 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVeriPlan: Integrating Formal Verification and LLMs into End-User Planning
Feb 25, 2025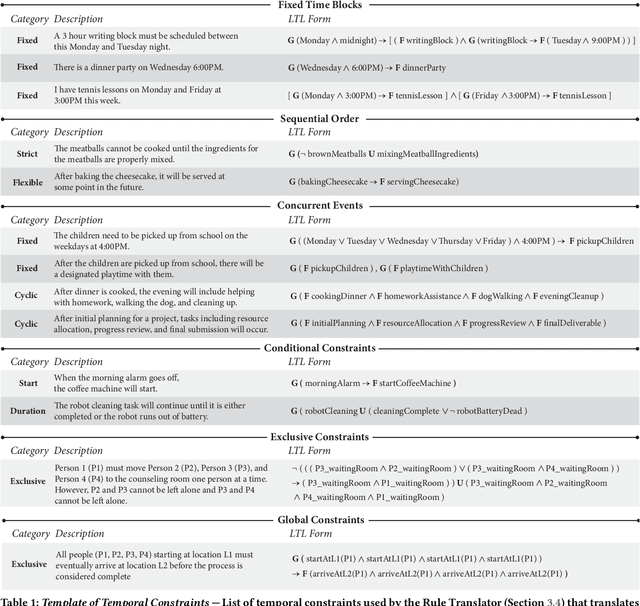



Automated planning is traditionally the domain of experts, utilized in fields like manufacturing and healthcare with the aid of expert planning tools. Recent advancements in LLMs have made planning more accessible to everyday users due to their potential to assist users with complex planning tasks. However, LLMs face several application challenges within end-user planning, including consistency, accuracy, and user trust issues. This paper introduces VeriPlan, a system that applies formal verification techniques, specifically model checking, to enhance the reliability and flexibility of LLMs for end-user planning. In addition to the LLM planner, VeriPlan includes three additional core features -- a rule translator, flexibility sliders, and a model checker -- that engage users in the verification process. Through a user study (n=12), we evaluate VeriPlan, demonstrating improvements in the perceived quality, usability, and user satisfaction of LLMs. Our work shows the effective integration of formal verification and user-control features with LLMs for end-user planning tasks.
Understanding On-the-Fly End-User Robot Programming
Jun 02, 2024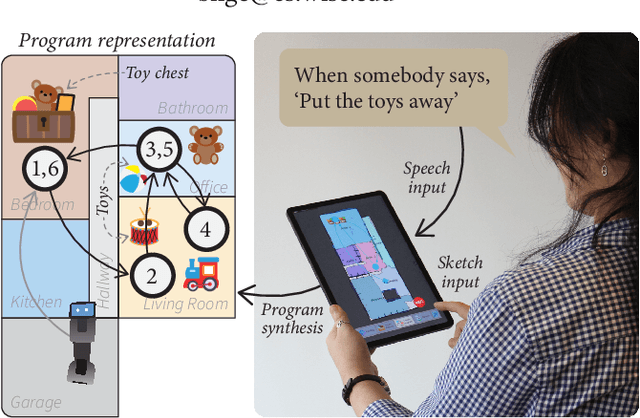
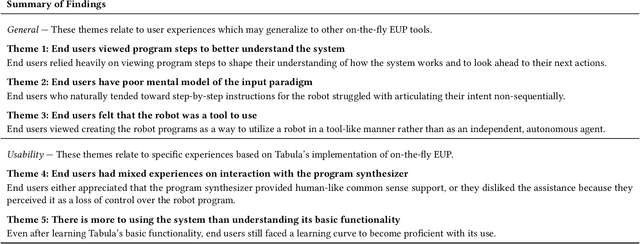
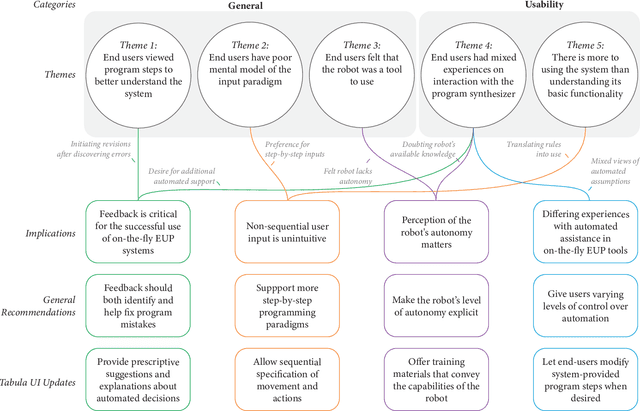
Novel end-user programming (EUP) tools enable on-the-fly (i.e., spontaneous, easy, and rapid) creation of interactions with robotic systems. These tools are expected to empower users in determining system behavior, although very little is understood about how end users perceive, experience, and use these systems. In this paper, we seek to address this gap by investigating end-user experience with on-the-fly robot EUP. We trained 21 end users to use an existing on-the-fly EUP tool, asked them to create robot interactions for four scenarios, and assessed their overall experience. Our findings provide insight into how these systems should be designed to better support end-user experience with on-the-fly EUP, focusing on user interaction with an automatic program synthesizer that resolves imprecise user input, the use of multimodal inputs to express user intent, and the general process of programming a robot.
