 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARGaze: Autoregressive Transformers for Online Egocentric Gaze Estimation
Feb 04, 2026Online egocentric gaze estimation predicts where a camera wearer is looking from first-person video using only past and current frames, a task essential for augmented reality and assistive technologies. Unlike third-person gaze estimation, this setting lacks explicit head or eye signals, requiring models to infer current visual attention from sparse, indirect cues such as hand-object interactions and salient scene content. We observe that gaze exhibits strong temporal continuity during goal-directed activities: knowing where a person looked recently provides a powerful prior for predicting where they look next. Inspired by vision-conditioned autoregressive decoding in vision-language models, we propose ARGaze, which reformulates gaze estimation as sequential prediction: at each timestep, a transformer decoder predicts current gaze by conditioning on (i) current visual features and (ii) a fixed-length Gaze Context Window of recent gaze target estimates. This design enforces causality and enables bounded-resource streaming inference. We achieve state-of-the-art performance across multiple egocentric benchmarks under online evaluation, with extensive ablations validating that autoregressive modeling with bounded gaze history is critical for robust prediction. We will release our source code and pre-trained models.
BEAP-Agent: Backtrackable Execution and Adaptive Planning for GUI Agents
Jan 29, 2026GUI agents are designed to automate repetitive tasks and enhance productivity. However, existing GUI agents struggle to recover once they follow an incorrect exploration path, often leading to task failure. In this work, we model GUI task execution as a DFS process and propose BEAP-Agent, a DFS-based framework that supports long-range, multi-level state backtracking with dynamic task tracking and updating. The framework consists of three collaborative components: Planner, Executor, and Tracker. Together, they enable effective task exploration and execution. BEAP-Agent fills the gap in systematic backtracking mechanisms for GUI agents, offering a systematic solution for long-horizon task exploration. We conducted a systematic evaluation on the OSWorld benchmark, where BEAP-Agent achieved an accuracy of 28.2%, validating the effectiveness of the proposed method.
Can Deep Research Agents Find and Organize? Evaluating the Synthesis Gap with Expert Taxonomies
Jan 18, 2026Deep Research Agents are increasingly used for automated survey generation. However, whether they can write surveys like human experts remains unclear. Existing benchmarks focus on fluency or citation accuracy, but none evaluates the core capabilities: retrieving essential papers and organizing them into coherent knowledge structures. We introduce TaxoBench, a diagnostic benchmark derived from 72 highly-cited computer science surveys. We manually extract expert-authored taxonomy trees containing 3,815 precisely categorized citations as ground truth. Our benchmark supports two evaluation modes: Deep Research mode tests end-to-end retrieval and organization given only a topic, while Bottom-Up mode isolates structuring capability by providing the exact papers human experts used. We evaluate 7 leading Deep Research agents and 12 frontier LLMs. Results reveal a dual bottleneck: the best agent recalls only 20.9% of expert-selected papers, and even with perfect input, the best model achieves only 0.31 ARI in organization. Current deep research agents remain far from expert-level survey writing. Our benchmark is publicly available at https://github.com/KongLongGeFDU/TaxoBench.
