 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaClearGrasp: Learning Adaptive Clearing for Zero-Shot Robust Dexterous Grasping in Densely Cluttered Environments
Mar 11, 2026In densely cluttered environments, physical interference, visual occlusions, and unstable contacts often cause direct dexterous grasping to fail, while aggressive singulation strategies may compromise safety. Enabling robots to adaptively decide whether to clear surrounding objects or directly grasp the target is therefore crucial for robust manipulation. We propose AdaClearGrasp, a closed-loop decision-execution framework for adaptive clearing and zero-shot dexterous grasping in densely cluttered environments. The framework formulates manipulation as a controllable high-level decision process that determines whether to directly grasp the target or first clear surrounding objects. A pretrained vision-language model (VLM) interprets visual observations and language task descriptions to reason about grasp interference and generate a high-level planning skeleton, which invokes structured atomic skills through a unified action interface. For dexterous grasping, we train a reinforcement learning policy with a relative hand-object distance representation, enabling zero-shot generalization across diverse object geometries and physical properties. During execution, visual feedback monitors outcomes and triggers replanning upon failures, forming a closed-loop correction mechanism. To evaluate language-conditioned dexterous grasping in clutter, we introduce Clutter-Bench, the first simulation benchmark with graded clutter complexity. It includes seven target objects across three clutter levels, yielding 210 task scenarios. We further perform sim-to-real experiments on three objects under three clutter levels (18 scenarios). Results demonstrate that AdaClearGrasp significantly improves grasp success rates in densely cluttered environments. For more videos and code, please visit our project website: https://chenzixuan99.github.io/adaclear-grasp.github.io/.
Bi-Adapt: Few-shot Bimanual Adaptation for Novel Categories of 3D Objects via Semantic Correspondence
Feb 09, 2026Bimanual manipulation is imperative yet challenging for robots to execute complex tasks, requiring coordinated collaboration between two arms. However, existing methods for bimanual manipulation often rely on costly data collection and training, struggling to generalize to unseen objects in novel categories efficiently. In this paper, we present Bi-Adapt, a novel framework designed for efficient generalization for bimanual manipulation via semantic correspondence. Bi-Adapt achieves cross-category affordance mapping by leveraging the strong capability of vision foundation models. Fine-tuning with restricted data on novel categories, Bi-Adapt exhibits notable generalization to out-of-category objects in a zero-shot manner. Extensive experiments conducted in both simulation and real-world environments validate the effectiveness of our approach and demonstrate its high efficiency, achieving a high success rate on different benchmark tasks across novel categories with limited data. Project website: https://biadapt-project.github.io/
