 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVersatile Distributed Maneuvering with Generalized Formations using Guiding Vector Fields
May 09, 2025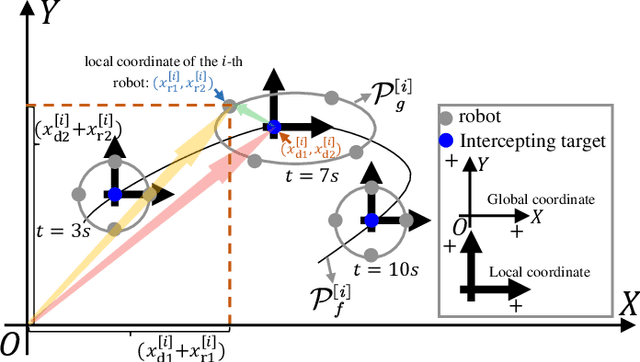
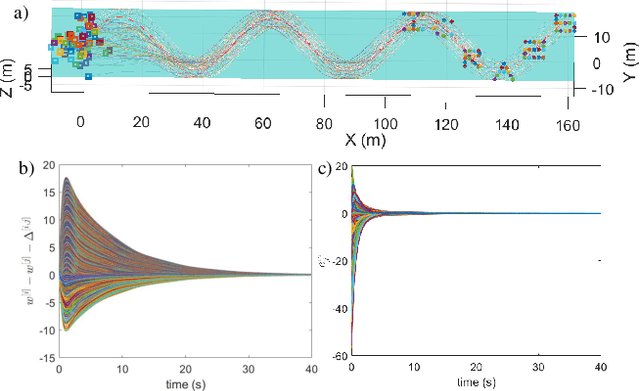
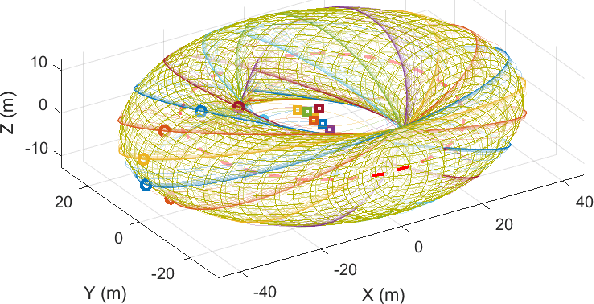
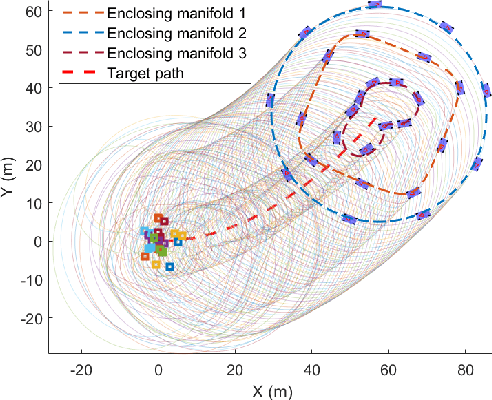
This paper presents a unified approach to realize versatile distributed maneuvering with generalized formations. Specifically, we decompose the robots' maneuvers into two independent components, i.e., interception and enclosing, which are parameterized by two independent virtual coordinates. Treating these two virtual coordinates as dimensions of an abstract manifold, we derive the corresponding singularity-free guiding vector field (GVF), which, along with a distributed coordination mechanism based on the consensus theory, guides robots to achieve various motions (i.e., versatile maneuvering), including (a) formation tracking, (b) target enclosing, and (c) circumnavigation. Additional motion parameters can generate more complex cooperative robot motions. Based on GVFs, we design a controller for a nonholonomic robot model. Besides the theoretical results, extensive simulations and experiments are performed to validate the effectiveness of the approach.
