 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeC2TE: Coordinated Constrained Task Execution Design for Ordering-Flexible Multi-Vehicle Platoon Merging
Jun 16, 2025In this paper, we propose a distributed coordinated constrained task execution (C2TE) algorithm that enables a team of vehicles from different lanes to cooperatively merge into an {\it ordering-flexible platoon} maneuvering on the desired lane. Therein, the platoon is flexible in the sense that no specific spatial ordering sequences of vehicles are predetermined. To attain such a flexible platoon, we first separate the multi-vehicle platoon (MVP) merging mission into two stages, namely, pre-merging regulation and {\it ordering-flexible platoon} merging, and then formulate them into distributed constraint-based optimization problems. Particularly, by encoding longitudinal-distance regulation and same-lane collision avoidance subtasks into the corresponding control barrier function (CBF) constraints, the proposed algorithm in Stage 1 can safely enlarge sufficient longitudinal distances among adjacent vehicles. Then, by encoding lateral convergence, longitudinal-target attraction, and neighboring collision avoidance subtasks into CBF constraints, the proposed algorithm in Stage~2 can efficiently achieve the {\it ordering-flexible platoon}. Note that the {\it ordering-flexible platoon} is realized through the interaction of the longitudinal-target attraction and time-varying neighboring collision avoidance constraints simultaneously. Feasibility guarantee and rigorous convergence analysis are both provided under strong nonlinear couplings induced by flexible orderings. Finally, experiments using three autonomous mobile vehicles (AMVs) are conducted to verify the effectiveness and flexibility of the proposed algorithm, and extensive simulations are performed to demonstrate its robustness, adaptability, and scalability when tackling vehicles' sudden breakdown, new appearing, different number of lanes, mixed autonomy, and large-scale scenarios, respectively.
Equilibrium-Driven Smooth Separation and Navigation of Marsupial Robotic Systems
Jun 16, 2025In this paper, we propose an equilibrium-driven controller that enables a marsupial carrier-passenger robotic system to achieve smooth carrier-passenger separation and then to navigate the passenger robot toward a predetermined target point. Particularly, we design a potential gradient in the form of a cubic polynomial for the passenger's controller as a function of the carrier-passenger and carrier-target distances in the moving carrier's frame. This introduces multiple equilibrium points corresponding to the zero state of the error dynamic system during carrier-passenger separation. The change of equilibrium points is associated with the change in their attraction regions, enabling smooth carrier-passenger separation and afterwards seamless navigation toward the target. Finally, simulations demonstrate the effectiveness and adaptability of the proposed controller in environments containing obstacles.
Concurrent-Allocation Task Execution for Multi-Robot Path-Crossing-Minimal Navigation in Obstacle Environments
Apr 12, 2025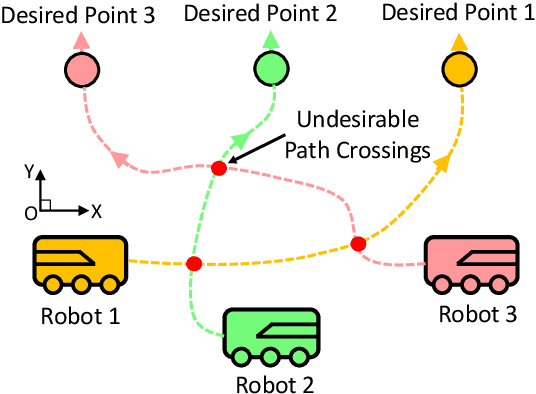
