 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Balance Motor Thermal Safety and Quadrupedal Locomotion Performance with Residual Policy
May 26, 2026Motor thermal management is often overlooked in the context of electrically-actuated robots, particularly legged robots, but motor overheating is a key factor that limits long-duration locomotion especially under payload conditions. This paper integrates a whole-body thermal model of a quadruped robot into the reinforcement learning pipeline to update motor temperatures, and proposes a two-stage training framework for motor thermal management. In this framework, a nominal policy is first pre-trained as a locomotion baseline capable of traversing diverse terrains. A residual policy is then trained on top of the nominal policy to provide corrective actions based on the robot's thermal state, ensuring high performance under low-temperature conditions and preventing motor overheating under high-temperature conditions. Simulation results demonstrate that the proposed policy achieves an effective balance between motor thermal safety and locomotion performance. Real-world experiments on a Unitree A1 quadruped robot further validate the approach: under a 3 kg payload, the robot achieves stable locomotion across multiple terrains for over 13 minutes, while the nominal policy alone leads to motor overheating in about 5 minutes.
Region-aware Spatiotemporal Modeling with Collaborative Domain Generalization for Cross-Subject EEG Emotion Recognition
Jan 22, 2026Cross-subject EEG-based emotion recognition (EER) remains challenging due to strong inter-subject variability, which induces substantial distribution shifts in EEG signals, as well as the high complexity of emotion-related neural representations in both spatial organization and temporal evolution. Existing approaches typically improve spatial modeling, temporal modeling, or generalization strategies in isolation, which limits their ability to align representations across subjects while capturing multi-scale dynamics and suppressing subject-specific bias within a unified framework. To address these gaps, we propose a Region-aware Spatiotemporal Modeling framework with Collaborative Domain Generalization (RSM-CoDG) for cross-subject EEG emotion recognition. RSM-CoDG incorporates neuroscience priors derived from functional brain region partitioning to construct region-level spatial representations, thereby improving cross-subject comparability. It also employs multi-scale temporal modeling to characterize the dynamic evolution of emotion-evoked neural activity. In addition, the framework employs a collaborative domain generalization strategy, incorporating multidimensional constraints to reduce subject-specific bias in a fully unseen target subject setting, which enhances the generalization to unknown individuals. Extensive experimental results on SEED series datasets demonstrate that RSM-CoDG consistently outperforms existing competing methods, providing an effective approach for improving robustness. The source code is available at https://github.com/RyanLi-X/RSM-CoDG.
Constraint Matters: Multi-Modal Representation for Reducing Mixed-Integer Linear programming
Aug 26, 2025Model reduction, which aims to learn a simpler model of the original mixed integer linear programming (MILP), can solve large-scale MILP problems much faster. Most existing model reduction methods are based on variable reduction, which predicts a solution value for a subset of variables. From a dual perspective, constraint reduction that transforms a subset of inequality constraints into equalities can also reduce the complexity of MILP, but has been largely ignored. Therefore, this paper proposes a novel constraint-based model reduction approach for the MILP. Constraint-based MILP reduction has two challenges: 1) which inequality constraints are critical such that reducing them can accelerate MILP solving while preserving feasibility, and 2) how to predict these critical constraints efficiently. To identify critical constraints, we first label these tight-constraints at the optimal solution as potential critical constraints and design a heuristic rule to select a subset of critical tight-constraints. To learn the critical tight-constraints, we propose a multi-modal representation technique that leverages information from both instance-level and abstract-level MILP formulations. The experimental results show that, compared to the state-of-the-art methods, our method improves the quality of the solution by over 50\% and reduces the computation time by 17.47\%.
CALM: Co-evolution of Algorithms and Language Model for Automatic Heuristic Design
May 18, 2025Tackling complex optimization problems often relies on expert-designed heuristics, typically crafted through extensive trial and error. Recent advances demonstrate that large language models (LLMs), when integrated into well-designed evolutionary search frameworks, can autonomously discover high-performing heuristics at a fraction of the traditional cost. However, existing approaches predominantly rely on verbal guidance, i.e., manipulating the prompt generation process, to steer the evolution of heuristics, without adapting the underlying LLM. We propose a hybrid framework that combines verbal and numerical guidance, the latter achieved by fine-tuning the LLM via reinforcement learning based on the quality of generated heuristics. This joint optimization allows the LLM to co-evolve with the search process. Our method outperforms state-of-the-art (SOTA) baselines across various optimization tasks, running locally on a single 24GB GPU using a 7B model with INT4 quantization. It surpasses methods that rely solely on verbal guidance, even when those use significantly more powerful API-based models.
CARE: Compatibility-Aware Incentive Mechanisms for Federated Learning with Budgeted Requesters
Apr 22, 2025Federated learning (FL) is a promising approach that allows requesters (\eg, servers) to obtain local training models from workers (e.g., clients). Since workers are typically unwilling to provide training services/models freely and voluntarily, many incentive mechanisms in FL are designed to incentivize participation by offering monetary rewards from requesters. However, existing studies neglect two crucial aspects of real-world FL scenarios. First, workers can possess inherent incompatibility characteristics (e.g., communication channels and data sources), which can lead to degradation of FL efficiency (e.g., low communication efficiency and poor model generalization). Second, the requesters are budgeted, which limits the amount of workers they can hire for their tasks. In this paper, we investigate the scenario in FL where multiple budgeted requesters seek training services from incompatible workers with private training costs. We consider two settings: the cooperative budget setting where requesters cooperate to pool their budgets to improve their overall utility and the non-cooperative budget setting where each requester optimizes their utility within their own budgets. To address efficiency degradation caused by worker incompatibility, we develop novel compatibility-aware incentive mechanisms, CARE-CO and CARE-NO, for both settings to elicit true private costs and determine workers to hire for requesters and their rewards while satisfying requester budget constraints. Our mechanisms guarantee individual rationality, truthfulness, budget feasibility, and approximation performance. We conduct extensive experiments using real-world datasets to show that the proposed mechanisms significantly outperform existing baselines.
CorrDiff: Adaptive Delay-aware Detector with Temporal Cue Inputs for Real-time Object Detection
Jan 09, 2025