Concurrent-Allocation Task Execution for Multi-Robot Path-Crossing-Minimal Navigation in Obstacle Environments
Apr 12, 2025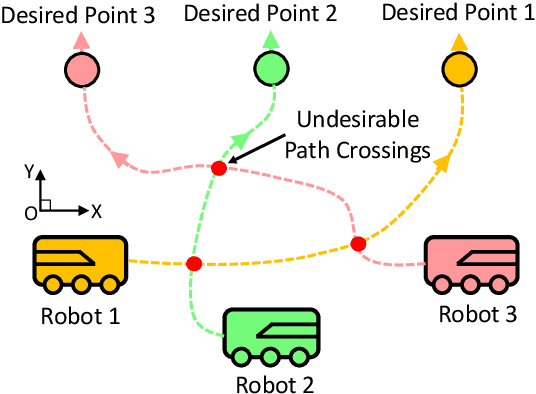
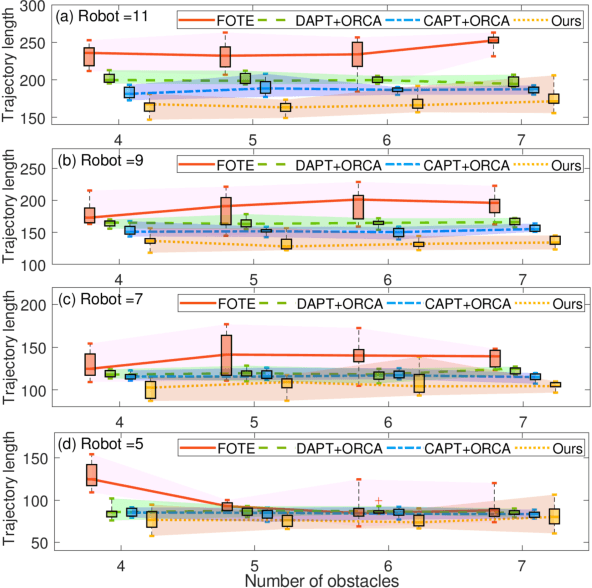
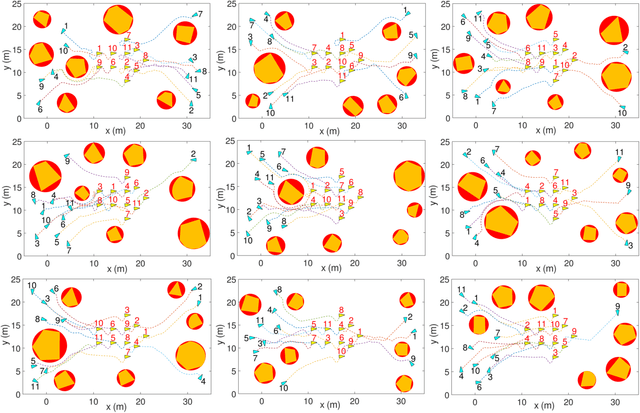
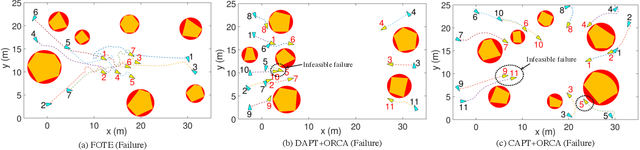
Reducing undesirable path crossings among trajectories of different robots is vital in multi-robot navigation missions, which not only reduces detours and conflict scenarios, but also enhances navigation efficiency and boosts productivity. Despite recent progress in multi-robot path-crossing-minimal (MPCM) navigation, the majority of approaches depend on the minimal squared-distance reassignment of suitable desired points to robots directly. However, if obstacles occupy the passing space, calculating the actual robot-point distances becomes complex or intractable, which may render the MPCM navigation in obstacle environments inefficient or even infeasible. In this paper, the concurrent-allocation task execution (CATE) algorithm is presented to address this problem (i.e., MPCM navigation in obstacle environments). First, the path-crossing-related elements in terms of (i) robot allocation, (ii) desired-point convergence, and (iii) collision and obstacle avoidance are encoded into integer and control barrier function (CBF) constraints. Then, the proposed constraints are used in an online constrained optimization framework, which implicitly yet effectively minimizes the possible path crossings and trajectory length in obstacle environments by minimizing the desired point allocation cost and slack variables in CBF constraints simultaneously. In this way, the MPCM navigation in obstacle environments can be achieved with flexible spatial orderings. Note that the feasibility of solutions and the asymptotic convergence property of the proposed CATE algorithm in obstacle environments are both guaranteed, and the calculation burden is also reduced by concurrently calculating the optimal allocation and the control input directly without the path planning process.
