 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting and Identifying Optical Signal Attacks on Autonomous Driving Systems
Oct 20, 2021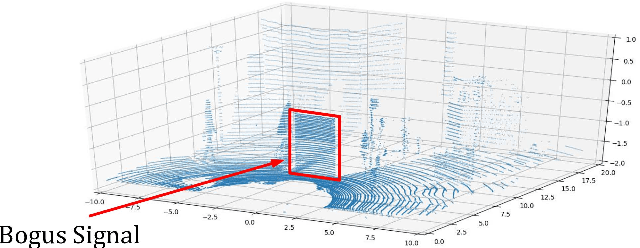

For autonomous driving, an essential task is to detect surrounding objects accurately. To this end, most existing systems use optical devices, including cameras and light detection and ranging (LiDAR) sensors, to collect environment data in real time. In recent years, many researchers have developed advanced machine learning models to detect surrounding objects. Nevertheless, the aforementioned optical devices are vulnerable to optical signal attacks, which could compromise the accuracy of object detection. To address this critical issue, we propose a framework to detect and identify sensors that are under attack. Specifically, we first develop a new technique to detect attacks on a system that consists of three sensors. Our main idea is to: 1) use data from three sensors to obtain two versions of depth maps (i.e., disparity) and 2) detect attacks by analyzing the distribution of disparity errors. In our study, we use real data sets and the state-of-the-art machine learning model to evaluate our attack detection scheme and the results confirm the effectiveness of our detection method. Based on the detection scheme, we further develop an identification model that is capable of identifying up to n-2 attacked sensors in a system with one LiDAR and n cameras. We prove the correctness of our identification scheme and conduct experiments to show the accuracy of our identification method. Finally, we investigate the overall sensitivity of our framework.
Evaluating Adversarial Attacks on Driving Safety in Vision-Based Autonomous Vehicles
Aug 06, 2021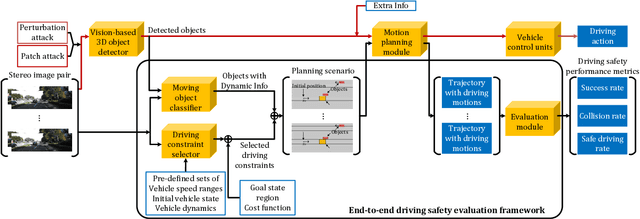

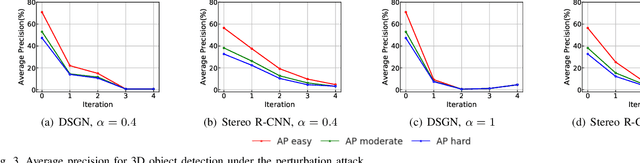
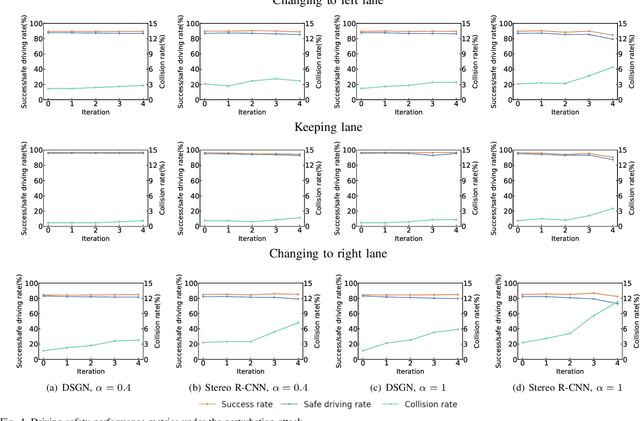
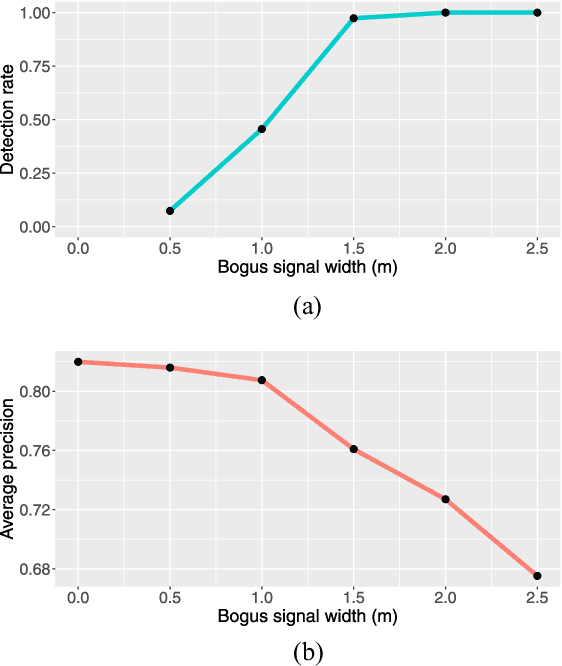
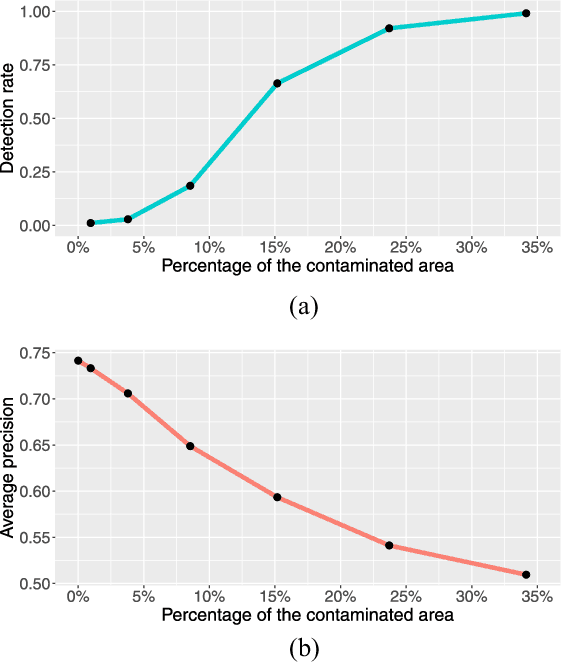
In recent years, many deep learning models have been adopted in autonomous driving. At the same time, these models introduce new vulnerabilities that may compromise the safety of autonomous vehicles. Specifically, recent studies have demonstrated that adversarial attacks can cause a significant decline in detection precision of deep learning-based 3D object detection models. Although driving safety is the ultimate concern for autonomous driving, there is no