 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating Link Flows in Road Networks with Synthetic Trajectory Data Generation: Reinforcement Learning-based Approaches
Jun 26, 2022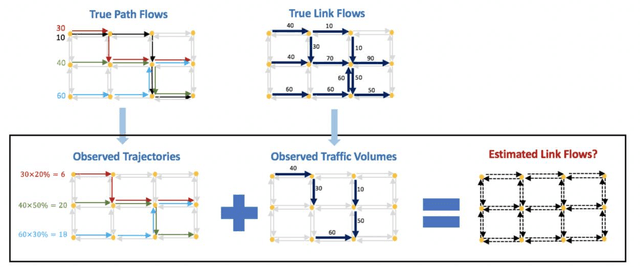
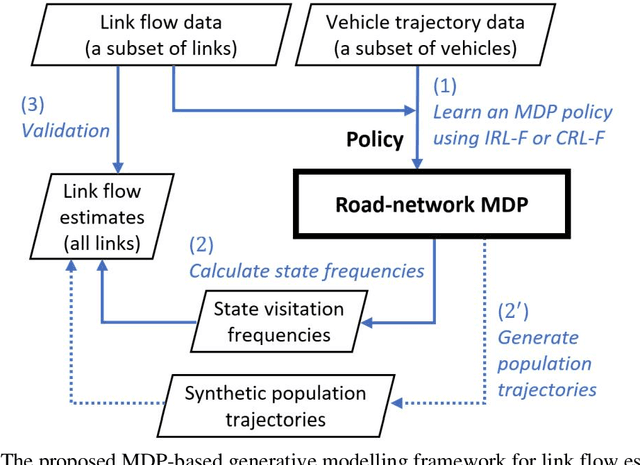
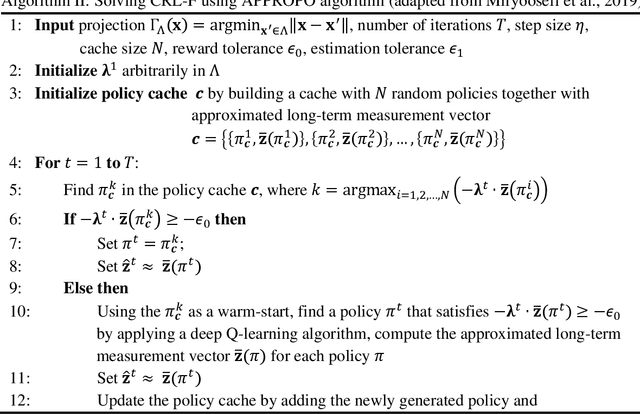
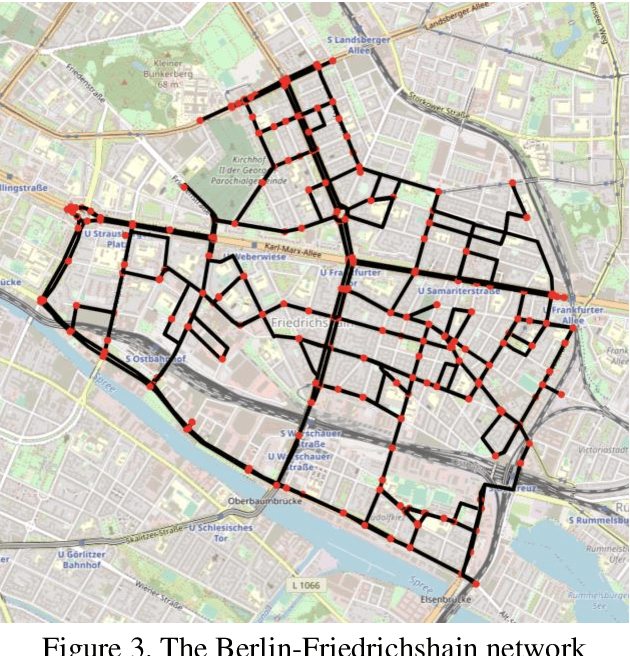
This paper addresses the problem of estimating link flows in a road network by combining limited traffic volume and vehicle trajectory data. While traffic volume data from loop detectors have been the common data source for link flow estimation, the detectors only cover a subset of links. Vehicle trajectory data collected from vehicle tracking sensors are also incorporated these days. However, trajectory data are often sparse in that the observed trajectories only represent a small subset of the whole population, where the exact sampling rate is unknown and may vary over space and time. This study proposes a novel generative modelling framework, where we formulate the link-to-link movements of a vehicle as a sequential decision-making problem using the Markov Decision Process framework and train an agent to make sequential decisions to generate realistic synthetic vehicle trajectories. We use Reinforcement Learning (RL)-based methods to find the best behaviour of the agent, based on which synthetic population vehicle trajectories can be generated to estimate link flows across the whole network. To ensure the generated population vehicle trajectories are consistent with the observed traffic volume and trajectory data, two methods based on Inverse Reinforcement Learning and Constrained Reinforcement Learning are proposed. The proposed generative modelling framework solved by either of these RL-based methods is validated by solving the link flow estimation problem in a real road network. Additionally, we perform comprehensive experiments to compare the performance with two existing methods. The results show that the proposed framework has higher estimation accuracy and robustness under realistic scenarios where certain behavioural assumptions about drivers are not met or the network coverage and penetration rate of trajectory data are low.