Inverse Kinematics on Guiding Vector Fields for Robot Path Following
Feb 24, 2025
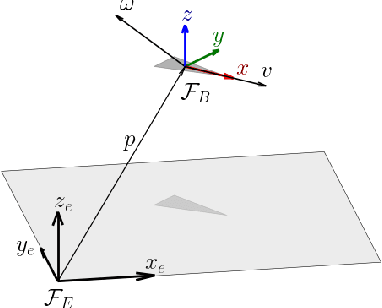
Inverse kinematics is a fundamental technique for motion and positioning control in robotics, typically applied to end-effectors. In this paper, we extend the concept of inverse kinematics to guiding vector fields for path following in autonomous mobile robots. The desired path is defined by its implicit equation, i.e., by a collection of points belonging to one or more zero-level sets. These level sets serve as a reference to construct an error signal that drives the guiding vector field toward the desired path, enabling the robot to converge and travel along the path by following such a vector field. We start with the formal exposition on how inverse kinematics can be applied to guiding vector fields for single-integrator robots in an m-dimensional Euclidean space. Then, we leverage inverse kinematics to ensure that the level-set error signal behaves as a linear system, facilitating control over the robot's transient motion toward the desired path and allowing for the injection of feed-forward signals to induce precise motion behavior along the path. We then propose solutions to the theoretical and practical challenges of applying this technique to unicycles with constant speeds to follow 2D paths with precise transient control. We finish by validating the predicted theoretical results through real flights with fixed-wing drones.
HI-GVF: Shared Control based on Human-Influenced Guiding Vector Fields for Human-multi-robot Cooperation
Feb 17, 2025
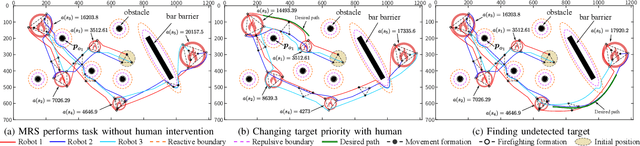
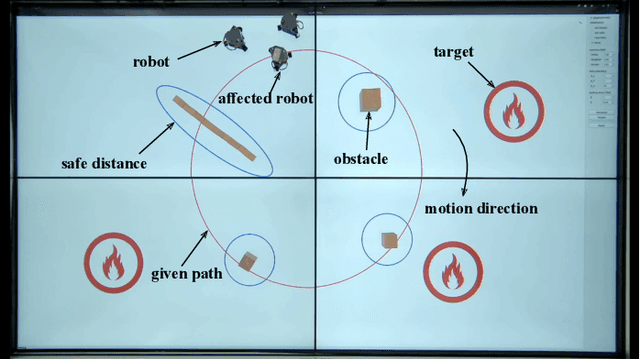
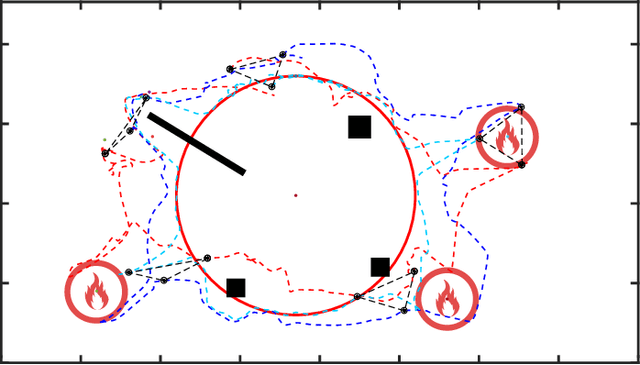
Human-multi-robot shared control leverages human decision-making and robotic autonomy to enhance human-robot collaboration. While widely studied, existing systems often adopt a leader-follower model, limiting robot autonomy to some extent. Besides, a human is required to directly participate in the motion control of robots through teleoperation, which significantly burdens the operator. To alleviate these two issues, we propose a layered shared control computing framework using human-influenced guiding vector fields (HI-GVF) for human-robot collaboration. HI-GVF guides the multi-robot system along a desired path specified by the human. Then, an intention field is designed to merge the human and robot intentions, accelerating the propagation of the human intention within the multi-robot system. Moreover, we give the stability analysis of the proposed model and use collision avoidance based on safety barrier certificates to fine-tune the velocity. Eventually, considering the firefighting task as an example scenario, we conduct simulations and experiments using multiple human-robot interfaces (brain-computer interface, myoelectric wristband, eye-tracking), and the results demonstrate that our proposed approach boosts the effectiveness and performance of the task.