Real-time object detection takes an essential part in the decision-making process of numerous real-world applications, including collision avoidance and path planning in autonomous driving systems. This paper presents a novel real-time streaming perception method named CorrDiff, designed to tackle the challenge of delays in real-time detection systems. The main contribution of CorrDiff lies in its adaptive delay-aware detector, which is able to utilize runtime-estimated temporal cues to predict objects' locations for multiple future frames, and selectively produce predictions that matches real-world time, effectively compensating for any communication and computational delays. The proposed model outperforms current state-of-the-art methods by leveraging motion estimation and feature enhancement, both for 1) single-frame detection for the current frame or the next frame, in terms of the metric mAP, and 2) the prediction for (multiple) future frame(s), in terms of the metric sAP (The sAP metric is to evaluate object detection algorithms in streaming scenarios, factoring in both latency and accuracy). It demonstrates robust performance across a range of devices, from powerful Tesla V100 to modest RTX 2080Ti, achieving the highest level of perceptual accuracy on all platforms. Unlike most state-of-the-art methods that struggle to complete computation within a single frame on less powerful devices, CorrDiff meets the stringent real-time processing requirements on all kinds of devices. The experimental results emphasize the system's adaptability and its potential to significantly improve the safety and reliability for many real-world systems, such as autonomous driving. Our code is completely open-sourced and is available at https://anonymous.4open.science/r/CorrDiff.
Fast and Interpretable Mixed-Integer Linear Program Solving by Learning Model Reduction
Dec 31, 2024