A Generative Car-following Model Conditioned On Driving Styles
Dec 10, 2021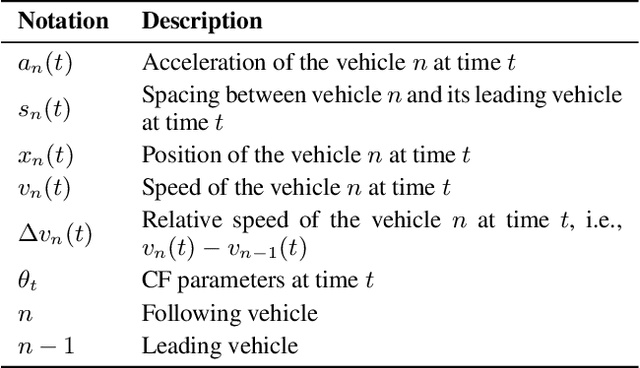
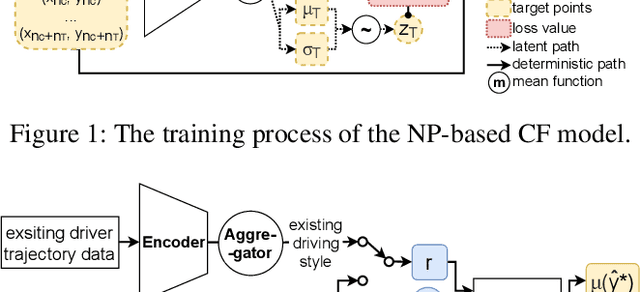
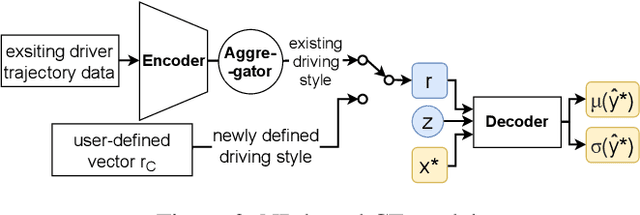
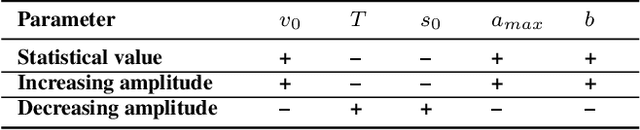
Car-following (CF) modeling, an essential component in simulating human CF behaviors, has attracted increasing research interest in the past decades. This paper pushes the state of the art by proposing a novel generative hybrid CF model, which achieves high accuracy in characterizing dynamic human CF behaviors and is able to generate realistic human CF behaviors for any given observed or even unobserved driving style. Specifically, the ability of accurately capturing human CF behaviors is ensured by designing and calibrating an Intelligent Driver Model (IDM) with time-varying parameters. The reason behind is that such time-varying parameters can express both the inter-driver heterogeneity, i.e., diverse driving styles of different drivers, and the intra-driver heterogeneity, i.e., changing driving styles of the same driver. The ability of generating realistic human CF behaviors of any given observed driving style is achieved by applying a neural process (NP) based model. The ability of inferring CF behaviors of unobserved driving styles is supported by exploring the relationship between the calibrated time-varying IDM parameters and an intermediate variable of NP. To demonstrate the effectiveness of our proposed models, we conduct extensive experiments and comparisons, including CF model parameter calibration, CF behavior prediction, and trajectory simulation for different driving styles.
