 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating Link Flows in Road Networks with Synthetic Trajectory Data Generation: Reinforcement Learning-based Approaches
Jun 26, 2022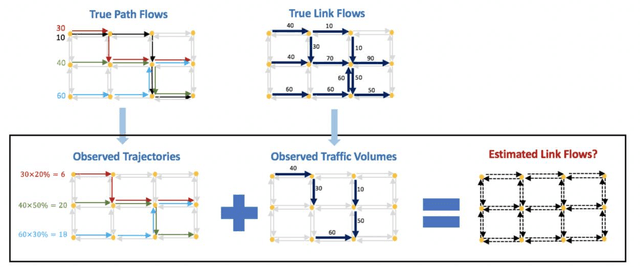
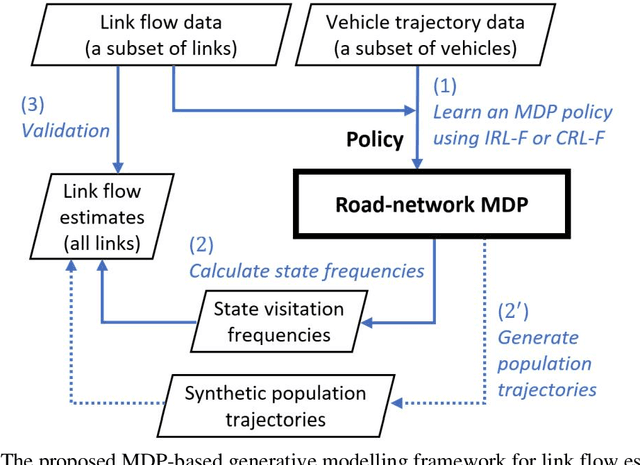
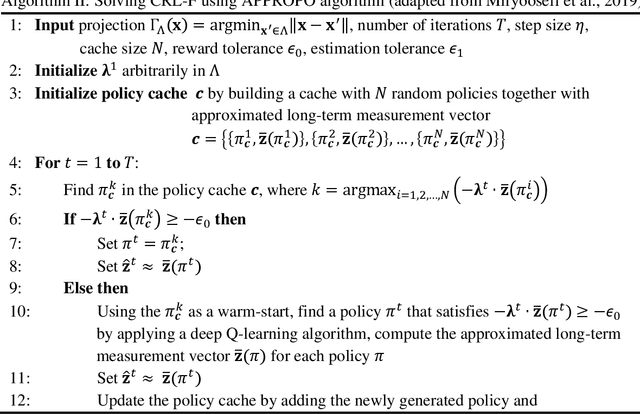
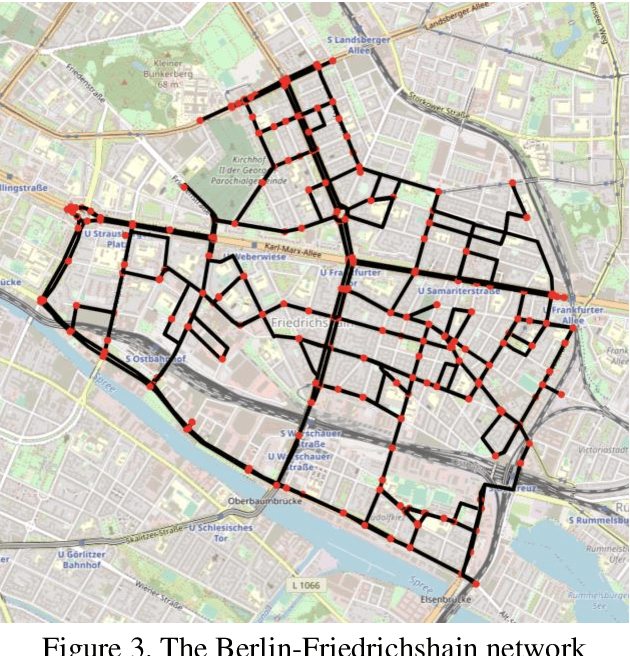
This paper addresses the problem of estimating link flows in a road network by combining limited traffic volume and vehicle trajectory data. While traffic volume data from loop detectors have been the common data source for link flow estimation, the detectors only cover a subset of links. Vehicle trajectory data collected from vehicle tracking sensors are also incorporated these days. However, trajectory data are often sparse in that the observed trajectories only represent a small subset of the whole population, where the exact sampling rate is unknown and may vary over space and time. This study proposes a novel generative modelling framework, where we formulate the link-to-link movements of a vehicle as a sequential decision-making problem using the Markov Decision Process framework and train an agent to make sequential decisions to generate realistic synthetic vehicle trajectories. We use Reinforcement Learning (RL)-based methods to find the best behaviour of the agent, based on which synthetic population vehicle trajectories can be generated to estimate link flows across the whole network. To ensure the generated population vehicle trajectories are consistent with the observed traffic volume and trajectory data, two methods based on Inverse Reinforcement Learning and Constrained Reinforcement Learning are proposed. The proposed generative modelling framework solved by either of these RL-based methods is validated by solving the link flow estimation problem in a real road network. Additionally, we perform comprehensive experiments to compare the performance with two existing methods. The results show that the proposed framework has higher estimation accuracy and robustness under realistic scenarios where certain behavioural assumptions about drivers are not met or the network coverage and penetration rate of trajectory data are low.