FlowDet: Overcoming Perspective and Scale Challenges in Real-Time End-to-End Traffic Detection
Aug 27, 2025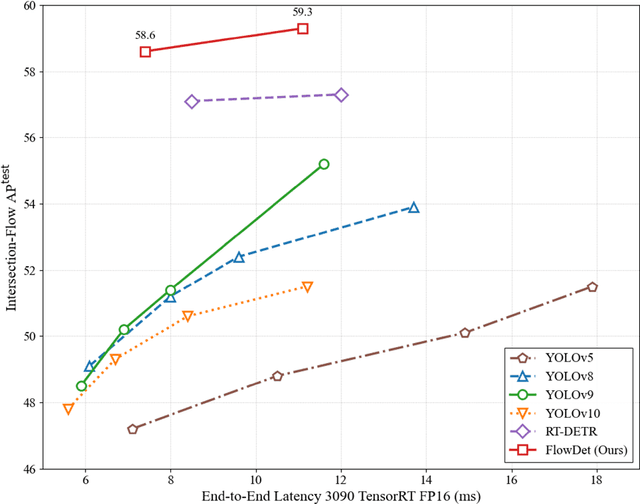
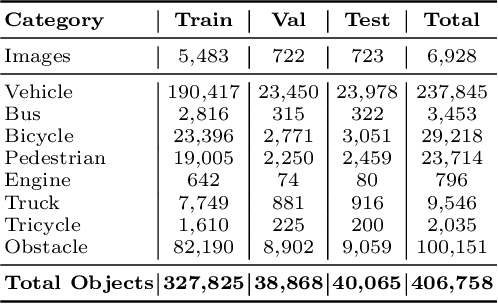
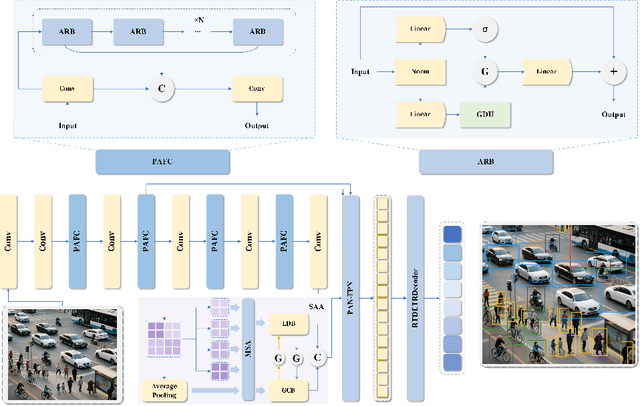
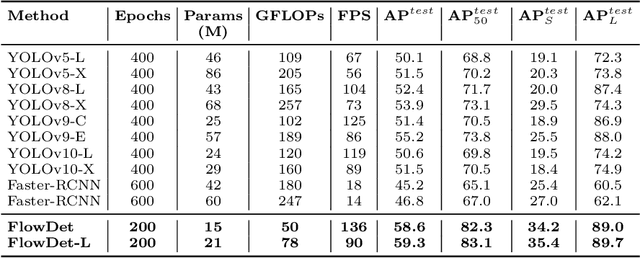
End-to-end object detectors offer a promising NMS-free paradigm for real-time applications, yet their high computational cost remains a significant barrier, particularly for complex scenarios like intersection traffic monitoring. To address this challenge, we propose FlowDet, a high-speed detector featuring a decoupled encoder optimization strategy applied to the DETR architecture. Specifically, FlowDet employs a novel Geometric Deformable Unit (GDU) for traffic-aware geometric modeling and a Scale-Aware Attention (SAA) module to maintain high representational power across extreme scale variations. To rigorously evaluate the model's performance in environments with severe occlusion and high object density, we collected the Intersection-Flow-5k dataset, a new challenging scene for this task. Evaluated on Intersection-Flow-5k, FlowDet establishes a new state-of-the-art. Compared to the strong RT-DETR baseline, it improves AP(test) by 1.5% and AP50(test) by 1.6%, while simultaneously reducing GFLOPs by 63.2% and increasing inference speed by 16.2%. Our work demonstrates a new path towards building highly efficient and accurate detectors for demanding, real-world perception systems. The Intersection-Flow-5k dataset is available at https://github.com/AstronZh/Intersection-Flow-5K.