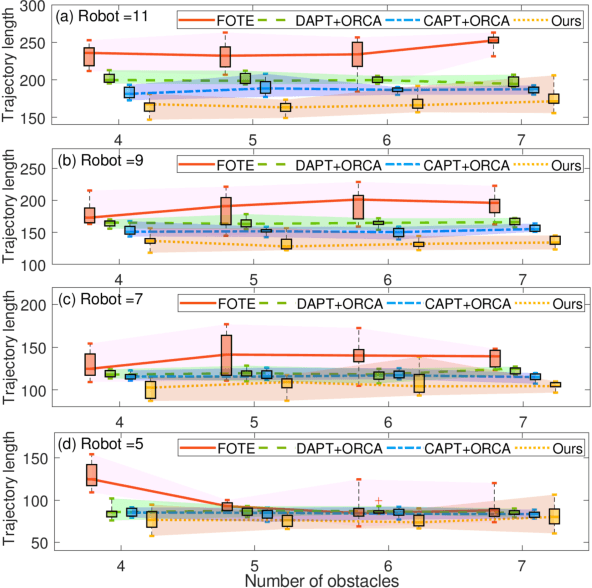
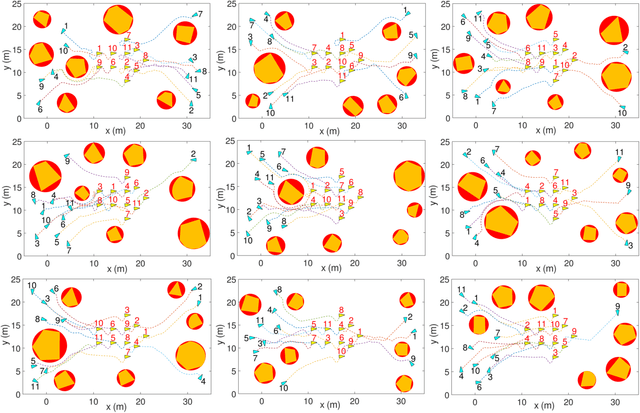
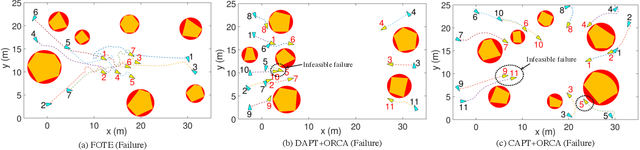
Reducing undesirable path crossings among trajectories of different robots is vital in multi-robot navigation missions, which not only reduces detours and conflict scenarios, but also enhances navigation efficiency and boosts productivity. Despite recent progress in multi-robot path-crossing-minimal (MPCM) navigation, the majority of approaches depend on the minimal squared-distance reassignment of suitable desired points to robots directly. However, if obstacles occupy the passing space, calculating the actual robot-point distances becomes complex or intractable, which may render the MPCM navigation in obstacle environments inefficient or even infeasible. In this paper, the concurrent-allocation task execution (CATE) algorithm is presented to address this problem (i.e., MPCM navigation in obstacle environments). First, the path-crossing-related elements in terms of (i) robot allocation, (ii) desired-point convergence, and (iii) collision and obstacle avoidance are encoded into integer and control barrier function (CBF) constraints. Then, the proposed constraints are used in an online constrained optimization framework, which implicitly yet effectively minimizes the possible path crossings and trajectory length in obstacle environments by minimizing the desired point allocation cost and slack variables in CBF constraints simultaneously. In this way, the MPCM navigation in obstacle environments can be achieved with flexible spatial orderings. Note that the feasibility of solutions and the asymptotic convergence property of the proposed CATE algorithm in obstacle environments are both guaranteed, and the calculation burden is also reduced by concurrently calculating the optimal allocation and the control input directly without the path planning process.
Coordinated Guiding Vector Field Design for Ordering-Flexible Multi-Robot Surface Navigation
Jan 25, 2024



We design a distributed coordinated guiding vector field (CGVF) for a group of robots to achieve ordering-flexible motion coordination while maneuvering on a desired two-dimensional (2D) surface. The CGVF is characterized by three terms, i.e., a convergence term to drive the robots to converge to the desired surface, a propagation term to provide a traversing direction for maneuvering on the desired surface, and a coordinated term to achieve the surface motion coordination with an arbitrary ordering of the robotic group. By setting the surface parameters as additional virtual coordinates, the proposed approach eliminates the potential singularity of the CGVF and enables both the global convergence to the desired surface and the maneuvering on the surface from all possible initial conditions. The ordering-flexible surface motion coordination is realized by each robot to share with its neighbors only two virtual coordinates, i.e. that of a given target and that of its own, which reduces the communication and computation cost in multi-robot surface navigation. Finally, the effectiveness of the CGVF is substantiated by extensive numerical simulations.