A Learning-based Discretionary Lane-Change Decision-Making Model with Driving Style Awareness
Oct 19, 2020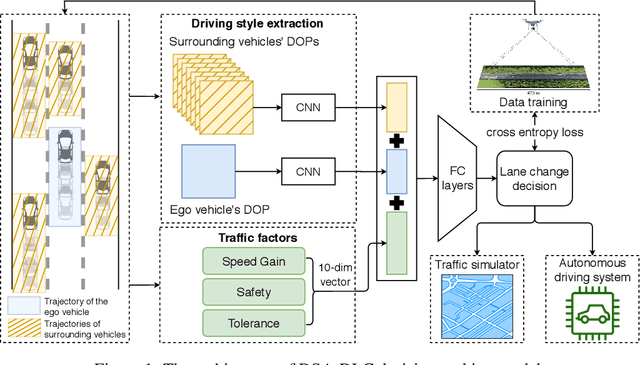

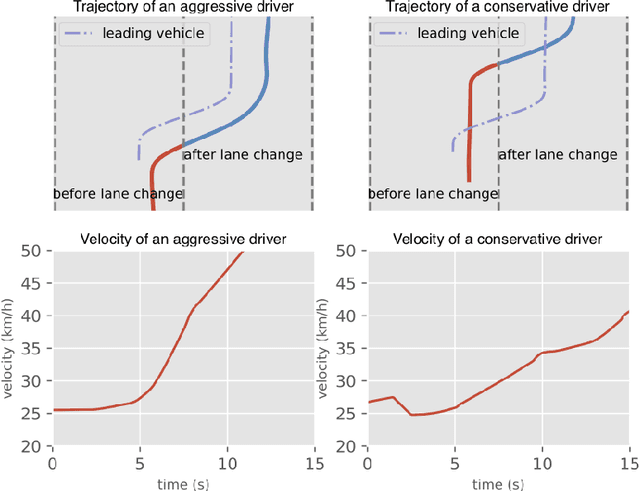
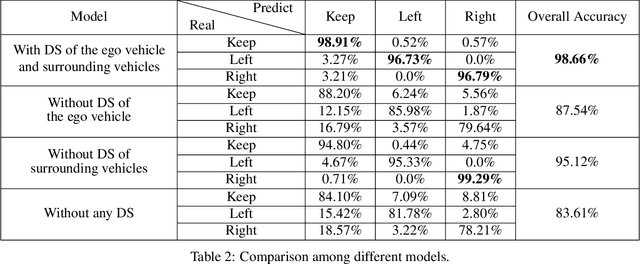
Discretionary lane change (DLC) is a basic but complex maneuver in driving, which aims at reaching a faster speed or better driving conditions, e.g., further line of sight or better ride quality. Although many DLC decision-making models have been studied in traffic engineering and autonomous driving, the impact of human factors, which is an integral part of current and future traffic flow, is largely ignored in the existing literature. In autonomous driving, the ignorance of human factors of surrounding vehicles will lead to poor interaction between the ego vehicle and the surrounding vehicles, thus, a high risk of accidents. The human factors are also a crucial part to simulate a human-like traffic flow in the traffic engineering area. In this paper, we integrate the human factors that are represented by driving styles to design a new DLC decision-making model. Specifically, our proposed model takes not only the contextual traffic information but also the driving styles of surrounding vehicles into consideration and makes lane-change/keep decisions. Moreover, the model can imitate human drivers' decision-making maneuvers to the greatest extent by learning the driving style of the ego vehicle. Our evaluation results show that the proposed model almost follows the human decision-making maneuvers, which can achieve 98.66% prediction accuracy with respect to human drivers' decisions against the ground truth. Besides, the lane-change impact analysis results demonstrate that our model even performs better than human drivers in terms of improving the safety and speed of traffic.