comprehensive study on the linkage between the performance of deep learning models and the driving safety of autonomous vehicles under adversarial attacks. In this paper, we investigate the impact of two primary types of adversarial attacks, perturbation attacks and patch attacks, on the driving safety of vision-based autonomous vehicles rather than the detection precision of deep learning models. In particular, we consider two state-of-the-art models in vision-based 3D object detection, Stereo R-CNN and DSGN. To evaluate driving safety, we propose an end-to-end evaluation framework with a set of driving safety performance metrics. By analyzing the results of our extensive evaluation experiments, we find that (1) the attack's impact on the driving safety of autonomous vehicles and the attack's impact on the precision of 3D object detectors are decoupled, and (2) the DSGN model demonstrates stronger robustness to adversarial attacks than the Stereo R-CNN model. In addition, we further investigate the causes behind the two findings with an ablation study. The findings of this paper provide a new perspective to evaluate adversarial attacks and guide the selection of deep learning models in autonomous driving.
Multi-Agent Reinforcement Learning Based Coded Computation for Mobile Ad Hoc Computing
Apr 15, 2021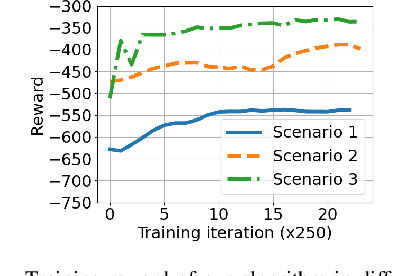
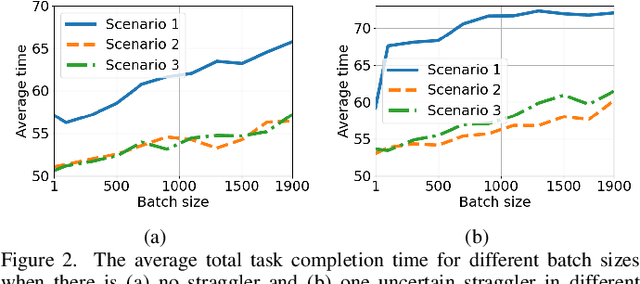
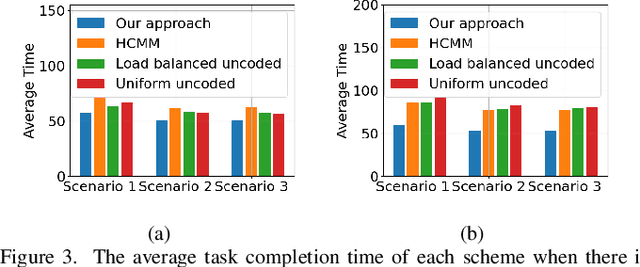
Mobile ad hoc computing (MAHC), which allows mobile devices to directly share their computing resources, is a promising solution to address the growing demands for computing resources required by mobile devices. However, offloading a computation task from a mobile device to other mobile devices is a challenging task due to frequent topology changes and link failures because of node mobility, unstable and unknown communication environments, and the heterogeneous nature of these devices. To address these challenges, in this paper, we introduce a novel coded computation scheme based on multi-agent reinforcement learning (MARL), which has many promising features such as adaptability to network changes, high efficiency and robustness to uncertain system disturbances, consideration of node heterogeneity, and decentralized load allocation. Comprehensive simulation studies demonstrate that the proposed approach can outperform state-of-the-art distributed computing schemes.