Fully distributed and resilient source seeking for robot swarms
Oct 21, 2024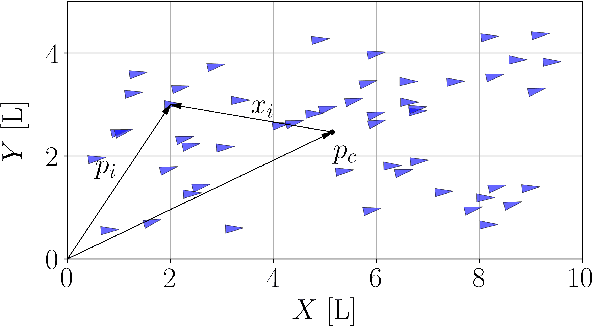
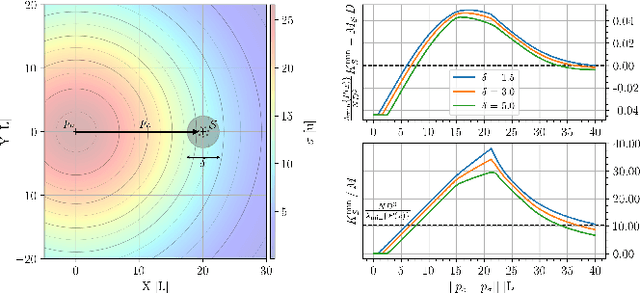
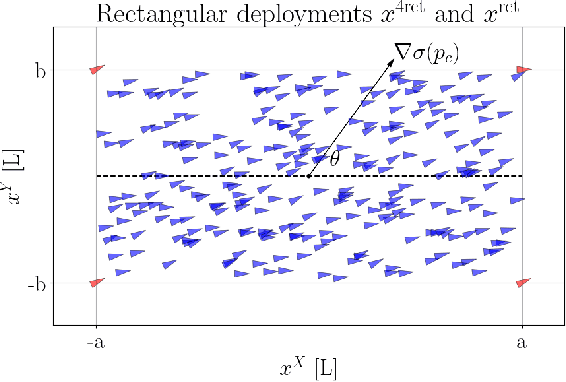
We propose a self-contained, resilient and fully distributed solution for locating the maximum of an unknown 3D scalar field using a swarm of robots that travel at constant speeds. Unlike conventional reactive methods relying on gradient information, our methodology enables the swarm to determine an ascending direction so that it approaches the source with arbitrary precision. Our source-seeking solution consists of three algorithms. The first two algorithms run sequentially and distributively at a high frequency providing barycentric coordinates and the ascending direction respectively to the individual robots. The third algorithm is the individual control law for a robot to track the estimated ascending direction. We show that the two algorithms with higher frequency have an exponential convergence to their eventual values since they are based on the standard consensus protocol for first-order dynamical systems; their high frequency depends on how fast the robots travel through the scalar field. The robots are not constrained to any particular geometric formation, and we study both discrete and continuous distributions of robots within swarm shapes. The shape analysis reveals the resiliency of our approach as expected in robot swarms, i.e., by amassing robots we ensure the source-seeking functionality in the event of missing or misplaced individuals or even if the robot network splits into two or more disconnected subnetworks. In addition, we also enhance the robustness of the algorithm by presenting conditions for \emph{optimal} swarm shapes, in the sense that the ascending directions can be closely parallel to the field's gradient. We exploit such an analysis so that the swarm can adapt to unknown environments by morphing its shape and maneuvering while still following an ascending direction.
