 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomating Curriculum Learning for Reinforcement Learning using a Skill-Based Bayesian Network
Feb 21, 2025A major challenge for reinforcement learning is automatically generating curricula to reduce training time or improve performance in some target task. We introduce SEBNs (Skill-Environment Bayesian Networks) which model a probabilistic relationship between a set of skills, a set of goals that relate to the reward structure, and a set of environment features to predict policy performance on (possibly unseen) tasks. We develop an algorithm that uses the inferred estimates of agent success from SEBN to weigh the possible next tasks by expected improvement. We evaluate the benefit of the resulting curriculum on three environments: a discrete gridworld, continuous control, and simulated robotics. The results show that curricula constructed using SEBN frequently outperform other baselines.
Towards Online Safety Corrections for Robotic Manipulation Policies
Sep 12, 2024Recent successes in applying reinforcement learning (RL) for robotics has shown it is a viable approach for constructing robotic controllers. However, RL controllers can produce many collisions in environments where new obstacles appear during execution. This poses a problem in safety-critical settings. We present a hybrid approach, called iKinQP-RL, that uses an Inverse Kinematics Quadratic Programming (iKinQP) controller to correct actions proposed by an RL policy at runtime. This ensures safe execution in the presence of new obstacles not present during training. Preliminary experiments illustrate our iKinQP-RL framework completely eliminates collisions with new obstacles while maintaining a high task success rate.
Composing Option Sequences by Adaptation: Initial Results
Sep 12, 2024



Robot manipulation in real-world settings often requires adapting the robot's behavior to the current situation, such as by changing the sequences in which policies execute to achieve the desired task. Problematically, however, we show that composing a novel sequence of five deep RL options to perform a pick-and-place task is unlikely to successfully complete, even if their initiation and termination conditions align. We propose a framework to determine whether sequences will succeed a priori, and examine three approaches that adapt options to sequence successfully if they will not. Crucially, our adaptation methods consider the actual subset of points that the option is trained from or where it ends: (1) trains the second option to start where the first ends; (2) trains the first option to reach the centroid of where the second starts; and (3) trains the first option to reach the median of where the second starts. Our results show that our framework and adaptation methods have promise in adapting options to work in novel sequences.
Goal-Oriented End-User Programming of Robots
Mar 20, 2024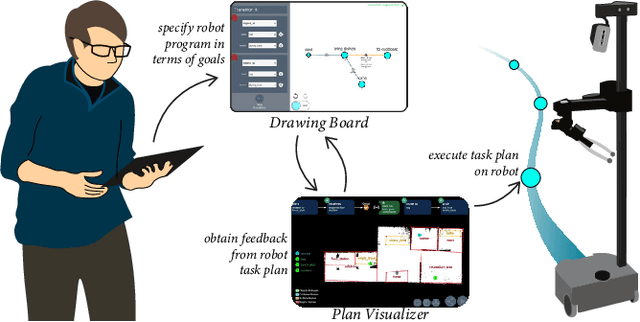
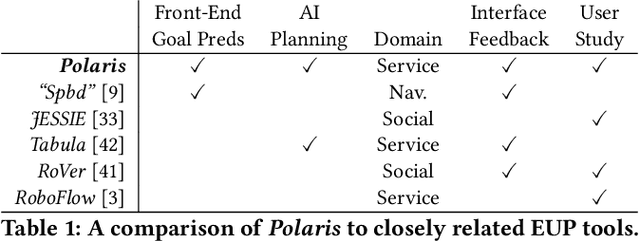

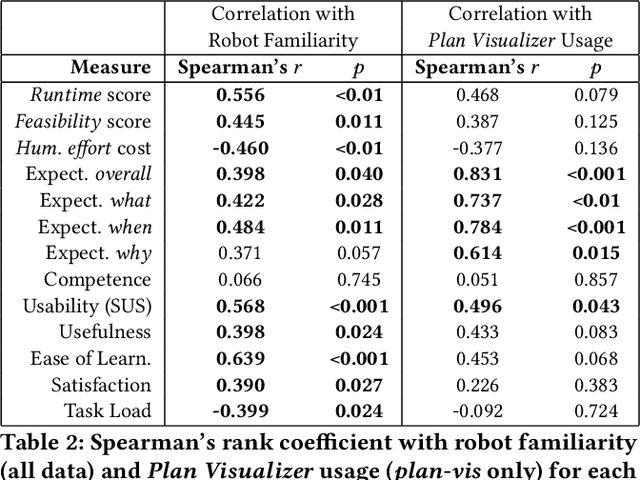
End-user programming (EUP) tools must balance user control with the robot's ability to plan and act autonomously. Many existing task-oriented EUP tools enforce a specific level of control, e.g., by requiring that users hand-craft detailed sequences of actions, rather than offering users the flexibility to choose the level of task detail they wish to express. We thereby created a novel EUP system, Polaris, that in contrast to most existing EUP tools, uses goal predicates as the fundamental building block of programs. Users can thereby express high-level robot objectives or lower-level checkpoints at their choosing, while an