 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Do Answer Tokens Read Reasoning Traces? Self-Reading Patterns in Thinking LLMs for Quantitative Reasoning
Apr 21, 2026Thinking LLMs produce reasoning traces before answering. Prior activation steering work mainly targets on shaping these traces. It remains less understood how answer tokens actually read and integrate the reasoning to produce reliable outcomes. Focusing on quantitative reasoning, we analyze the answer-to-reasoning attention and observe a benign self-reading pattern aligned with correctness, characterized by a forward drift of the reading focus along the reasoning trace and a persistent concentration on key semantic anchors, whereas incorrect solutions exhibit diffuse and irregular attention pattern. We interpret this as internal certainty during answer decoding, where the model commits to a viable solution branch and integrates key evidence. Following this, we propose a training-free steering method driven by Self-Reading Quality (SRQ) scores combining geometric metrics for process control with semantic metrics for content monitoring. SRQ selects data to build steering vectors that guide inference toward benign self-reading and away from uncertain and disorganized reading. Experiments show that our method yields consistent accuracy gains.
Every Picture Tells a Dangerous Story: Memory-Augmented Multi-Agent Jailbreak Attacks on VLMs
Apr 14, 2026The rapid evolution of Vision-Language Models (VLMs) has catalyzed unprecedented capabilities in artificial intelligence; however, this continuous modal expansion has inadvertently exposed a vastly broadened and unconstrained adversarial attack surface. Current multimodal jailbreak strategies primarily focus on surface-level pixel perturbations and typographic attacks or harmful images; however, they fail to engage with the complex semantic structures intrinsic to visual data. This leaves the vast semantic attack surface of original, natural images largely unscrutinized. Driven by the need to expose these deep-seated semantic vulnerabilities, we introduce \textbf{MemJack}, a \textbf{MEM}ory-augmented multi-agent \textbf{JA}ilbreak atta\textbf{CK} framework that explicitly leverages visual semantics to orchestrate automated jailbreak attacks. MemJack employs coordinated multi-agent cooperation to dynamically map visual entities to malicious intents, generate adversarial prompts via multi-angle visual-semantic camouflage, and utilize an Iterative Nullspace Projection (INLP) geometric filter to bypass premature latent space refusals. By accumulating and transferring successful strategies through a persistent Multimodal Experience Memory, MemJack maintains highly coherent extended multi-turn jailbreak attack interactions across different images, thereby improving the attack success rate (ASR) on new images. Extensive empirical evaluations across full, unmodified COCO val2017 images demonstrate that MemJack achieves a 71.48\% ASR against Qwen3-VL-Plus, scaling to 90\% under extended budgets. Furthermore, to catalyze future defensive alignment research, we will release \textbf{MemJack-Bench}, a comprehensive dataset comprising over 113,000 interactive multimodal jailbreak attack trajectories, establishing a vital foundation for developing inherently robust VLMs.
Heuristic Self-Paced Learning for Domain Adaptive Semantic Segmentation under Adverse Conditions
Mar 25, 2026The learning order of semantic classes significantly impacts unsupervised domain adaptation for semantic segmentation, especially under adverse weather conditions. Most existing curricula rely on handcrafted heuristics (e.g., fixed uncertainty metrics) and follow a static schedule, which fails to adapt to a model's evolving, high-dimensional training dynamics, leading to category bias. Inspired by Reinforcement Learning, we cast curriculum learning as a sequential decision problem and propose an autonomous class scheduler. This scheduler consists of two components: (i) a high-dimensional state encoder that maps the model's training status into a latent space and distills key features indicative of progress, and (ii) a category-fair policy-gradient objective that ensures balanced improvement across classes. Coupled with mixed source-target supervision, the learned class rankings direct the network's focus to the most informative classes at each stage, enabling more adaptive and dynamic learning. It is worth noting that our method achieves state-of-the-art performance on three widely used benchmarks (e.g., ACDC, Dark Zurich, and Nighttime Driving) and shows generalization ability in synthetic-to-real semantic segmentation.
Any2Any: Unified Arbitrary Modality Translation for Remote Sensing
Mar 04, 2026Multi-modal remote sensing imagery provides complementary observations of the same geographic scene, yet such observations are frequently incomplete in practice. Existing cross-modal translation methods treat each modality pair as an independent task, resulting in quadratic complexity and limited generalization to unseen modality combinations. We formulate Any-to-Any translation as inference over a shared latent representation of the scene, where different modalities correspond to partial observations of the same underlying semantics. Based on this formulation, we propose Any2Any, a unified latent diffusion framework that projects heterogeneous inputs into a geometrically aligned latent space. Such structure performs anchored latent regression with a shared backbone, decoupling modality-specific representation learning from semantic mapping. Moreover, lightweight target-specific residual adapters are used to correct systematic latent mismatches without increasing inference complexity. To support learning under sparse but connected supervision, we introduce RST-1M, the first million-scale remote sensing dataset with paired observations across five sensing modalities, providing supervision anchors for any-to-any translation. Experiments across 14 translation tasks show that Any2Any consistently outperforms pairwise translation methods and exhibits strong zero-shot generalization to unseen modality pairs. Code and models will be available at https://github.com/MiliLab/Any2Any.