ReEx-SQL: Reasoning with Execution-Aware Reinforcement Learning for Text-to-SQL
May 19, 2025In Text-to-SQL, execution feedback is essential for guiding large language models (LLMs) to reason accurately and generate reliable SQL queries. However, existing methods treat execution feedback solely as a post-hoc signal for correction or selection, failing to integrate it into the generation process. This limitation hinders their ability to address reasoning errors as they occur, ultimately reducing query accuracy and robustness. To address this issue, we propose ReEx-SQL (Reasoning with Execution-Aware Reinforcement Learning), a framework for Text-to-SQL that enables models to interact with the database during decoding and dynamically adjust their reasoning based on execution feedback. ReEx-SQL introduces an execution-aware reasoning paradigm that interleaves intermediate SQL execution into reasoning paths, facilitating context-sensitive revisions. It achieves this through structured prompts with markup tags and a stepwise rollout strategy that integrates execution feedback into each stage of generation. To supervise policy learning, we develop a composite reward function that includes an exploration reward, explicitly encouraging effective database interaction. Additionally, ReEx-SQL adopts a tree-based decoding strategy to support exploratory reasoning, enabling dynamic expansion of alternative reasoning paths. Notably, ReEx-SQL achieves 88.8% on Spider and 64.9% on BIRD at the 7B scale, surpassing the standard reasoning baseline by 2.7% and 2.6%, respectively. It also shows robustness, achieving 85.2% on Spider-Realistic with leading performance. In addition, its tree-structured decoding improves efficiency and performance over linear decoding, reducing inference time by 51.9% on the BIRD development set.
"This really lets us see the entire world:" Designing a conversational telepresence robot for homebound older adults
May 23, 2024



In this paper, we explore the design and use of conversational telepresence robots to help homebound older adults interact with the external world. An initial needfinding study (N=8) using video vignettes revealed older adults' experiential needs for robot-mediated remote experiences such as exploration, reminiscence and social participation. We then designed a prototype system to support these goals and conducted a technology probe study (N=11) to garner a deeper understanding of user preferences for remote experiences. The study revealed user interactive patterns in each desired experience, highlighting the need of robot guidance, social engagements with the robot and the remote bystanders. Our work identifies a novel design space where conversational telepresence robots can be used to foster meaningful interactions in the remote physical environment. We offer design insights into the robot's proactive role in providing guidance and using dialogue to create personalized, contextualized and meaningful experiences.
Springboard, Roadblock or "Crutch"?: How Transgender Users Leverage Voice Changers for Gender Presentation in Social Virtual Reality
Feb 13, 2024
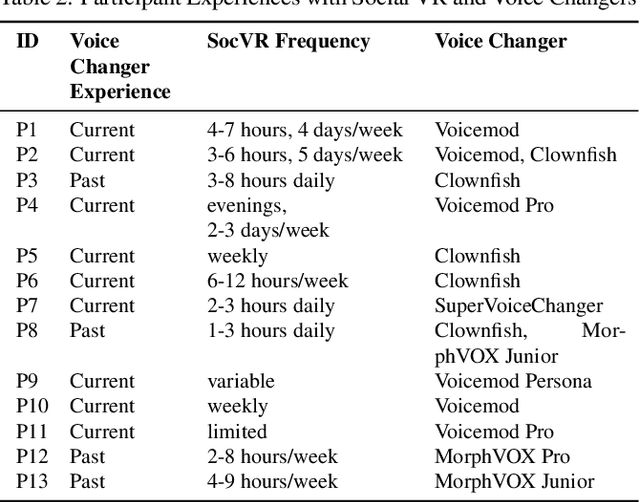


Social virtual reality (VR) serves as a vital platform for transgender individuals to explore their identities through avatars and foster personal connections within online communities. However, it presents a challenge: the disconnect between avatar embodiment and voice representation, often leading to misgendering and harassment. Prior research acknowledges this issue but overlooks the potential solution of voice changers. We interviewed 13 transgender and gender-nonconforming users of social VR platforms, focusing on their experiences with and without voice changers. We found that using a voice changer not only reduces voice-related harassment, but also allows them to experience gender euphoria through both hearing their modified voice and the reactions of others to their modified voice, motivating them to pursue voice training and medication to achieve desired voices. Furthermore, we identified the technical barriers to current voice changer technology and potential improvements to alleviate the problems that transgender and gender-nonconforming users face.
