 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrowdsourcing Task Traces for Service Robotics
Mar 20, 2024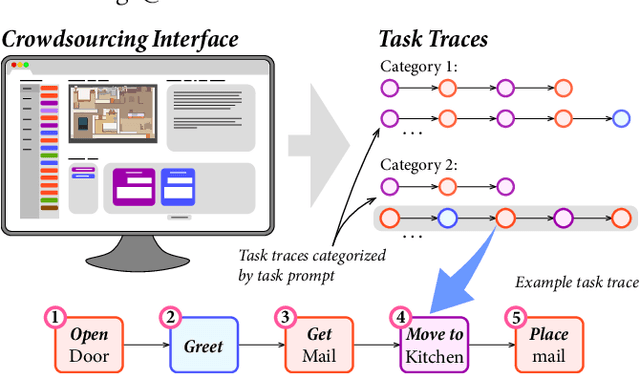
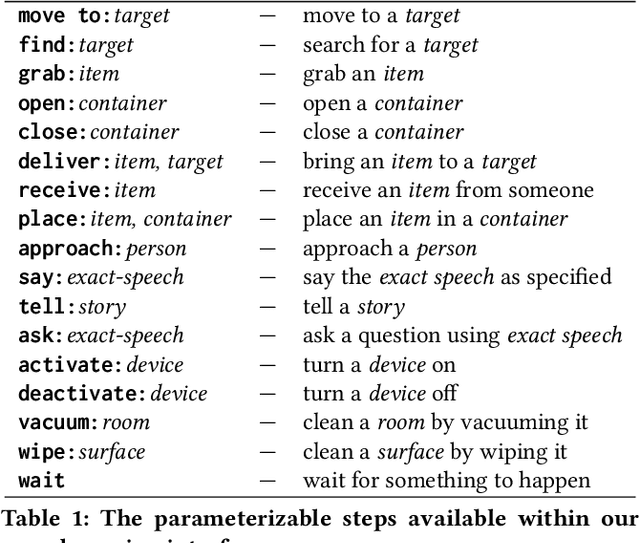
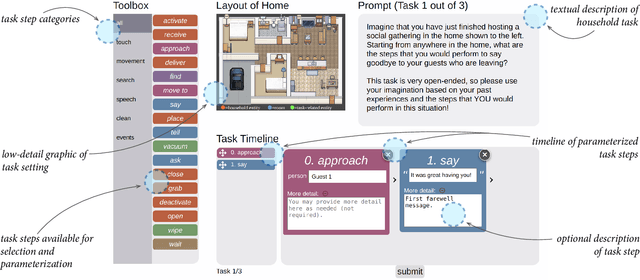
Demonstration is an effective end-user development paradigm for teaching robots how to perform new tasks. In this paper, we posit that demonstration is useful not only as a teaching tool, but also as a way to understand and assist end-user developers in thinking about a task at hand. As a first step toward gaining this understanding, we constructed a lightweight web interface to crowdsource step-by-step instructions of common household tasks, leveraging the imaginations and past experiences of potential end-user developers. As evidence of the utility of our interface, we deployed the interface on Amazon Mechanical Turk and collected 207 task traces that span 18 different task categories. We describe our vision for how these task traces can be operationalized as task models within end-user development tools and provide a roadmap for future work.
Sketching Robot Programs On the Fly
Feb 06, 2023Service robots for personal use in the home and the workplace require end-user development solutions for swiftly scripting robot tasks as the need arises. Many existing solutions preserve ease, efficiency, and convenience through simple programming interfaces or by restricting task complexity. Others facilitate meticulous task design but often do so at the expense of simplicity and efficiency. There is a need for robot programming solutions that reconcile the complexity of robotics with the on-the-fly goals of end-user development. In response to this need, we present a novel, multimodal, and on-the-fly development system, Tabula. Inspired by a formative design study with a prototype, Tabula leverages a combination of spoken language for specifying the core of a robot task and sketching for contextualizing the core. The result is that developers can script partial, sloppy versions of robot programs to be completed and refined by a program synthesizer. Lastly, we demonstrate our anticipated use cases of Tabula via a set of application scenarios.