DVRP-MHSI: Dynamic Visualization Research Platform for Multimodal Human-Swarm Interaction
Aug 20, 2024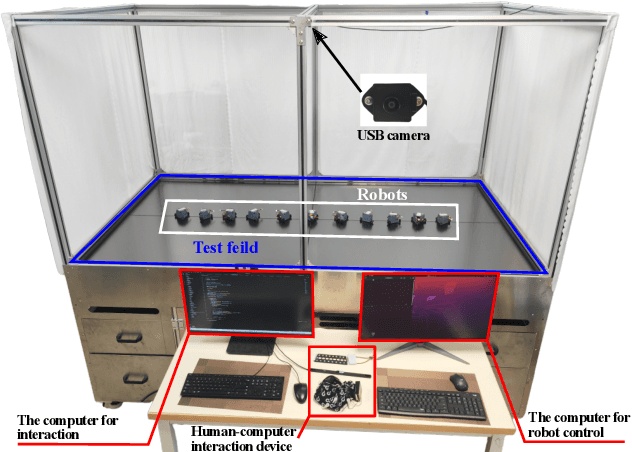
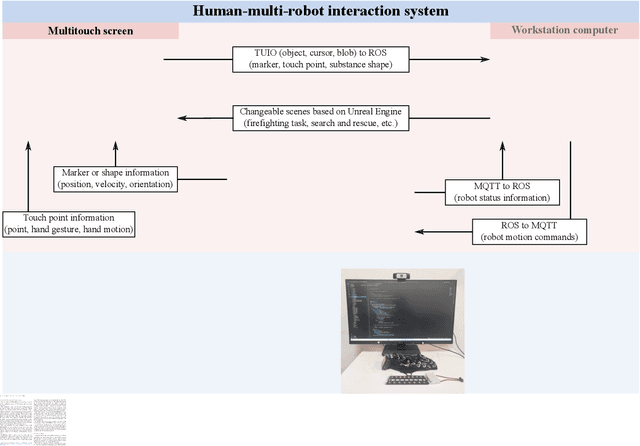
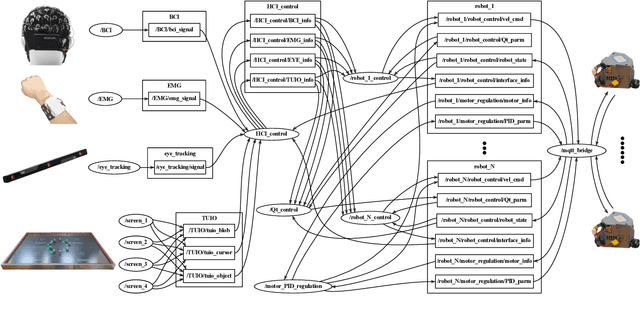
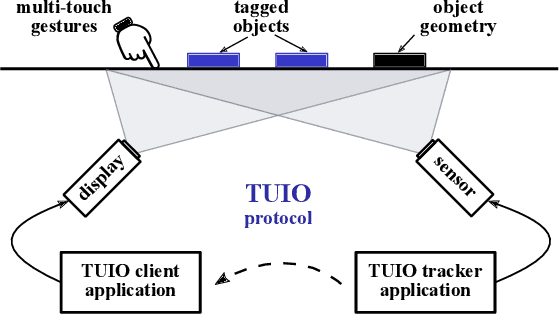
In recent years, there has been a significant amount of research on algorithms and control methods for distributed collaborative robots. However, the emergence of collective behavior in a swarm is still difficult to predict and control. Nevertheless, human interaction with the swarm helps render the swarm more predictable and controllable, as human operators can utilize intuition or knowledge that is not always available to the swarm. Therefore, this paper designs the Dynamic Visualization Research Platform for Multimodal Human-Swarm Interaction (DVRP-MHSI), which is an innovative open system that can perform real-time dynamic visualization and is specifically designed to accommodate a multitude of interaction modalities (such as brain-computer, eye-tracking, electromyographic, and touch-based interfaces), thereby expediting progress in human-swarm interaction research. Specifically, the platform consists of custom-made low-cost omnidirectional wheeled mobile robots, multitouch screens and two workstations. In particular, the mutitouch screens can recognize human gestures and the shapes of objects placed on them, and they can also dynamically render diverse scenes. One of the workstations processes communication information within robots and the other one implements human-robot interaction methods. The development of DVRP-MHSI frees researchers from hardware or software details and allows them to focus on versatile swarm algorithms and human-swarm interaction methods without being limited to fixed scenarios, tasks, and interfaces. The effectiveness and potential of the platform for human-swarm interaction studies are validated by several demonstrative experiments.
