 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding On-the-Fly End-User Robot Programming
Jun 02, 2024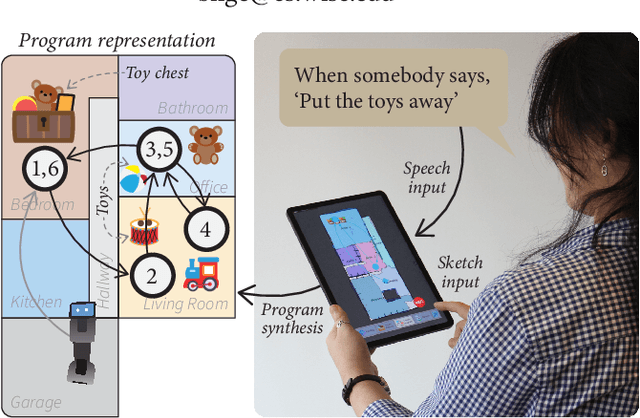
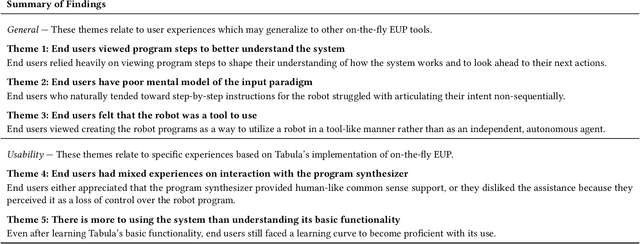
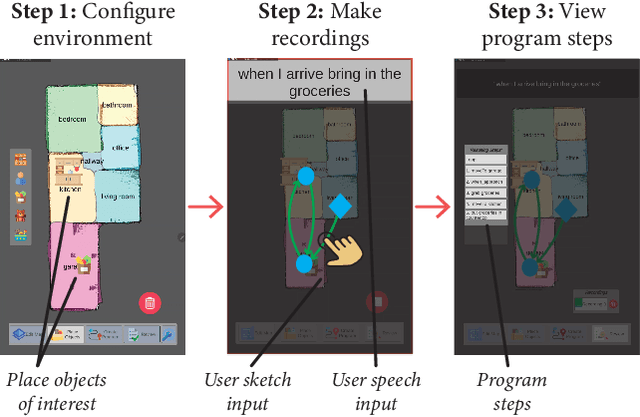
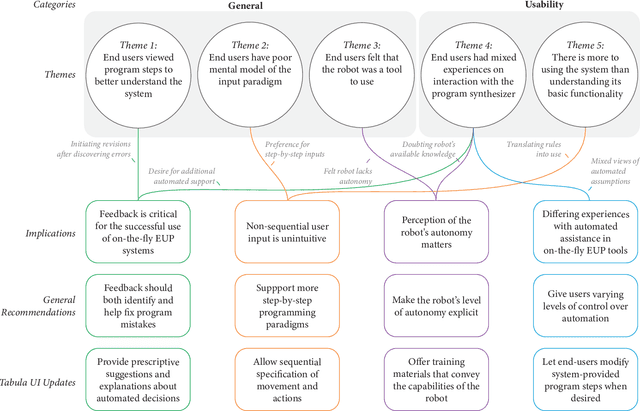
Novel end-user programming (EUP) tools enable on-the-fly (i.e., spontaneous, easy, and rapid) creation of interactions with robotic systems. These tools are expected to empower users in determining system behavior, although very little is understood about how end users perceive, experience, and use these systems. In this paper, we seek to address this gap by investigating end-user experience with on-the-fly robot EUP. We trained 21 end users to use an existing on-the-fly EUP tool, asked them to create robot interactions for four scenarios, and assessed their overall experience. Our findings provide insight into how these systems should be designed to better support end-user experience with on-the-fly EUP, focusing on user interaction with an automatic program synthesizer that resolves imprecise user input, the use of multimodal inputs to express user intent, and the general process of programming a robot.
"This really lets us see the entire world:" Designing a conversational telepresence robot for homebound older adults
May 23, 2024



In this paper, we explore the design and use of conversational telepresence robots to help homebound older adults interact with the external world. An initial needfinding study (N=8) using video vignettes revealed older adults' experiential needs for robot-mediated remote experiences such as exploration, reminiscence and social participation. We then designed a prototype system to support these goals and conducted a technology probe study (N=11) to garner a deeper understanding of user preferences for remote experiences. The study revealed user interactive patterns in each desired experience, highlighting the need of robot guidance, social engagements with the robot and the remote bystanders. Our work identifies a novel design space where conversational telepresence robots can be used to foster meaningful interactions in the remote physical environment. We offer design insights into the robot's proactive role in providing guidance and using dialogue to create personalized, contextualized and meaningful experiences.
