 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Generative Car-following Model Conditioned On Driving Styles
Paper and Code
Dec 10, 2021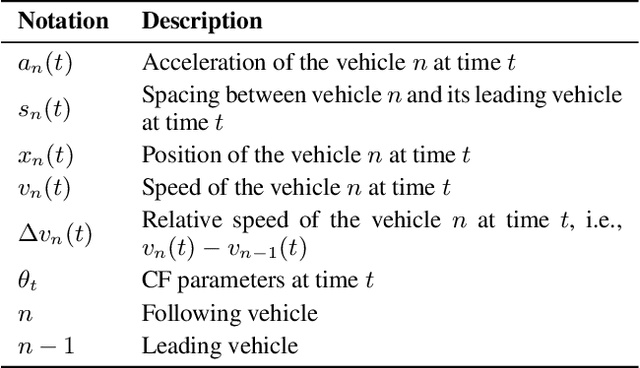
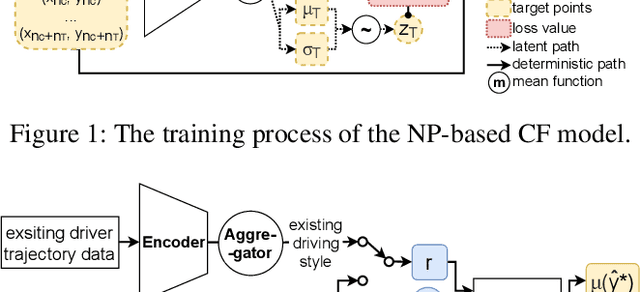
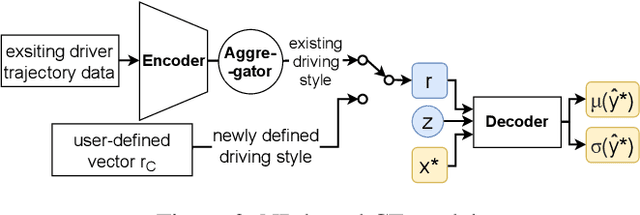
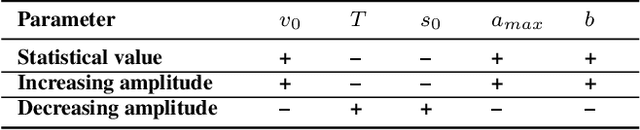
Car-following (CF) modeling, an essential component in simulating human CF behaviors, has attracted increasing research interest in the past decades. This paper pushes the state of the art by proposing a novel generative hybrid CF model, which achieves high accuracy in characterizing dynamic human CF behaviors and is able to generate realistic human CF behaviors for any given observed or even unobserved driving style. Specifically, the ability of accurately capturing human CF behaviors is ensured by designing and calibrating an Intelligent Driver Model (IDM) with time-varying parameters. The reason behind is that such time-varying parameters can express both the inter-driver heterogeneity, i.e., diverse driving styles of different drivers, and the intra-driver heterogeneity, i.e., changing driving styles of the same driver. The ability of generating realistic human CF behaviors of any given observed driving style is achieved by applying a neural process (NP) based model. The ability of inferring CF behaviors of unobserved driving styles is supported by exploring the relationship between the calibrated time-varying IDM parameters and an intermediate variable of NP. To demonstrate the effectiveness of our proposed models, we conduct extensive experiments and comparisons, including CF model parameter calibration, CF behavior prediction, and trajectory simulation for different driving styles.