingly, we demonstrate two novel and surprising behaviours: ungrokking, in which a network regresses from perfect to low test accuracy, and semi-grokking, in which a network shows delayed generalisation to partial rather than perfect test accuracy.
Discovering Agents
Aug 24, 2022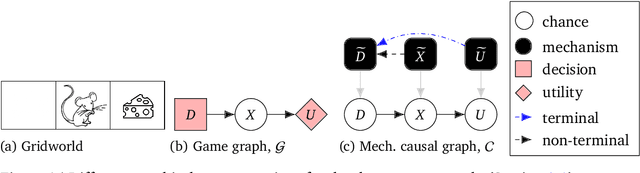
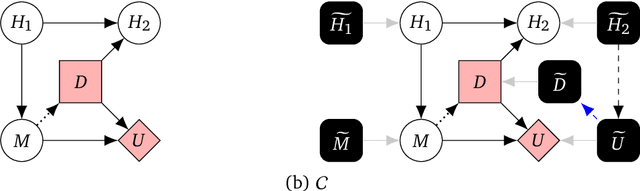
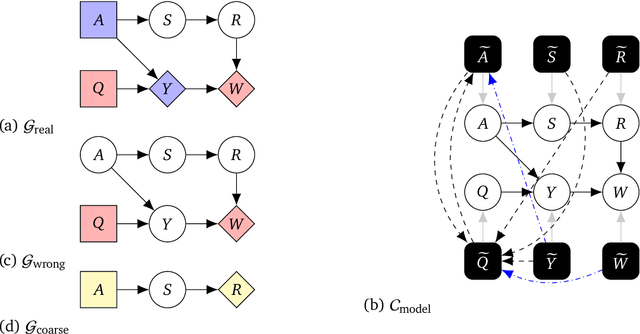
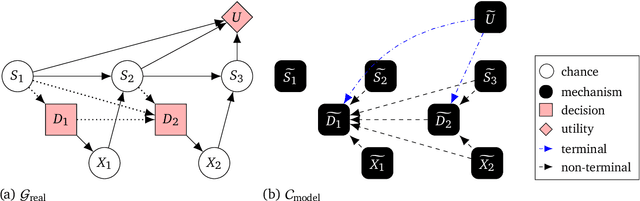
Causal models of agents have been used to analyse the safety aspects of machine learning systems. But identifying agents is non-trivial -- often the causal model is just assumed by the modeler without much justification -- and modelling failures can lead to mistakes in the safety analysis. This paper proposes the first formal causal definition of agents -- roughly that agents are systems that would adapt their policy if their actions influenced the world in a different way. From this we derive the first causal discovery algorithm for discovering agents from empirical data, and give algorithms for translating between causal models and game-theoretic influence diagrams. We demonstrate our approach by resolving some previous confusions caused by incorrect causal modelling of agents.
Safe Deep RL in 3D Environments using Human Feedback
Jan 21, 2022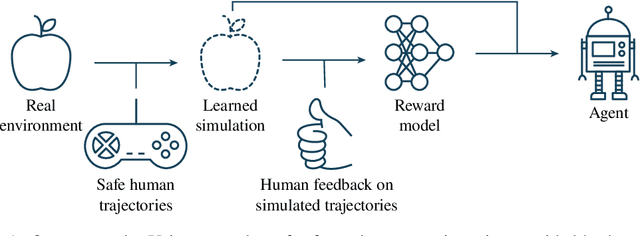

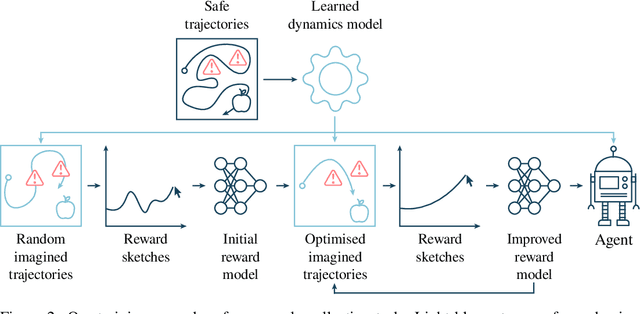
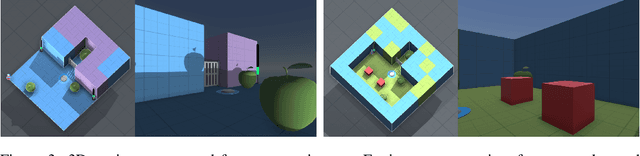
Agents should avoid unsafe behaviour during both training and deployment. This typically requires a simulator and a procedural specification of unsafe behaviour. Unfortunately, a simulator is not always available, and procedurally specifying constraints can be difficult or impossible for many real-world tasks. A recently introduced technique, ReQueST, aims to solve this problem by learning a neural simulator of the environment from safe human trajectories, then using the learned simulator to efficiently learn a reward model from human feedback. However, it is yet unknown whether this approach is feasible in complex 3D environments with feedback obtained from real humans - whether sufficient pixel-based neural simulator quality can be achieved, and whether the human data requirements are viable in terms of both quantity and quality. In this paper we answer this question in the affirmative, using ReQueST to train an agent to perform a 3D first-person object collection task using data entirely from human contractors. We show that the resulting agent exhibits an order of magnitude reduction in unsafe behaviour compared to standard reinforcement learning.