A neural network for modeling human concept formation, understanding and communication
Jan 05, 2026A remarkable capability of the human brain is to form more abstract conceptual representations from sensorimotor experiences and flexibly apply them independent of direct sensory inputs. However, the computational mechanism underlying this ability remains poorly understood. Here, we present a dual-module neural network framework, the CATS Net, to bridge this gap. Our model consists of a concept-abstraction module that extracts low-dimensional conceptual representations, and a task-solving module that performs visual judgement tasks under the hierarchical gating control of the formed concepts. The system develops transferable semantic structure based on concept representations that enable cross-network knowledge transfer through conceptual communication. Model-brain fitting analyses reveal that these emergent concept spaces align with both neurocognitive semantic model and brain response structures in the human ventral occipitotemporal cortex, while the gating mechanisms mirror that in the semantic control brain network. This work establishes a unified computational framework that can offer mechanistic insights for understanding human conceptual cognition and engineering artificial systems with human-like conceptual intelligence.
SARMAE: Masked Autoencoder for SAR Representation Learning
Dec 18, 2025Synthetic Aperture Radar (SAR) imagery plays a critical role in all-weather, day-and-night remote sensing applications. However, existing SAR-oriented deep learning is constrained by data scarcity, while the physically grounded speckle noise in SAR imagery further hampers fine-grained semantic representation learning. To address these challenges, we propose SARMAE, a Noise-Aware Masked Autoencoder for self-supervised SAR representation learning. Specifically, we construct SAR-1M, the first million-scale SAR dataset, with additional paired optical images, to enable large-scale pre-training. Building upon this, we design Speckle-Aware Representation Enhancement (SARE), which injects SAR-specific speckle noise into masked autoencoders to facilitate noise-aware and robust representation learning. Furthermore, we introduce Semantic Anchor Representation Constraint (SARC), which leverages paired optical priors to align SAR features and ensure semantic consistency. Extensive experiments across multiple SAR datasets demonstrate that SARMAE achieves state-of-the-art performance on classification, detection, and segmentation tasks. Code and models will be available at https://github.com/MiliLab/SARMAE.
Rethinking Label Consistency of In-Context Learning: An Implicit Transductive Label Propagation Perspective
Dec 13, 2025Large language models (LLMs) perform in-context learning (ICL) with minimal supervised examples, which benefits various natural language processing (NLP) tasks. One of the critical research focus is the selection of prompt demonstrations. Current approaches typically employ retrieval models to select the top-K most semantically similar examples as demonstrations. However, we argue that existing methods are limited since the label consistency is not guaranteed during demonstration selection. Our cognition derives from the Bayesian view of ICL and our rethinking of ICL from the transductive label propagation perspective. We treat ICL as a transductive learning method and incorporate latent concepts from Bayesian view and deduce that similar demonstrations guide the concepts of query, with consistent labels serving as estimates. Based on this understanding, we establish a label propagation framework to link label consistency with propagation error bounds. To model label consistency, we propose a data synthesis method, leveraging both semantic and label information, and use TopK sampling with Synthetic Data (TopK-SD) to acquire demonstrations with consistent labels. TopK-SD outperforms original TopK sampling on multiple benchmarks. Our work provides a new perspective for understanding the working mechanisms within ICL.
Residual Diffusion Bridge Model for Image Restoration
Oct 27, 2025Diffusion bridge models establish probabilistic paths between arbitrary paired distributions and exhibit great potential for universal image restoration. Most existing methods merely treat them as simple variants of stochastic interpolants, lacking a unified analytical perspective. Besides, they indiscriminately reconstruct images through global noise injection and removal, inevitably distorting undegraded regions due to imperfect reconstruction. To address these challenges, we propose the Residual Diffusion Bridge Model (RDBM). Specifically, we theoretically reformulate the stochastic differential equations of generalized diffusion bridge and derive the analytical formulas of its forward and reverse processes. Crucially, we leverage the residuals from given distributions to modulate the noise injection and removal, enabling adaptive restoration of degraded regions while preserving intact others. Moreover, we unravel the fundamental mathematical essence of existing bridge models, all of which are special cases of RDBM and empirically demonstrate the optimality of our proposed models. Extensive experiments are conducted to demonstrate the state-of-the-art performance of our method both qualitatively and quantitatively across diverse image restoration tasks. Code is publicly available at https://github.com/MiliLab/RDBM.