Vector Field-Guided Learning Predictive Control for Motion Planning of Mobile Robots with Unknown Dynamics
May 14, 2024Safe maneuvering capability is critical for mobile robots in complex environments. However, robotic system dynamics are often time-varying, uncertain, or even unknown during the motion planning and control process. Therefore, many existing model-based reinforcement learning (RL) methods could not achieve satisfactory reliability in guaranteeing safety. To address this challenge, we propose a two-level Vector Field-guided Learning Predictive Control (VF-LPC) approach that guarantees safe maneuverability. The first level, the guiding level, generates safe desired trajectories using the designed kinodynamic guiding vector field, enabling safe motion in obstacle-dense environments. The second level, the Integrated Motion Planning and Control (IMPC) level, first uses the deep Koopman operator to learn a nominal dynamics model offline and then updates the model uncertainties online using sparse Gaussian processes (GPs). The learned dynamics and game-based safe barrier function are then incorporated into the learning predictive control framework to generate near-optimal control sequences. We conducted tests to compare the performance of VF-LPC with existing advanced planning methods in an obstacle-dense environment. The simulation results show that it can generate feasible trajectories quickly. Then, VF-LPC is evaluated against motion planning methods that employ model predictive control (MPC) and RL in high-fidelity CarSim software. The results show that VF-LPC outperforms them under metrics of completion time, route length, and average solution time. We also carried out path-tracking control tests on a racing road to validate the model uncertainties learning capability. Finally, we conducted real-world experiments on a Hongqi E-HS3 vehicle, further validating the VF-LPC approach's effectiveness.
Coordinated Guiding Vector Field Design for Ordering-Flexible Multi-Robot Surface Navigation
Jan 25, 2024



We design a distributed coordinated guiding vector field (CGVF) for a group of robots to achieve ordering-flexible motion coordination while maneuvering on a desired two-dimensional (2D) surface. The CGVF is characterized by three terms, i.e., a convergence term to drive the robots to converge to the desired surface, a propagation term to provide a traversing direction for maneuvering on the desired surface, and a coordinated term to achieve the surface motion coordination with an arbitrary ordering of the robotic group. By setting the surface parameters as additional virtual coordinates, the proposed approach eliminates the potential singularity of the CGVF and enables both the global convergence to the desired surface and the maneuvering on the surface from all possible initial conditions. The ordering-flexible surface motion coordination is realized by each robot to share with its neighbors only two virtual coordinates, i.e. that of a given target and that of its own, which reduces the communication and computation cost in multi-robot surface navigation. Finally, the effectiveness of the CGVF is substantiated by extensive numerical simulations.