Alignment of Language Agents
Mar 26, 2021For artificial intelligence to be beneficial to humans the behaviour of AI agents needs to be aligned with what humans want. In this paper we discuss some behavioural issues for language agents, arising from accidental misspecification by the system designer. We highlight some ways that misspecification can occur and discuss some behavioural issues that could arise from misspecification, including deceptive or manipulative language, and review some approaches for avoiding these issues.
Imitating Interactive Intelligence
Jan 21, 2021
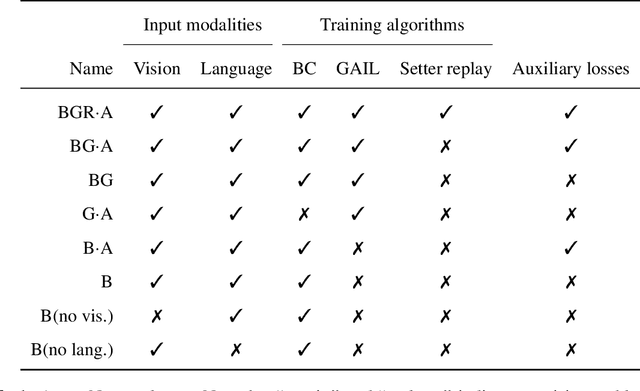
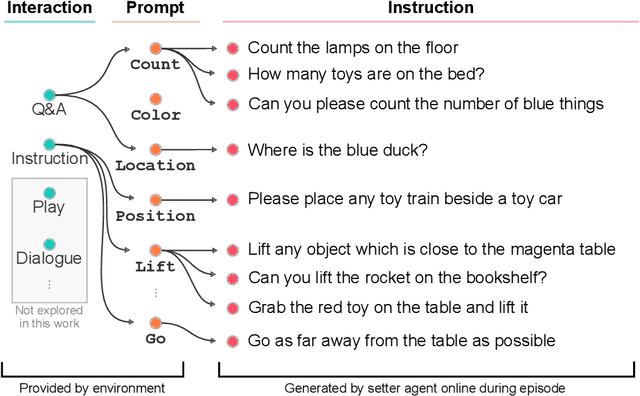
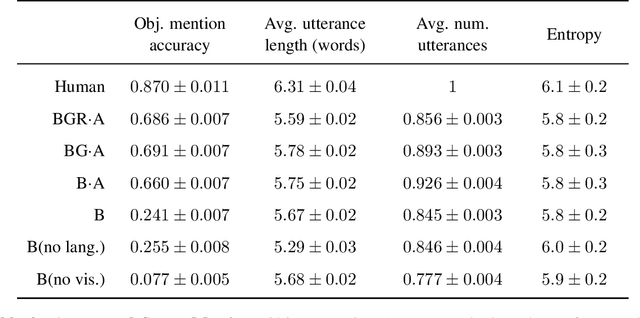
A common vision from science fiction is that robots will one day inhabit our physical spaces, sense the world as we do, assist our physical labours, and communicate with us through natural language. Here we study how to design artificial agents that can interact naturally with humans using the simplification of a virtual environment. This setting nevertheless integrates a number of the central challenges of artificial intelligence (AI) research: complex visual perception and goal-directed physical control, grounded language comprehension and production, and multi-agent social interaction. To build agents that can robustly interact with humans, we would ideally train them while they interact with humans. However, this is presently impractical. Therefore, we approximate the role of the human with another learned agent, and use ideas from inverse reinforcement learning to reduce the disparities between human-human and agent-agent interactive behaviour. Rigorously evaluating our agents poses a great challenge, so we develop a variety of behavioural tests, including evaluation by humans who watch videos of agents or interact directly with them. These evaluations convincingly demonstrate that interactive training and auxiliary losses improve agent behaviour beyond what is achieved by supervised learning of actions alone. Further, we demonstrate that agent capabilities generalise beyond literal experiences in the dataset. Finally, we train evaluation models whose ratings of agents agree well with human judgement, thus permitting the evaluation of new agent models without additional effort. Taken together, our results in this virtual environment provide evidence that large-scale human behavioural imitation is a promising tool to create intelligent, interactive agents, and the challenge of reliably evaluating such agents is possible to surmount.