Diagnosing and Addressing Pitfalls in KG-RAG Datasets: Toward More Reliable Benchmarking
May 29, 2025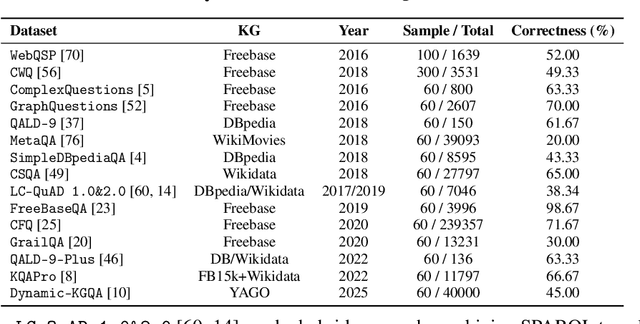
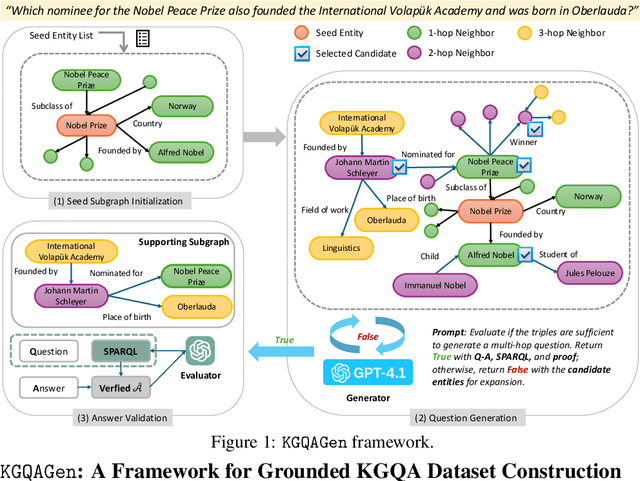

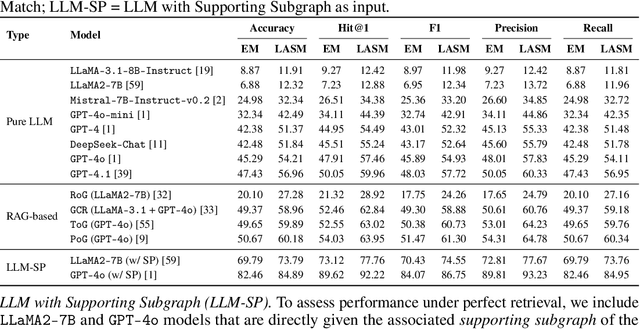
Knowledge Graph Question Answering (KGQA) systems rely on high-quality benchmarks to evaluate complex multi-hop reasoning. However, despite their widespread use, popular datasets such as WebQSP and CWQ suffer from critical quality issues, including inaccurate or incomplete ground-truth annotations, poorly constructed questions that are ambiguous, trivial, or unanswerable, and outdated or inconsistent knowledge. Through a manual audit of 16 popular KGQA datasets, including WebQSP and CWQ, we find that the average factual correctness rate is only 57 %. To address these issues, we introduce KGQAGen, an LLM-in-the-loop framework that systematically resolves these pitfalls. KGQAGen combines structured knowledge grounding, LLM-guided generation, and symbolic verification to produce challenging and verifiable QA instances. Using KGQAGen, we construct KGQAGen-10k, a ten-thousand scale benchmark grounded in Wikidata, and evaluate a diverse set of KG-RAG models. Experimental results demonstrate that even state-of-the-art systems struggle on this benchmark, highlighting its ability to expose limitations of existing models. Our findings advocate for more rigorous benchmark construction and position KGQAGen as a scalable framework for advancing KGQA evaluation.
Leader and Follower: Interactive Motion Generation under Trajectory Constraints
Feb 17, 2025



With the rapid advancement of game and film production, generating interactive motion from texts has garnered significant attention due to its potential to revolutionize content creation processes. In many practical applications, there is a need to impose strict constraints on the motion range or trajectory of virtual characters. However, existing methods that rely solely on textual input face substantial challenges in accurately capturing the user's intent, particularly in specifying the desired trajectory. As a result, the generated motions often lack plausibility and accuracy. Moreover, existing trajectory - based methods for customized motion generation rely on retraining for single - actor scenarios, which limits flexibility and adaptability to different datasets, as well as interactivity in two-actor motions. To generate interactive motion following specified trajectories, this paper decouples complex motion into a Leader - Follower dynamic, inspired by role allocation in partner dancing. Based on this framework, this paper explores the motion range refinement process in interactive motion generation and proposes a training-free approach, integrating a Pace Controller and a Kinematic Synchronization Adapter. The framework enhances the ability of existing models to generate motion that adheres to trajectory by controlling the leader's movement and correcting the follower's motion to align with the leader. Experimental results show that the proposed approach, by better leveraging trajectory information, outperforms existing methods in both realism and accuracy.