off-the-shelf task planner fills in any remaining program detail. To ensure that goal-specified programs adhere to user expectations of robot behavior, Polaris is equipped with a Plan Visualizer that exposes the planner's output to the user before runtime. In what follows, we describe our design of Polaris and its evaluation with 32 human participants. Our results support the Plan Visualizer's ability to help users craft higher-quality programs. Furthermore, there are strong associations between user perception of the robot and Plan Visualizer usage, and evidence that robot familiarity has a key role in shaping user experience.
End-User Development for Human-Robot Interaction
Feb 27, 2024End-user development (EUD) represents a key step towards making robotics accessible for experts and nonexperts alike. Within academia, researchers investigate novel ways that EUD tools can capture, represent, visualize, analyze, and test developer intent. At the same time, industry researchers increasingly build and ship programming tools that enable customers to interact with their robots. However, despite this growing interest, the role of EUD within HRI is not well defined. EUD struggles to situate itself within a growing array of alternative approaches to application development, such as robot learning and teleoperation. EUD further struggles due to the wide range of individuals who can be considered end users, such as independent third-party application developers, consumers, hobbyists, or even employees of the robot manufacturer. Key questions remain such as how EUD is justified over alternate approaches to application development, which contexts EUD is most suited for, who the target users of an EUD system are, and where interaction between a human and a robot takes place, amongst many other questions. We seek to address these challenges and questions by organizing the first End-User Development for Human-Robot Interaction (EUD4HRI) workshop at the 2024 International Conference of Human-Robot Interaction. The workshop will bring together researchers with a wide range of expertise across academia and industry, spanning perspectives from multiple subfields of robotics, with the primary goal being a consensus of perspectives about the role that EUD must play within human-robot interaction.
Considerations for End-User Development in the Caregiving Domain
Feb 27, 2024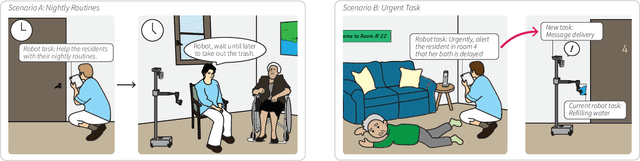
As service robots become more capable of autonomous behaviors, it becomes increasingly important to consider how people communicate with a robot what task it should perform and how to do the task. Accordingly, there has been a rise in attention to end-user development (EUD) interfaces, which enable non-roboticist end users to specify tasks for autonomous robots to perform. However, state-of-the-art EUD interfaces are often constrained through simplified domains or restrictive end-user interaction. Motivated by prior qualitative design work that explores how to integrate a care robot in an assisted living community, we discuss the challenges of EUD in this complex domain. One set of challenges stems from different user-facing representations, e.g., certain tasks may lend themselves better to rule-based trigger-action representations, whereas other tasks may be easier to specify via sequences of actions. The other stems from considering the needs of multiple stakeholders, e.g., caregivers and residents of the facility may all create tasks for the robot, but the robot may not be able to share information about all tasks with all residents due to privacy concerns. We present scenarios that illustrate these challenges and also discuss possible solutions.