A Learning-based Discretionary Lane-Change Decision-Making Model with Driving Style Awareness
Oct 19, 2020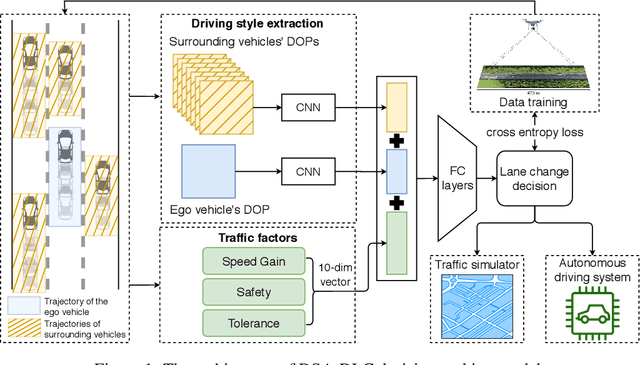

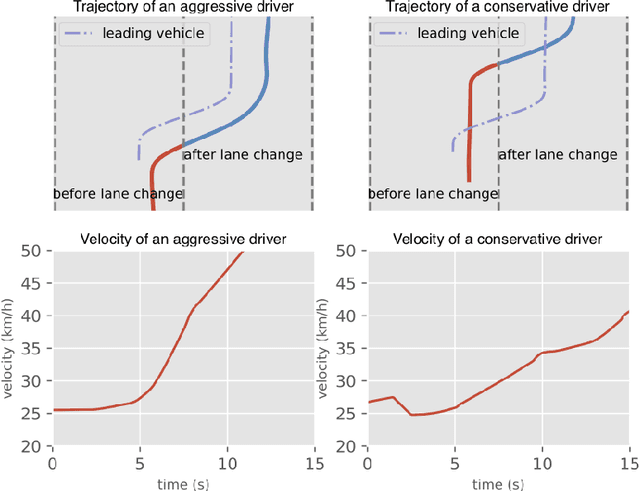
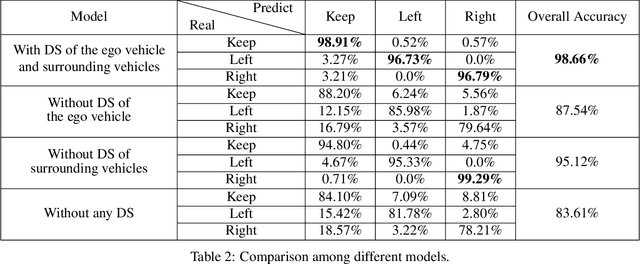
Discretionary lane change (DLC) is a basic but complex maneuver in driving, which aims at reaching a faster speed or better driving conditions, e.g., further line of sight or better ride quality. Although many DLC decision-making models have been studied in traffic engineering and autonomous driving, the impact of human factors, which is an integral part of current and future traffic flow, is largely ignored in the existing literature. In autonomous driving, the ignorance of human factors of surrounding vehicles will lead to poor interaction between the ego vehicle and the surrounding vehicles, thus, a high risk of accidents. The human factors are also a crucial part to simulate a human-like traffic flow in the traffic engineering area. In this paper, we integrate the human factors that are represented by driving styles to design a new DLC decision-making model. Specifically, our proposed model takes not only the contextual traffic information but also the driving styles of surrounding vehicles into consideration and makes lane-change/keep decisions. Moreover, the model can imitate human drivers' decision-making maneuvers to the greatest extent by learning the driving style of the ego vehicle. Our evaluation results show that the proposed model almost follows the human decision-making maneuvers, which can achieve 98.66% prediction accuracy with respect to human drivers' decisions against the ground truth. Besides, the lane-change impact analysis results demonstrate that our model even performs better than human drivers in terms of improving the safety and speed of traffic.