Spontaneous-Ordering Platoon Control for Multirobot Path Navigation Using Guiding Vector Fields
Nov 02, 2023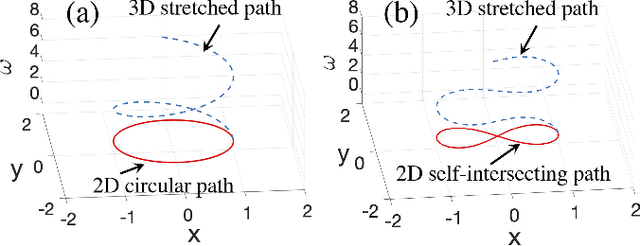
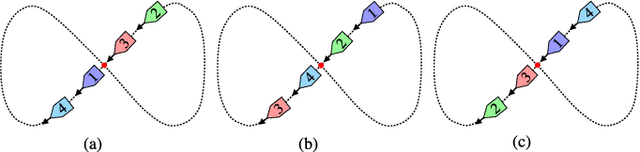
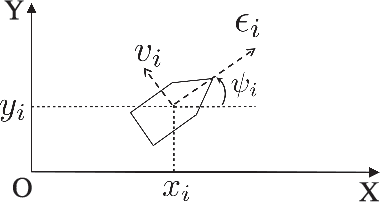
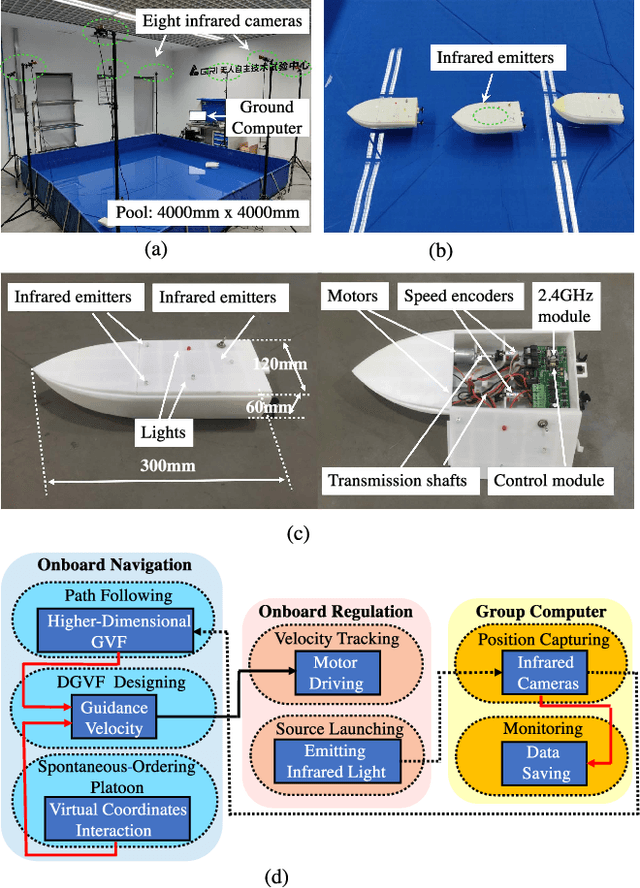
In this paper, we propose a distributed guiding-vector-field (DGVF) algorithm for a team of robots to form a spontaneous-ordering platoon moving along a predefined desired path in the n-dimensional Euclidean space. Particularly, by adding a path parameter as an additional virtual coordinate to each robot, the DGVF algorithm can eliminate the singular points where the vector fields vanish, and govern robots to approach a closed and even self-intersecting desired path. Then, the interactions among neighboring robots and a virtual target robot through their virtual coordinates enable the realization of the desired platoon; in particular, relative parametric displacements can be achieved with arbitrary ordering sequences. Rigorous analysis is provided to guarantee the global convergence to the spontaneous-ordering platoon on the common desired path from any initial positions. 2D experiments using three HUSTER-0.3 unmanned surface vessels (USVs) are conducted to validate the practical effectiveness of the proposed DGVF algorithm, and 3D numerical simulations are presented to demonstrate its effectiveness and robustness when tackling higher-dimensional multi-robot path-navigation missions and some robots breakdown.
Resilient source seeking with robot swarms
Sep 06, 2023



We present a solution for locating the source, or maximum, of an unknown scalar field using a swarm of mobile robots. Unlike relying on the traditional gradient information, the swarm determines an ascending direction to approach the source with arbitrary precision. The ascending direction is calculated from measurements of the field strength at the robot locations and their relative positions concerning the centroid. Rather than focusing on individual robots, we focus the analysis on the density of robots per unit area to guarantee a more resilient swarm, i.e., the functionality remains even if individuals go missing or are misplaced during the mission. We reinforce the robustness of the algorithm by providing sufficient conditions for the swarm shape so that the ascending direction is almost parallel to the gradient. The swarm can respond to an unexpected environment by morphing its shape and exploiting the existence of multiple ascending directions. Finally, we validate our approach numerically with hundreds of robots. The fact that a large number of robots always calculate an ascending direction compensates for the loss of individuals and mitigates issues arising from the actuator and sensor noises.