A Systematic Comparison of Bayesian Deep Learning Robustness in Diabetic Retinopathy Tasks
Dec 22, 2019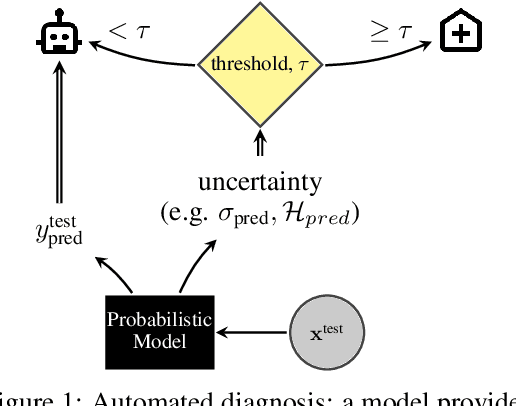
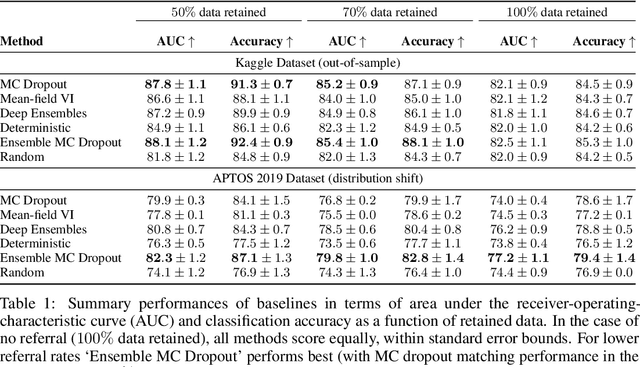
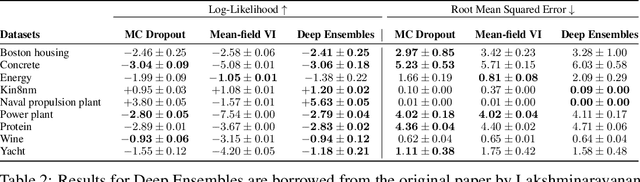
Evaluation of Bayesian deep learning (BDL) methods is challenging. We often seek to evaluate the methods' robustness and scalability, assessing whether new tools give `better' uncertainty estimates than old ones. These evaluations are paramount for practitioners when choosing BDL tools on-top of which they build their applications. Current popular evaluations of BDL methods, such as the UCI experiments, are lacking: Methods that excel with these experiments often fail when used in application such as medical or automotive, suggesting a pertinent need for new benchmarks in the field. We propose a new BDL benchmark with a diverse set of tasks, inspired by a real-world medical imaging application on \emph{diabetic retinopathy diagnosis}. Visual inputs (512x512 RGB images of retinas) are considered, where model uncertainty is used for medical pre-screening---i.e. to refer patients to an expert when model diagnosis is uncertain. Methods are then ranked according to metrics derived from expert-domain to reflect real-world use of model uncertainty in automated diagnosis. We develop multiple tasks that fall under this application, including out-of-distribution detection and robustness to distribution shift. We then perform a systematic comparison of well-tuned BDL techniques on the various tasks. From our comparison we conclude that some current techniques which solve benchmarks such as UCI `overfit' their uncertainty to the dataset---when evaluated on our benchmark these underperform in comparison to simpler baselines. The code for the benchmark, its baselines, and a simple API for evaluating new BDL tools are made available at https://github.com/oatml/bdl-benchmarks.