 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeCo: Task Decomposition and Skill Composition for Zero-Shot Generalization in Long-Horizon 3D Manipulation
May 01, 2025Generalizing language-conditioned multi-task imitation learning (IL) models to novel long-horizon 3D manipulation tasks remains a significant challenge. To address this, we propose DeCo (Task Decomposition and Skill Composition), a model-agnostic framework compatible with various multi-task IL models, designed to enhance their zero-shot generalization to novel, compositional, long-horizon 3D manipulation tasks. DeCo first decomposes IL demonstrations into a set of modular atomic tasks based on the physical interaction between the gripper and objects, and constructs an atomic training dataset that enables models to learn a diverse set of reusable atomic skills during imitation learning. At inference time, DeCo leverages a vision-language model (VLM) to parse high-level instructions for novel long-horizon tasks, retrieve the relevant atomic skills, and dynamically schedule their execution; a spatially-aware skill-chaining module then ensures smooth, collision-free transitions between sequential skills. We evaluate DeCo in simulation using DeCoBench, a benchmark specifically designed to assess zero-shot generalization of multi-task IL models in compositional long-horizon 3D manipulation. Across three representative multi-task IL models (RVT-2, 3DDA, and ARP), DeCo achieves success rate improvements of 66.67%, 21.53%, and 57.92%, respectively, on 12 novel compositional tasks. Moreover, in real-world experiments, a DeCo-enhanced model trained on only 6 atomic tasks successfully completes 9 novel long-horizon tasks, yielding an average success rate improvement of 53.33% over the base multi-task IL model. Video demonstrations are available at: https://deco226.github.io.
RoboHorizon: An LLM-Assisted Multi-View World Model for Long-Horizon Robotic Manipulation
Jan 15, 2025



Efficient control in long-horizon robotic manipulation is challenging due to complex representation and policy learning requirements. Model-based visual reinforcement learning (RL) has shown great potential in addressing these challenges but still faces notable limitations, particularly in handling sparse rewards and complex visual features in long-horizon environments. To address these limitations, we propose the Recognize-Sense-Plan-Act (RSPA) pipeline for long-horizon tasks and further introduce RoboHorizon, an LLM-assisted multi-view world model tailored for long-horizon robotic manipulation. In RoboHorizon, pre-trained LLMs generate dense reward structures for multi-stage sub-tasks based on task language instructions, enabling robots to better recognize long-horizon tasks. Keyframe discovery is then integrated into the multi-view masked autoencoder (MAE) architecture to enhance the robot's ability to sense critical task sequences, strengthening its multi-stage perception of long-horizon processes. Leveraging these dense rewards and multi-view representations, a robotic world model is constructed to efficiently plan long-horizon tasks, enabling the robot to reliably act through RL algorithms. Experiments on two representative benchmarks, RLBench and FurnitureBench, show that RoboHorizon outperforms state-of-the-art visual model-based RL methods, achieving a 23.35% improvement in task success rates on RLBench's 4 short-horizon tasks and a 29.23% improvement on 6 long-horizon tasks from RLBench and 3 furniture assembly tasks from FurnitureBench.
GravMAD: Grounded Spatial Value Maps Guided Action Diffusion for Generalized 3D Manipulation
Sep 30, 2024Robots' ability to follow language instructions and execute diverse 3D tasks is vital in robot learning. Traditional imitation learning-based methods perform well on seen tasks but struggle with novel, unseen ones due to variability. Recent approaches leverage large foundation models to assist in understanding novel tasks, thereby mitigating this issue. However, these methods lack a task-specific learning process, which is essential for an accurate understanding of 3D environments, often leading to execution failures. In this paper, we introduce GravMAD, a sub-goal-driven, language-conditioned action diffusion framework that combines the strengths of imitation learning and foundation models. Our approach breaks tasks into sub-goals based on language instructions, allowing auxiliary guidance during both training and inference. During training, we introduce Sub-goal Keypose Discovery to identify key sub-goals from demonstrations. Inference differs from training, as there are no demonstrations available, so we use pre-trained foundation models to bridge the gap and identify sub-goals for the current task. In both phases, GravMaps are generated from sub-goals, providing flexible 3D spatial guidance compared to fixed 3D positions. Empirical evaluations on RLBench show that GravMAD significantly outperforms state-of-the-art methods, with a 28.63% improvement on novel tasks and a 13.36% gain on tasks encountered during training. These results demonstrate GravMAD's strong multi-task learning and generalization in 3D manipulation. Video demonstrations are available at: https://gravmad.github.io.
Derivative-free tree optimization for complex systems
Apr 05, 2024



A tremendous range of design tasks in materials, physics, and biology can be formulated as finding the optimum of an objective function depending on many parameters without knowing its closed-form expression or the derivative. Traditional derivative-free optimization techniques often rely on strong assumptions about objective functions, thereby failing at optimizing non-convex systems beyond 100 dimensions. Here, we present a tree search method for derivative-free optimization that enables accelerated optimal design of high-dimensional complex systems. Specifically, we introduce stochastic tree expansion, dynamic upper confidence bound, and short-range backpropagation mechanism to evade local optimum, iteratively approximating the global optimum using machine learning models. This development effectively confronts the dimensionally challenging problems, achieving convergence to global optima across various benchmark functions up to 2,000 dimensions, surpassing the existing methods by 10- to 20-fold. Our method demonstrates wide applicability to a wide range of real-world complex systems spanning materials, physics, and biology, considerably outperforming state-of-the-art algorithms. This enables efficient autonomous knowledge discovery and facilitates self-driving virtual laboratories. Although we focus on problems within the realm of natural science, the advancements in optimization techniques achieved herein are applicable to a broader spectrum of challenges across all quantitative disciplines.