CoUAV: A Cooperative UAV Fleet Control and Monitoring Platform
Apr 08, 2019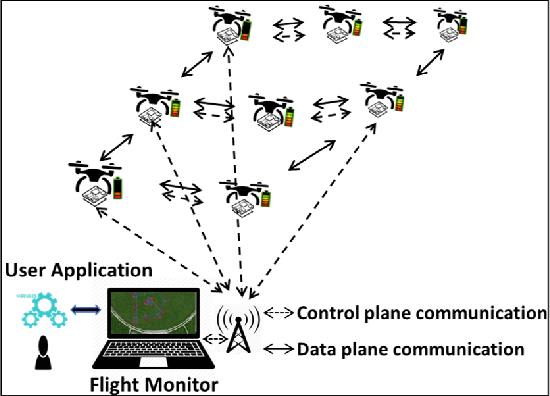
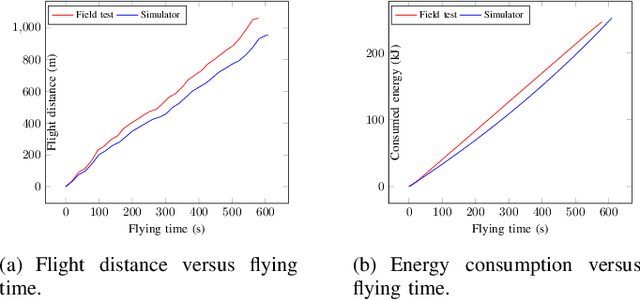
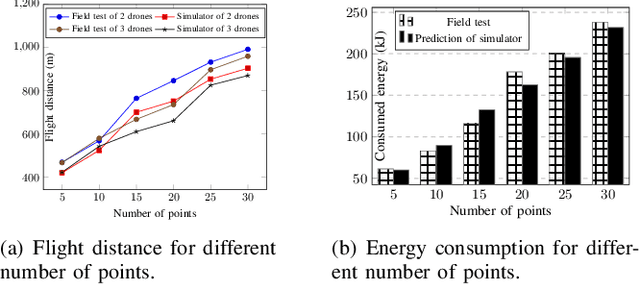
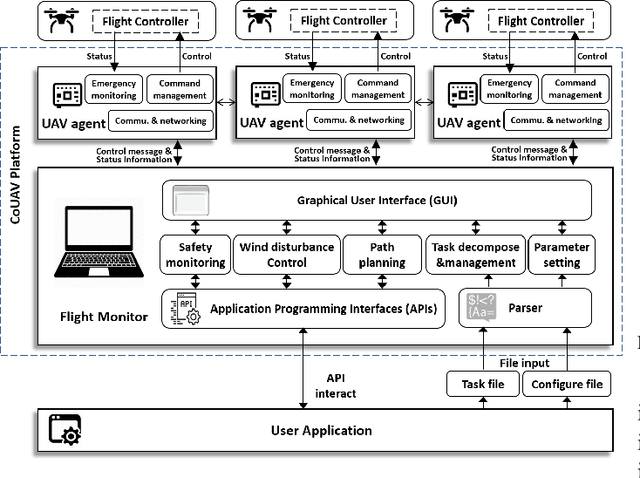
In the past decade, unmanned aerial vehicles (UAVs) have been widely used in various civilian applications, most of which only require a single UAV. In the near future, it is expected that more and more applications will be enabled by the cooperation of multiple UAVs. To facilitate such applications, it is desirable to utilize a general control platform for cooperative UAVs. However, existing open-source control platforms cannot fulfill such a demand because (1) they only support the leader-follower mode, which limits the design options for fleet control, (2) existing platforms can support only certain UAVs and thus lack of compatibility, and (3) these platforms cannot accurately simulate a flight mission, which may cause a big gap between simulation and real flight. To address these issues, we propose a general control and monitoring platform for cooperative UAV fleet, namely, CoUAV, which provides a set of core cooperation services of UAVs, including synchronization, connectivity management, path planning, energy simulation, etc. To verify the applicability of CoUAV, we design and develop a prototype and we use the new system to perform an emergency search application that aims to complete a task with the minimum flying time. To achieve this goal, we design and implement a path planning service that takes both the UAV network connectivity and coverage into consideration so as to maximize the efficiency of a fleet. Experimental results by both simulation and field test demonstrate that the proposed system is viable.