Crowdsourcing Task Traces for Service Robotics
Mar 20, 2024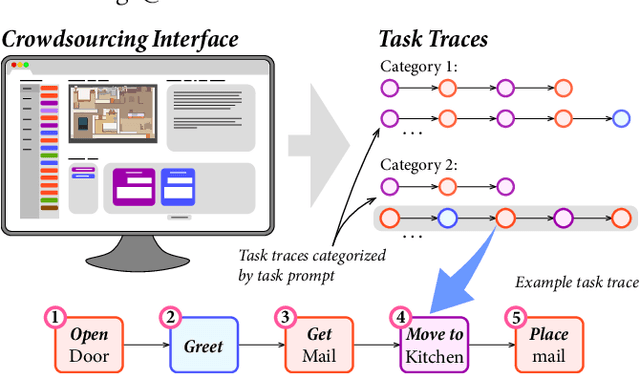
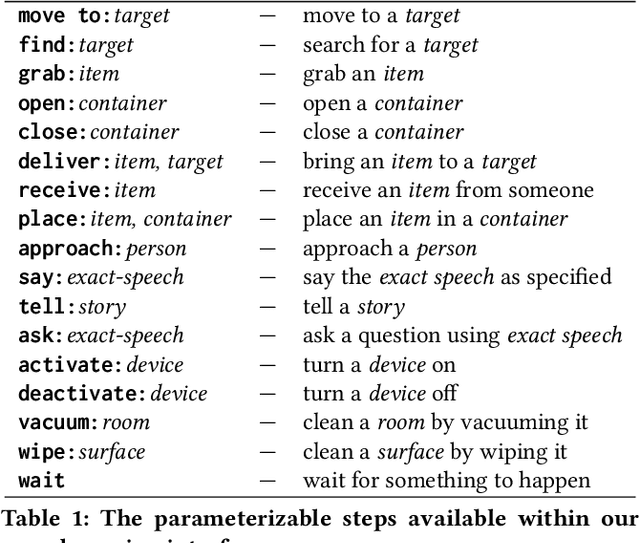
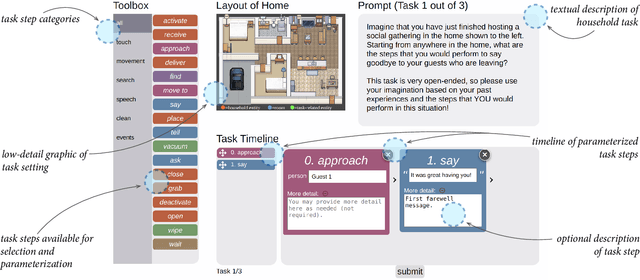
Demonstration is an effective end-user development paradigm for teaching robots how to perform new tasks. In this paper, we posit that demonstration is useful not only as a teaching tool, but also as a way to understand and assist end-user developers in thinking about a task at hand. As a first step toward gaining this understanding, we constructed a lightweight web interface to crowdsource step-by-step instructions of common household tasks, leveraging the imaginations and past experiences of potential end-user developers. As evidence of the utility of our interface, we deployed the interface on Amazon Mechanical Turk and collected 207 task traces that span 18 different task categories. We describe our vision for how these task traces can be operationalized as task models within end-user development tools and provide a roadmap for future work.