DeCo: Task Decomposition and Skill Composition for Zero-Shot Generalization in Long-Horizon 3D Manipulation
May 01, 2025Generalizing language-conditioned multi-task imitation learning (IL) models to novel long-horizon 3D manipulation tasks remains a significant challenge. To address this, we propose DeCo (Task Decomposition and Skill Composition), a model-agnostic framework compatible with various multi-task IL models, designed to enhance their zero-shot generalization to novel, compositional, long-horizon 3D manipulation tasks. DeCo first decomposes IL demonstrations into a set of modular atomic tasks based on the physical interaction between the gripper and objects, and constructs an atomic training dataset that enables models to learn a diverse set of reusable atomic skills during imitation learning. At inference time, DeCo leverages a vision-language model (VLM) to parse high-level instructions for novel long-horizon tasks, retrieve the relevant atomic skills, and dynamically schedule their execution; a spatially-aware skill-chaining module then ensures smooth, collision-free transitions between sequential skills. We evaluate DeCo in simulation using DeCoBench, a benchmark specifically designed to assess zero-shot generalization of multi-task IL models in compositional long-horizon 3D manipulation. Across three representative multi-task IL models (RVT-2, 3DDA, and ARP), DeCo achieves success rate improvements of 66.67%, 21.53%, and 57.92%, respectively, on 12 novel compositional tasks. Moreover, in real-world experiments, a DeCo-enhanced model trained on only 6 atomic tasks successfully completes 9 novel long-horizon tasks, yielding an average success rate improvement of 53.33% over the base multi-task IL model. Video demonstrations are available at: https://deco226.github.io.
MetaFold: Language-Guided Multi-Category Garment Folding Framework via Trajectory Generation and Foundation Model
Mar 11, 2025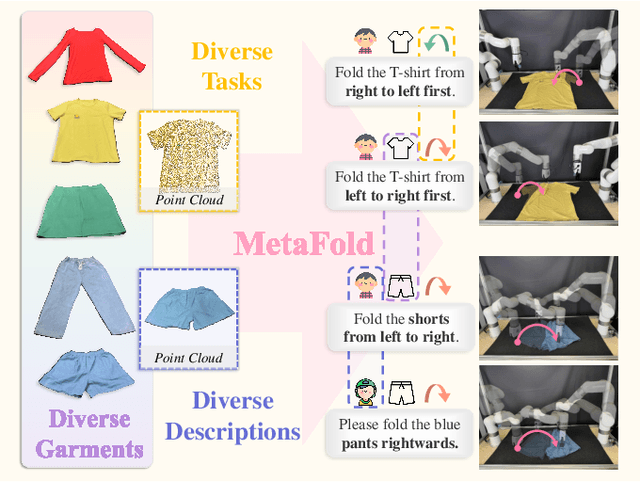
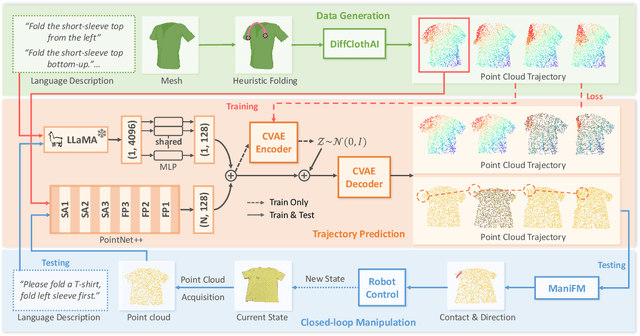
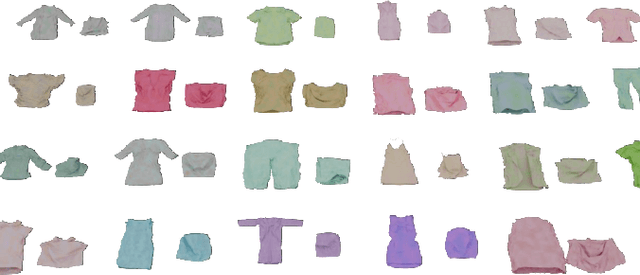
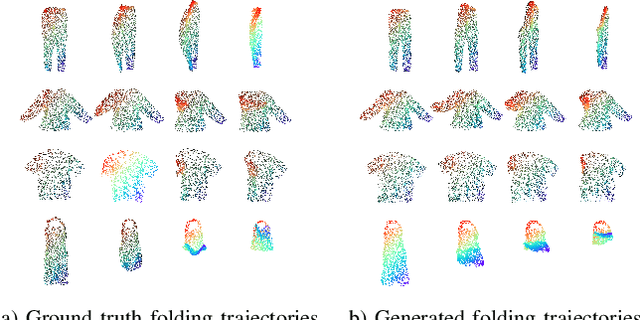
Garment folding is a common yet challenging task in robotic manipulation. The deformability of garments leads to a vast state space and complex dynamics, which complicates precise and fine-grained manipulation. Previous approaches often rely on predefined key points or demonstrations, limiting their generalization across diverse garment categories. This paper presents a framework, MetaFold, that disentangles task planning from action prediction, learning each independently to enhance model generalization. It employs language-guided point cloud trajectory generation for task planning and a low-level foundation model for action prediction. This structure facilitates multi-category learning, enabling the model to adapt flexibly to various user instructions and folding tasks. Experimental results demonstrate the superiority of our proposed framework. Supplementary materials are available on our website: https://meta-fold.github.io/.
TelePhantom: A User-Friendly Teleoperation System with Virtual Assistance for Enhanced Effectiveness
Dec 18, 2024