Considerations for End-User Development in the Caregiving Domain
Feb 27, 2024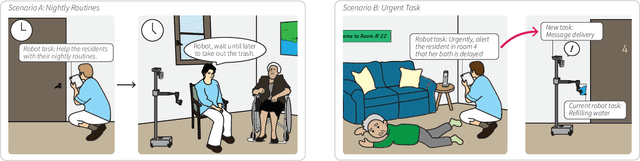
As service robots become more capable of autonomous behaviors, it becomes increasingly important to consider how people communicate with a robot what task it should perform and how to do the task. Accordingly, there has been a rise in attention to end-user development (EUD) interfaces, which enable non-roboticist end users to specify tasks for autonomous robots to perform. However, state-of-the-art EUD interfaces are often constrained through simplified domains or restrictive end-user interaction. Motivated by prior qualitative design work that explores how to integrate a care robot in an assisted living community, we discuss the challenges of EUD in this complex domain. One set of challenges stems from different user-facing representations, e.g., certain tasks may lend themselves better to rule-based trigger-action representations, whereas other tasks may be easier to specify via sequences of actions. The other stems from considering the needs of multiple stakeholders, e.g., caregivers and residents of the facility may all create tasks for the robot, but the robot may not be able to share information about all tasks with all residents due to privacy concerns. We present scenarios that illustrate these challenges and also discuss possible solutions.
End-User Development for Human-Robot Interaction
Feb 27, 2024End-user development (EUD) represents a key step towards making robotics accessible for experts and nonexperts alike. Within academia, researchers investigate novel ways that EUD tools can capture, represent, visualize, analyze, and test developer intent. At the same time, industry researchers increasingly build and ship programming tools that enable customers to interact with their robots. However, despite this growing interest, the role of EUD within HRI is not well defined. EUD struggles to situate itself within a growing array of alternative approaches to application development, such as robot learning and teleoperation. EUD further struggles due to the wide range of individuals who can be considered end users, such as independent third-party application developers, consumers, hobbyists, or even employees of the robot manufacturer. Key questions remain such as how EUD is justified over alternate approaches to application development, which contexts EUD is most suited for, who the target users of an EUD system are, and where interaction between a human and a robot takes place, amongst many other questions. We seek to address these challenges and questions by organizing the first End-User Development for Human-Robot Interaction (EUD4HRI) workshop at the 2024 International Conference of Human-Robot Interaction. The workshop will bring together researchers with a wide range of expertise across academia and industry, spanning perspectives from multiple subfields of robotics, with the primary goal being a consensus of perspectives about the role that EUD must play within human-robot interaction.
Factors that Affect Personalization of Robots for Older Adults
Feb 27, 2024

We introduce a taxonomy of important factors to consider when designing interactions with an assistive robot in a senior living facility. These factors are derived from our reflection on two field studies and are grouped into the following high-level categories: primary user (residents), care partners, robot, facility and external circumstances. We outline how multiple factors in these categories impact different aspects of personalization, such as adjusting interactions based on the unique needs of a resident or modifying alerts about the robot's status for different care partners. This preliminary taxonomy serves as a framework for considering how to deploy personalized assistive robots in the complex caregiving ecosystem.
Knowing Who Knows What: Designing Socially Assistive Robots with Transactive Memory System
May 09, 2023Transactive Memory System (TMS) is a group theory that describes how communication can enable the combination of individual minds into a group. While this theory has been extensively studied in human-human groups, it has not yet been formally applied to socially assistive robot design. We demonstrate how the three-phase TMS group communication process-which involves encoding, storage, and retrieval-can be leveraged to improve decision making in socially assistive robots with multiple stakeholders. By clearly defining how the robot is gaining information, storing and updating its memory, and retrieving information from its memory, we believe that socially assistive robots can make better decisions and provide more transparency behind their actions in the group context. Bringing communication theory to robot design can provide a clear framework to help robots integrate better into human-human group dynamics and thus improve their acceptance and use.
Situated Participatory Design: A Method for In Situ Design of Robotic Interaction with Older Adults
Feb 06, 2023



We present a participatory design method to design human-robot interactions with older adults and its application through a case study of designing an assistive robot for a senior living facility. The method, called Situated Participatory Design (sPD), was designed considering the challenges of working with older adults and involves three phases that enable designing and testing use scenarios through realistic, iterative interactions with the robot. In design sessions with nine residents and three caregivers, we uncovered a number of insights about sPD that help us understand its benefits and limitations. For example, we observed how designs evolved through iterative interactions and how early exposure to the robot helped participants consider using the robot in their daily life. With sPD, we aim to help future researchers to increase and deepen the participation of older adults in designing assistive technologies.