MLatom 3: Platform for machine learning-enhanced computational chemistry simulations and workflows
Oct 31, 2023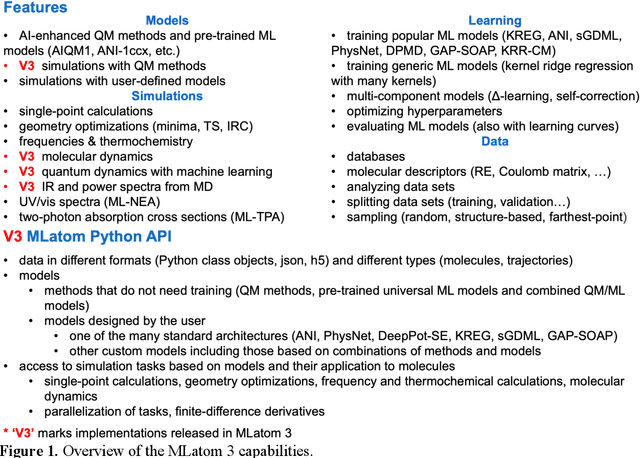
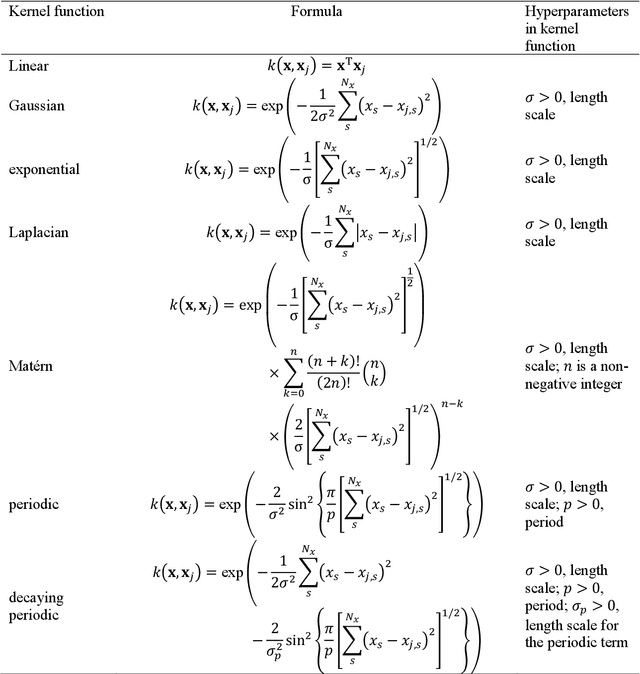
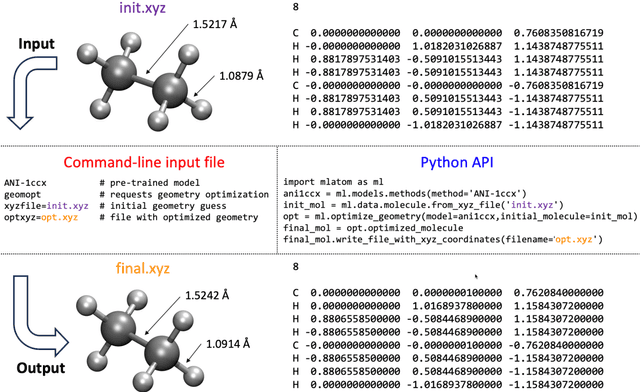
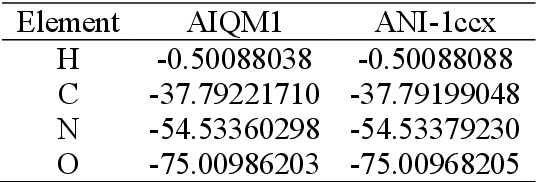
Machine learning (ML) is increasingly becoming a common tool in computational chemistry. At the same time, the rapid development of ML methods requires a flexible software framework for designing custom workflows. MLatom 3 is a program package designed to leverage the power of ML to enhance typical computational chemistry simulations and to create complex workflows. This open-source package provides plenty of choice to the users who can run simulations with the command line options, input files, or with scripts using MLatom as a Python package, both on their computers and on the online XACS cloud computing at XACScloud.com. Computational chemists can calculate energies and thermochemical properties, optimize geometries, run molecular and quantum dynamics, and simulate (ro)vibrational, one-photon UV/vis absorption, and two-photon absorption spectra with ML, quantum mechanical, and combined models. The users can choose from an extensive library of methods containing pre-trained ML models and quantum mechanical approximations such as AIQM1 approaching coupled-cluster accuracy. The developers can build their own models using various ML algorithms. The great flexibility of MLatom is largely due to the extensive use of the interfaces to many state-of-the-art software packages and libraries.