By exploiting the correlation between the structure and the solution of Mixed-Integer Linear Programming (MILP), Machine Learning (ML) has become a promising method for solving large-scale MILP problems. Existing ML-based MILP solvers mainly focus on end-to-end solution learning, which suffers from the scalability issue due to the high dimensionality of the solution space. Instead of directly learning the optimal solution, this paper aims to learn a reduced and equivalent model of the original MILP as an intermediate step. The reduced model often corresponds to interpretable operations and is much simpler, enabling us to solve large-scale MILP problems much faster than existing commercial solvers. However, current approaches rely only on the optimal reduced model, overlooking the significant preference information of all reduced models. To address this issue, this paper proposes a preference-based model reduction learning method, which considers the relative performance (i.e., objective cost and constraint feasibility) of all reduced models on each MILP instance as preferences. We also introduce an attention mechanism to capture and represent preference information, which helps improve the performance of model reduction learning tasks. Moreover, we propose a SetCover based pruning method to control the number of reduced models (i.e., labels), thereby simplifying the learning process. Evaluation on real-world MILP problems shows that 1) compared to the state-of-the-art model reduction ML methods, our method obtains nearly 20% improvement on solution accuracy, and 2) compared to the commercial solver Gurobi, two to four orders of magnitude speedups are achieved.
Transtreaming: Adaptive Delay-aware Transformer for Real-time Streaming Perception
Sep 10, 2024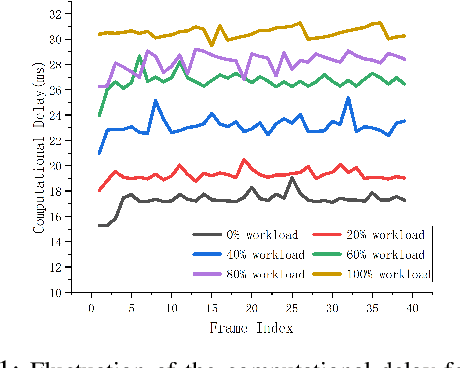



Real-time object detection is critical for the decision-making process for many real-world applications, such as collision avoidance and path planning in autonomous driving. This work presents an innovative real-time streaming perception method, Transtreaming, which addresses the challenge of real-time object detection with dynamic computational delay. The core innovation of Transtreaming lies in its adaptive delay-aware transformer, which can concurrently predict multiple future frames and select the output that best matches the real-world present time, compensating for any system-induced computation delays. The proposed model outperforms the existing state-of-the-art methods, even in single-frame detection scenarios, by leveraging a transformer-based methodology. It demonstrates robust performance across a range of devices, from powerful V100 to modest 2080Ti, achieving the highest level of perceptual accuracy on all platforms. Unlike most state-of-the-art methods that struggle to complete computation within a single frame on less powerful devices, Transtreaming meets the stringent real-time processing requirements on all kinds of devices. The experimental results emphasize the system's adaptability and its potential to significantly improve the safety and reliability for many real-world systems, such as autonomous driving.
i-Rebalance: Personalized Vehicle Repositioning for Supply Demand Balance
Jan 09, 2024



Ride-hailing platforms have been facing the challenge of balancing demand and supply. Existing vehicle reposition techniques often treat drivers as homogeneous agents and relocate them deterministically, assuming compliance with the reposition. In this paper, we consider a more realistic and driver-centric scenario where drivers have unique cruising preferences and can decide whether to take the recommendation or not on their own. We propose i-Rebalance, a personalized vehicle reposition technique with deep reinforcement learning (DRL). i-Rebalance estimates drivers' decisions on accepting reposition recommendations through an on-field user study involving 99 real drivers. To optimize supply-demand balance and enhance preference satisfaction simultaneously, i-Rebalance has a sequential reposition strategy with dual DRL agents: Grid Agent to determine the reposition order of idle vehicles, and Vehicle Agent to provide personalized recommendations to each vehicle in the pre-defined order. This sequential learning strategy facilitates more effective policy training within a smaller action space compared to traditional joint-action methods. Evaluation of real-world trajectory data shows that i-Rebalance improves driver acceptance rate by 38.07% and total driver income by 9.97%.
UAV Path Planning for Object Observation with Quality Constraints: A Dynamic Programming Approach
Dec 08, 2023



This paper addresses a UAV path planning task that seeks to observe a set of objects while satisfying the observation quality constraint. A dynamic programming algorithm is proposed that enables the UAV to observe the target objects with shortest path while subjecting to the observation quality constraint. The objects have their own facing direction and restricted observation range. With an observing order, the algorithm achieves (1+$\epsilon$)-approximation ratio in theory and runs in polynomial time. The extensive results show that the algorithm produces near-optimal solutions, the effectiveness of which is also tested and proved in the Airsim simulator, a realistic virtual environment.