 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLongCat-Flash-Thinking-2601 Technical Report
Jan 23, 2026We introduce LongCat-Flash-Thinking-2601, a 560-billion-parameter open-source Mixture-of-Experts (MoE) reasoning model with superior agentic reasoning capability. LongCat-Flash-Thinking-2601 achieves state-of-the-art performance among open-source models on a wide range of agentic benchmarks, including agentic search, agentic tool use, and tool-integrated reasoning. Beyond benchmark performance, the model demonstrates strong generalization to complex tool interactions and robust behavior under noisy real-world environments. Its advanced capability stems from a unified training framework that combines domain-parallel expert training with subsequent fusion, together with an end-to-end co-design of data construction, environments, algorithms, and infrastructure spanning from pre-training to post-training. In particular, the model's strong generalization capability in complex tool-use are driven by our in-depth exploration of environment scaling and principled task construction. To optimize long-tailed, skewed generation and multi-turn agentic interactions, and to enable stable training across over 10,000 environments spanning more than 20 domains, we systematically extend our asynchronous reinforcement learning framework, DORA, for stable and efficient large-scale multi-environment training. Furthermore, recognizing that real-world tasks are inherently noisy, we conduct a systematic analysis and decomposition of real-world noise patterns, and design targeted training procedures to explicitly incorporate such imperfections into the training process, resulting in improved robustness for real-world applications. To further enhance performance on complex reasoning tasks, we introduce a Heavy Thinking mode that enables effective test-time scaling by jointly expanding reasoning depth and width through intensive parallel thinking.
CoUAV: A Cooperative UAV Fleet Control and Monitoring Platform
Apr 08, 2019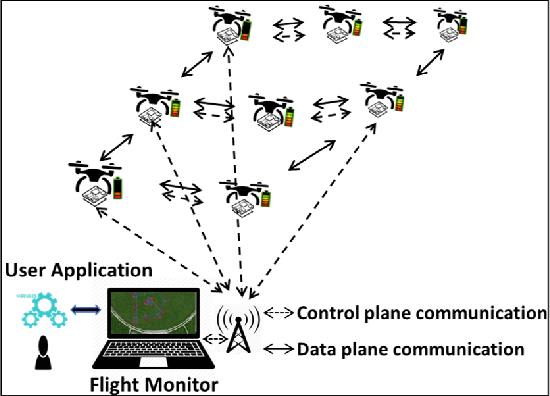
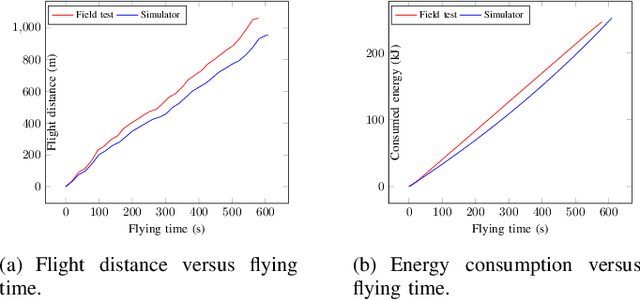
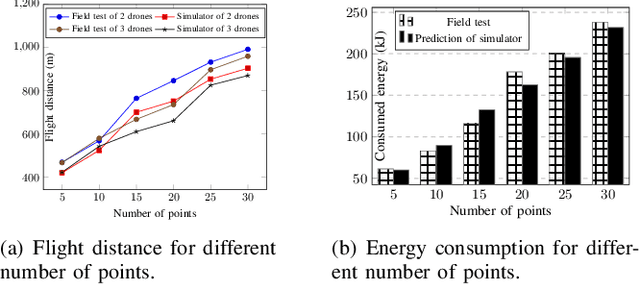
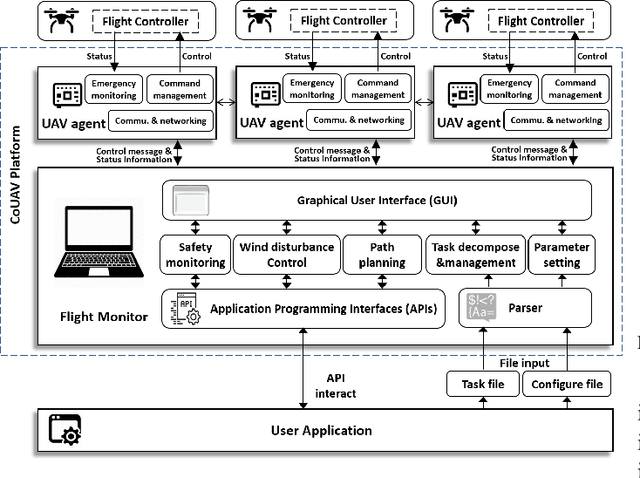
In the past decade, unmanned aerial vehicles (UAVs) have been widely used in various civilian applications, most of which only require a single UAV. In the near future, it is expected that more and more applications will be enabled by the cooperation of multiple UAVs. To facilitate such applications, it is desirable to utilize a general control platform for cooperative UAVs. However, existing open-source control platforms cannot fulfill such a demand because (1) they only support the leader-follower mode, which limits the design options for fleet control, (2) existing platforms can support only certain UAVs and thus lack of compatibility, and (3) these platforms cannot accurately simulate a flight mission, which may cause a big gap between simulation and real flight. To address these issues, we propose a general control and monitoring platform for cooperative UAV fleet, namely, CoUAV, which provides a set of core cooperation services of UAVs, including synchronization, connectivity management, path planning, energy simulation, etc. To verify the applicability of CoUAV, we design and develop a prototype and we use the new system to perform an emergency search application that aims to complete a task with the minimum flying time. To achieve this goal, we design and implement a path planning service that takes both the UAV network connectivity and coverage into consideration so as to maximize the efficiency of a fleet. Experimental results by both simulation and field test demonstrate that the proposed system is viable.