 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMetaFold: Language-Guided Multi-Category Garment Folding Framework via Trajectory Generation and Foundation Model
Paper and Code
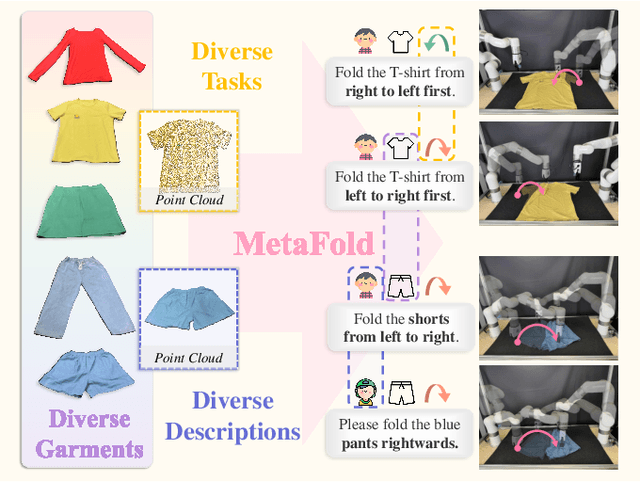
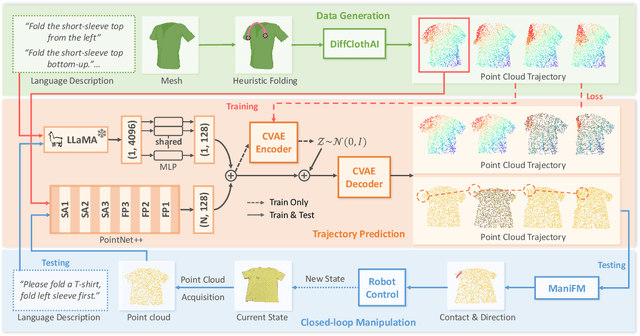
Garment folding is a common yet challenging task in robotic manipulation. The deformability of garments leads to a vast state space and complex dynamics, which complicates precise and fine-grained manipulation. Previous approaches often rely on predefined key points or demonstrations, limiting their generalization across diverse garment categories. This paper presents a framework, MetaFold, that disentangles task planning from action prediction, learning each independently to enhance model generalization. It employs language-guided point cloud trajectory generation for task planning and a low-level foundation model for action prediction. This structure facilitates multi-category learning, enabling the model to adapt flexibly to various user instructions and folding tasks. Experimental results demonstrate the superiority of our proposed framework. Supplementary materials are available on our website: https://meta-fold.github.io/.