Ordering-Flexible Multi-Robot Coordination for MovingTarget Convoying Using Long-TermTask Execution
Jan 12, 2024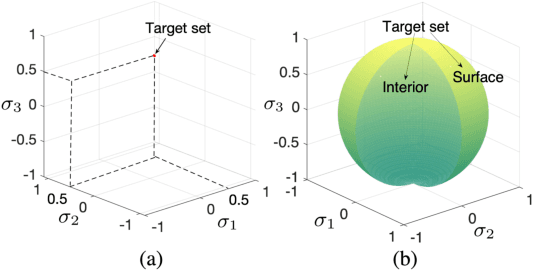
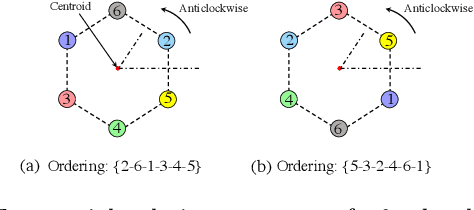
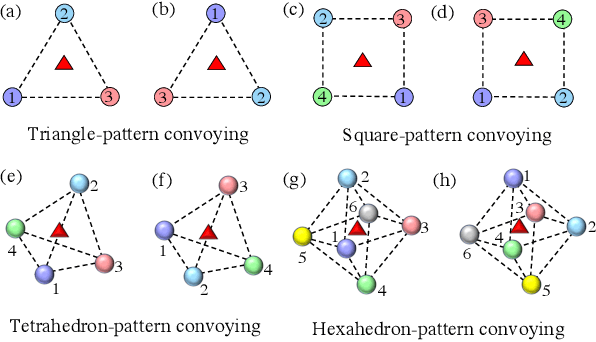
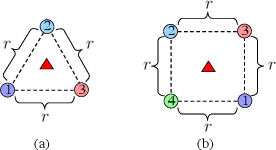
In this paper, we propose a cooperative long-term task execution (LTTE) algorithm for protecting a moving target into the interior of an ordering-flexible convex hull by a team of robots resiliently in the changing environments. Particularly, by designing target-approaching and sensing-neighbor collision-free subtasks, and incorporating these subtasks into the constraints rather than the traditional cost function in an online constraint-based optimization framework, the proposed LTTE can systematically guarantee long-term target convoying under changing environments in the n-dimensional Euclidean space. Then, the introduction of slack variables allow for the constraint violation of different subtasks; i.e., the attraction from target-approaching constraints and the repulsion from time-varying collision-avoidance constraints, which results in the desired formation with arbitrary spatial ordering sequences. Rigorous analysis is provided to guarantee asymptotical convergence with challenging nonlinear couplings induced by time-varying collision-free constraints. Finally, 2D experiments using three autonomous mobile robots (AMRs) are conducted to validate the effectiveness of the proposed algorithm, and 3D simulations tackling changing environmental elements, such as different initial positions, some robots suddenly breakdown and static obstacles are presented to demonstrate the multi-dimensional adaptability, robustness and the ability of obstacle avoidance of the proposed method.