Structure design and coordinated motion analysis of bionic crocodile robot
Nov 03, 2023



Crocodiles, known as one of the oldest and most resilient species on Earth, have demonstrated remarkable locomotor abilities both on land and in water, evolving over millennia to adapt to diverse environments. In this paper, we draw inspiration from crocodiles and introduce a highly biomimetic crocodile robot equipped with multiple degrees of freedom and articulated trunk joints. This design is based on a comprehensive analysis of the structural and motion characteristics observed in real crocodiles. The bionic crocodile robot has the problem of limb-torso incoordination during movement, in order to solve this problem, we apply the D-H method for both forward and inverse kinematics analysis of the robot's legs and spine. Through a series of simulation experiments, we investigate the robot's stability of motion, fault tolerance, and adaptability to the environment in two motor pattern: with and without the involvement of the spine and tail in its movements. Experiment results demonstrate that the bionic crocodile robot exhibits superior motion performance when the spine and tail cooperate with the extremities. This research not only showcases the potential of biomimicry in robotics but also underscores the significance of understanding how nature's designs can inform and enhance our technological innovations.
Artificial Intelligence Security Competition (AISC)
Dec 07, 2022



The security of artificial intelligence (AI) is an important research area towards safe, reliable, and trustworthy AI systems. To accelerate the research on AI security, the Artificial Intelligence Security Competition (AISC) was organized by the Zhongguancun Laboratory, China Industrial Control Systems Cyber Emergency Response Team, Institute for Artificial Intelligence, Tsinghua University, and RealAI as part of the Zhongguancun International Frontier Technology Innovation Competition (https://www.zgc-aisc.com/en). The competition consists of three tracks, including Deepfake Security Competition, Autonomous Driving Security Competition, and Face Recognition Security Competition. This report will introduce the competition rules of these three tracks and the solutions of top-ranking teams in each track.
"I was Confused by It; It was Confused by Me:" Exploring the Experiences of People with Visual Impairments around Mobile Service Robots
Aug 29, 2022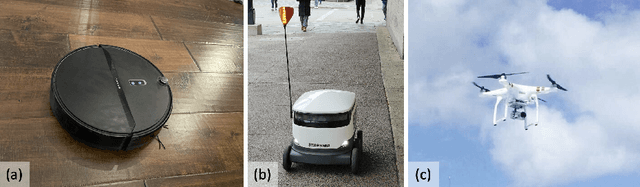

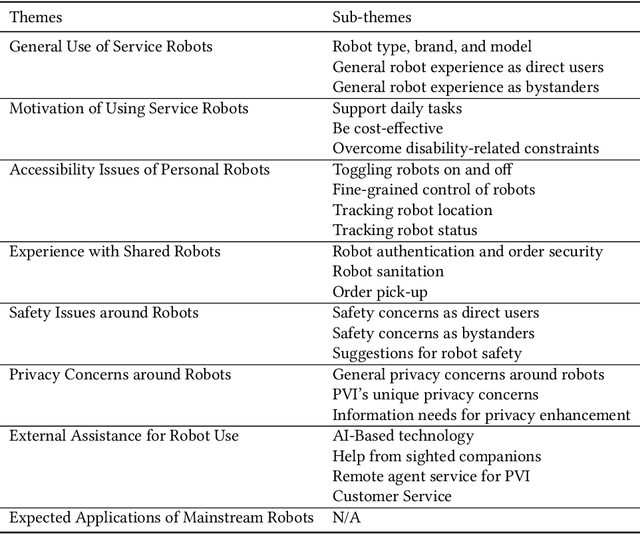
Mobile service robots have become increasingly ubiquitous. However, these robots can pose potential accessibility issues and safety concerns to people with visual impairments (PVI). We sought to explore the challenges faced by PVI around mainstream mobile service robots and identify their needs. Seventeen PVI were interviewed about their experiences with three emerging robots: vacuum robots, delivery robots, and drones. We comprehensively investigated PVI's robot experiences by considering their different roles around robots -- direct users and bystanders. Our study highlighted participants' challenges and concerns about the accessibility, safety, and privacy issues around mobile service robots. We found that the lack of accessible feedback made it difficult for PVI to precisely control, locate, and track the status of the robots. Moreover, encountering mobile robots as bystanders confused and even scared the participants, presenting safety and privacy barriers. We further distilled design considerations for more accessible and safe robots for PVI.