Goal-Oriented End-User Programming of Robots
Mar 20, 2024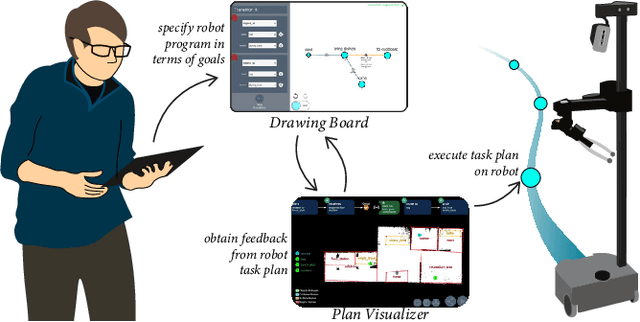
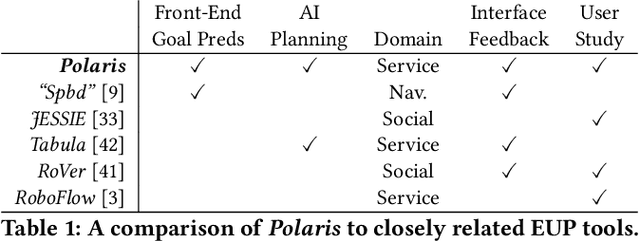

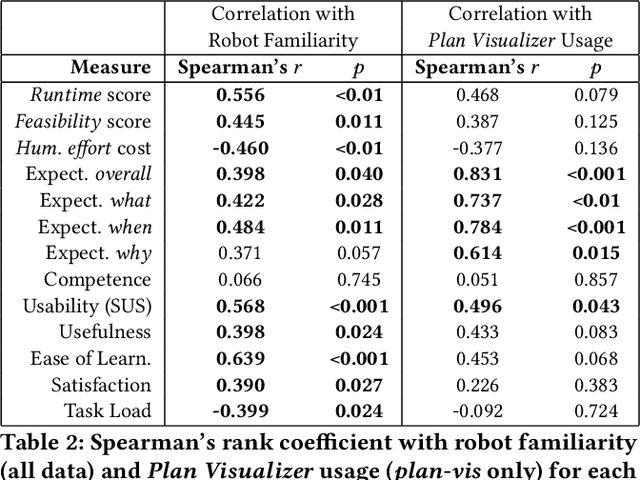
End-user programming (EUP) tools must balance user control with the robot's ability to plan and act autonomously. Many existing task-oriented EUP tools enforce a specific level of control, e.g., by requiring that users hand-craft detailed sequences of actions, rather than offering users the flexibility to choose the level of task detail they wish to express. We thereby created a novel EUP system, Polaris, that in contrast to most existing EUP tools, uses goal predicates as the fundamental building block of programs. Users can thereby express high-level robot objectives or lower-level checkpoints at their choosing, while an off-the-shelf task planner fills in any remaining program detail. To ensure that goal-specified programs adhere to user expectations of robot behavior, Polaris is equipped with a Plan Visualizer that exposes the planner's output to the user before runtime. In what follows, we describe our design of Polaris and its evaluation with 32 human participants. Our results support the Plan Visualizer's ability to help users craft higher-quality programs. Furthermore, there are strong associations between user perception of the robot and Plan Visualizer usage, and evidence that robot familiarity has a key role in shaping user experience.
End-User Development for Human-Robot Interaction
Feb 27, 2024End-user development (EUD) represents a key step towards making robotics accessible for experts and nonexperts alike. Within academia, researchers investigate novel ways that EUD tools can capture, represent, visualize, analyze, and test developer intent. At the same time, industry researchers increasingly build and ship programming tools that enable customers to interact with their robots. However, despite this growing interest, the role of EUD within HRI is not well defined. EUD struggles to situate itself within a growing array of alternative approaches to application development, such as robot learning and teleoperation. EUD further struggles due to the wide range of individuals who can be considered end users, such as independent third-party application developers, consumers, hobbyists, or even employees of the robot manufacturer. Key questions remain such as how EUD is justified over alternate approaches to application development, which contexts EUD is most suited for, who the target users of an EUD system are, and where interaction between a human and a robot takes place, amongst many other questions. We seek to address these challenges and questions by organizing the first End-User Development for Human-Robot Interaction (EUD4HRI) workshop at the 2024 International Conference of Human-Robot Interaction. The workshop will bring together researchers with a wide range of expertise across academia and industry, spanning perspectives from multiple subfields of robotics, with the primary goal being a consensus of perspectives about the role that EUD must play within human-robot interaction.