Sketching Robot Programs On the Fly
Feb 06, 2023Service robots for personal use in the home and the workplace require end-user development solutions for swiftly scripting robot tasks as the need arises. Many existing solutions preserve ease, efficiency, and convenience through simple programming interfaces or by restricting task complexity. Others facilitate meticulous task design but often do so at the expense of simplicity and efficiency. There is a need for robot programming solutions that reconcile the complexity of robotics with the on-the-fly goals of end-user development. In response to this need, we present a novel, multimodal, and on-the-fly development system, Tabula. Inspired by a formative design study with a prototype, Tabula leverages a combination of spoken language for specifying the core of a robot task and sketching for contextualizing the core. The result is that developers can script partial, sloppy versions of robot programs to be completed and refined by a program synthesizer. Lastly, we demonstrate our anticipated use cases of Tabula via a set of application scenarios.
Designing for Caregiving: Integrating Robotic Assistance in Senior Living Communities
May 18, 2022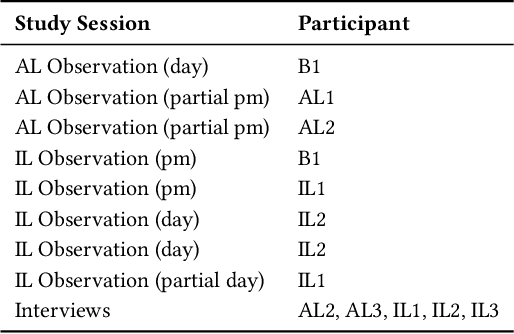
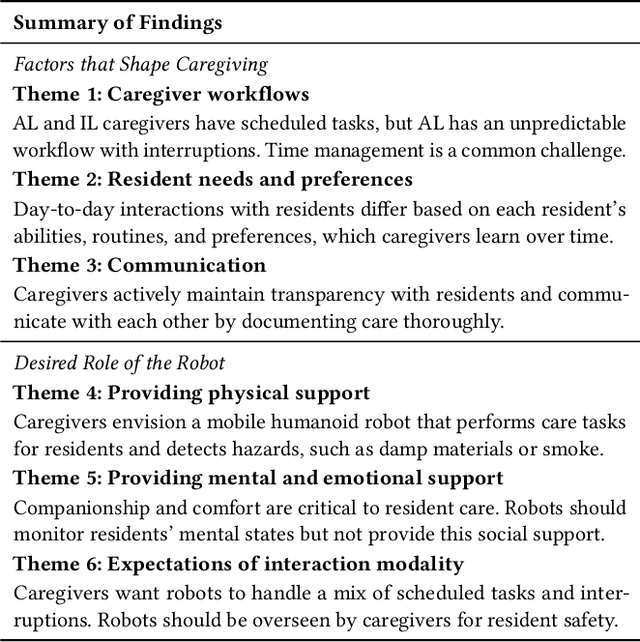
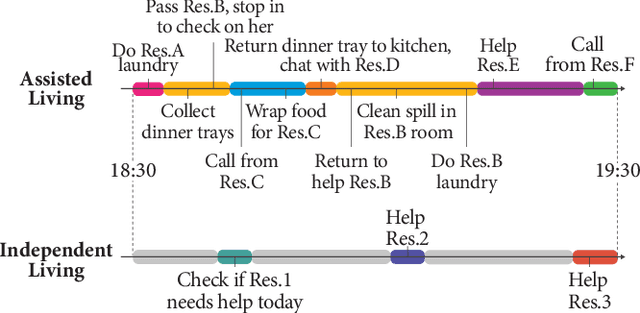
Robots hold significant promise to assist with providing care to an aging population and to help overcome increasing caregiver demands. Although a large body of research has explored robotic assistance for individuals with disabilities and age-related challenges, this past work focuses primarily on building robotic capabilities for assistance and has not yet fully considered how these capabilities could be used by professional caregivers. To better understand the workflows and practices of caregivers who support aging populations and to determine how robotic assistance can be integrated into their work, we conducted a field study using ethnographic and co-design methods in a senior living community. From our results, we created a set of design opportunities for robotic assistance, which we organized into three different parts: supporting caregiver workflows, adapting to resident abilities, and providing feedback to all stakeholders of the interaction.
* 14 pages, 9 figures