Dexterous manipulation is a critical area of robotics. In this field, teleoperation faces three key challenges: user-friendliness for novices, safety assurance, and transferability across different platforms. While collecting real robot dexterous manipulation data by teleoperation to train robots has shown impressive results on diverse tasks, due to the morphological differences between human and robot hands, it is not only hard for new users to understand the action mapping but also raises potential safety concerns during operation. To address these limitations, we introduce TelePhantom. This teleoperation system offers real-time visual feedback on robot actions based on human user inputs, with a total hardware cost of less than $1,000. TelePhantom allows the user to see a virtual robot that represents the outcome of the user's next movement. By enabling flexible switching between command visualization and actual execution, this system helps new users learn how to demonstrate quickly and safely. We demonstrate its superiority over other teleoperation systems across five tasks, emphasize its ease of use, and highlight its ease of deployment across diverse input sensors and robotic platforms. We will release our code and a deployment document on our website: https://telephantom.github.io/.
$\mathcal{D(R,O)}$ Grasp: A Unified Representation of Robot and Object Interaction for Cross-Embodiment Dexterous Grasping
Oct 02, 2024



Dexterous grasping is a fundamental yet challenging skill in robotic manipulation, requiring precise interaction between robotic hands and objects. In this paper, we present $\mathcal{D(R,O)}$ Grasp, a novel framework that models the interaction between the robotic hand in its grasping pose and the object, enabling broad generalization across various robot hands and object geometries. Our model takes the robot hand's description and object point cloud as inputs and efficiently predicts kinematically valid and stable grasps, demonstrating strong adaptability to diverse robot embodiments and object geometries. Extensive experiments conducted in both simulated and real-world environments validate the effectiveness of our approach, with significant improvements in success rate, grasp diversity, and inference speed across multiple robotic hands. Our method achieves an average success rate of 87.53% in simulation in less than one second, tested across three different dexterous robotic hands. In real-world experiments using the LeapHand, the method also demonstrates an average success rate of 89%. $\mathcal{D(R,O)}$ Grasp provides a robust solution for dexterous grasping in complex and varied environments. The code, appendix, and videos are available on our project website at https://nus-lins-lab.github.io/drograspweb/.
SGSM: A Foundation-model-like Semi-generalist Sensing Model
Jun 15, 2024

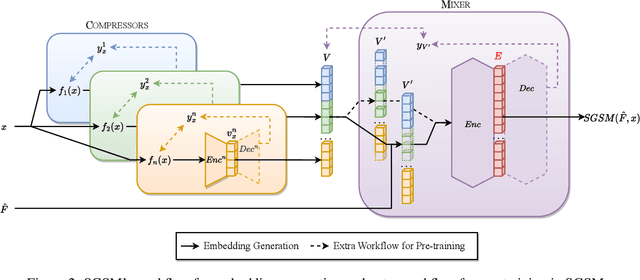

The significance of intelligent sensing systems is growing in the realm of smart services. These systems extract relevant signal features and generate informative representations for particular tasks. However, building the feature extraction component for such systems requires extensive domain-specific expertise or data. The exceptionally rapid development of foundation models is likely to usher in newfound abilities in such intelligent sensing. We propose a new scheme for sensing model, which we refer to as semi-generalist sensing model (SGSM). SGSM is able to semiautomatically solve various tasks using relatively less task-specific labeled data compared to traditional systems. Built through the analysis of the common theoretical model, SGSM can depict different modalities, such as the acoustic and Wi-Fi signal. Experimental results on such two heterogeneous sensors illustrate that SGSM functions across a wide range of scenarios, thereby establishing its broad applicability. In some cases, SGSM even achieves better performance than sensor-specific specialized solutions. Wi-Fi evaluations indicate a 20\% accuracy improvement when applying SGSM to an existing sensing model.
Improving Offline Reinforcement Learning with Inaccurate Simulators
May 07, 2024



Offline reinforcement learning (RL) provides a promising approach to avoid costly online interaction with the real environment. However, the performance of offline RL highly depends on the quality of the datasets, which may cause extrapolation error in the learning process. In many robotic applications, an inaccurate simulator is often available. However, the data directly collected from the inaccurate simulator cannot be directly used in offline RL due to the well-known exploration-exploitation dilemma and the dynamic gap between inaccurate simulation and the real environment. To address these issues, we propose a novel approach to combine the offline dataset and the inaccurate simulation data in a better manner. Specifically, we pre-train a generative adversarial network (GAN) model to fit the state distribution of the offline dataset. Given this, we collect data from the inaccurate simulator starting from the distribution provided by the generator and reweight the simulated data using the discriminator. Our experimental results in the D4RL benchmark and a real-world manipulation task confirm that our method can benefit more from both inaccurate simulator and limited offline datasets to achieve better performance than the state-of-the-art methods.