Considerations for End-User Development in the Caregiving Domain
Feb 27, 2024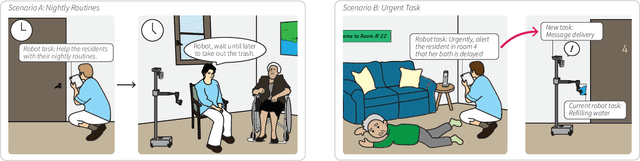
As service robots become more capable of autonomous behaviors, it becomes increasingly important to consider how people communicate with a robot what task it should perform and how to do the task. Accordingly, there has been a rise in attention to end-user development (EUD) interfaces, which enable non-roboticist end users to specify tasks for autonomous robots to perform. However, state-of-the-art EUD interfaces are often constrained through simplified domains or restrictive end-user interaction. Motivated by prior qualitative design work that explores how to integrate a care robot in an assisted living community, we discuss the challenges of EUD in this complex domain. One set of challenges stems from different user-facing representations, e.g., certain tasks may lend themselves better to rule-based trigger-action representations, whereas other tasks may be easier to specify via sequences of actions. The other stems from considering the needs of multiple stakeholders, e.g., caregivers and residents of the facility may all create tasks for the robot, but the robot may not be able to share information about all tasks with all residents due to privacy concerns. We present scenarios that illustrate these challenges and also discuss possible solutions.
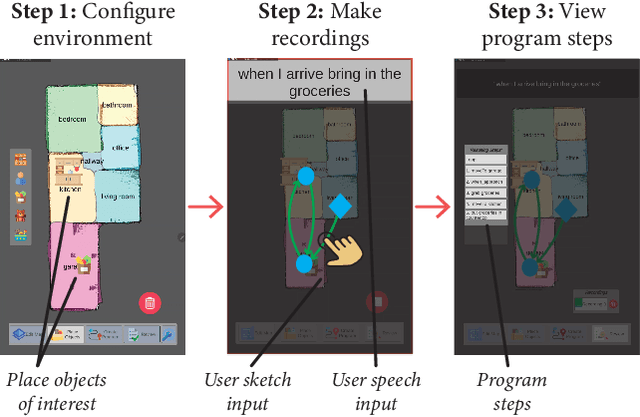
Sketching Robot Programs On the Fly
Feb 06, 2023Service robots for personal use in the home and the workplace require end-user development solutions for swiftly scripting robot tasks as the need arises. Many existing solutions preserve ease, efficiency, and convenience through simple programming interfaces or by restricting task complexity. Others facilitate meticulous task design but often do so at the expense of simplicity and efficiency. There is a need for robot programming solutions that reconcile the complexity of robotics with the on-the-fly goals of end-user development. In response to this need, we present a novel, multimodal, and on-the-fly development system, Tabula. Inspired by a formative design study with a prototype, Tabula leverages a combination of spoken language for specifying the core of a robot task and sketching for contextualizing the core. The result is that developers can script partial, sloppy versions of robot programs to be completed and refined by a program synthesizer. Lastly, we demonstrate our anticipated use cases of Tabula via a set of application scenarios.
PD/EUP Workshop Proceedings
Jul 15, 2022People who need robots are often not the same as people who can program them. This key observation in human-robot interaction (HRI) has lead to a number of challenges when developing robotic applications, since developers must understand the exact needs of end-users. Participatory Design (PD), the process of including stakeholders such as end users early in the robot design process, has been used with noteworthy success in HRI, but typically remains limited to the early phases of development. Resulting robot behaviors are often then hardcoded by engineers or utilized in Wizard-of-Oz (WoZ) systems that rarely achieve autonomy. End-User Programming (EUP), i.e., the research of tools allowing end users with limited computer knowledge to program systems, has been widely applied to the design of robot behaviors for interaction with humans, but these tools risk being used solely as research demonstrations only existing for the amount of time required for them to be evaluated and published. In the PD/EUP Workshop, we aim to facilitate mutual learning between these communities and to create communication opportunities that could help the larger HRI community work towards end-user personalized and adaptable interactions. Both PD and EUP will be key requirements if we want robots to be useful for wider society. From this workshop, we expect new collaboration opportunities to emerge and we aim to formalize new methodologies that integrate PD and EUP approaches.