Coordinated Navigation Control of Cross-Domain Unmanned Systems via Guiding Vector Fields
Dec 18, 2023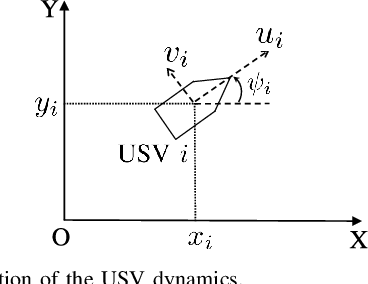
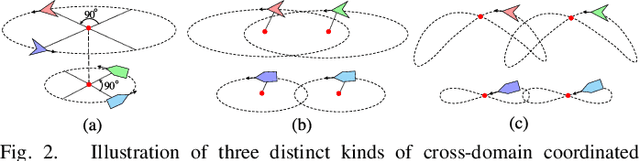
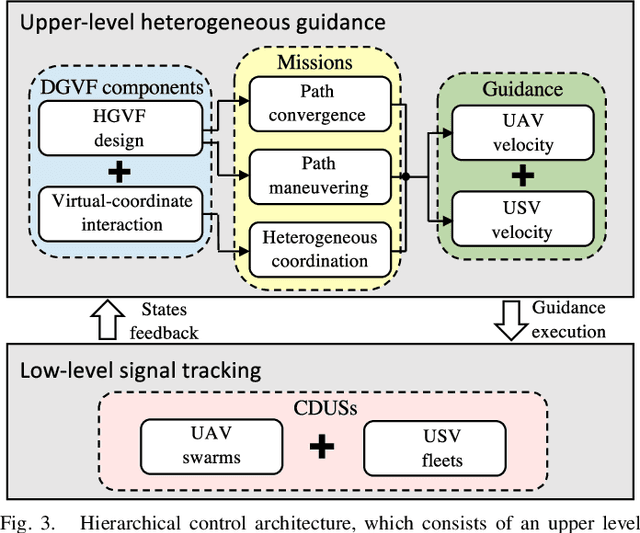
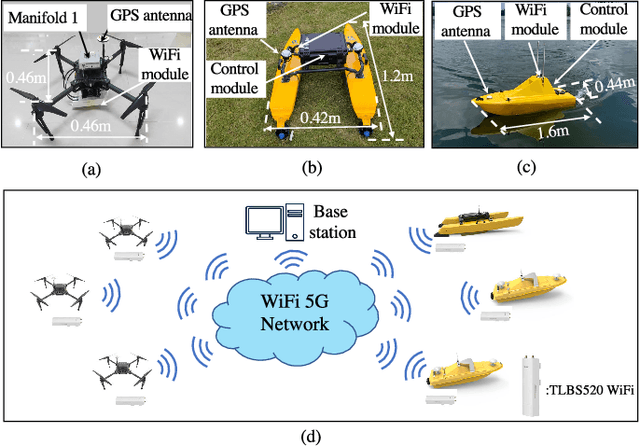
This paper proposes a distributed guiding-vector-field (DGVF) controller for cross-domain unmanned systems (CDUSs) consisting of heterogeneous unmanned aerial vehicles (UAVs) and unmanned surface vehicles (USVs), to achieve coordinated navigation whereas maneuvering along their prescribed paths. In particular, the DGVF controller provides a hierarchical architecture of an upper-level heterogeneous guidance velocity controller and a lower-level signal tracking regulator. Therein, the upper-level controller is to govern multiple heterogeneous USVs and UAVs to approach and maneuver along the prescribed paths and coordinate the formation simultaneously, whereas the low-level regulator is to track the corresponding desired guidance signals provided by the upper-level module. Significantly, the heterogeneous coordination among neighboring UAVs and USVs is achieved merely by the lightweight communication of a scalar (i.e., the additional virtual coordinate), which substantially decreases the communication and computational costs. Sufficient conditions assuring asymptotical convergence of the closed-loop system are derived in presence of the exponentially vanishing tracking errors. Finally, real-lake experiments are conducted on a self-established cross-domain heterogeneous platform consisting of three M-100 UAVs, two HUSTER-16 USVs, a HUSTER-12C USV, and a WiFi 5G wireless communication station to verify the effectiveness of the present DGVF controller.
* 14 pages
Spontaneous-Ordering Platoon Control for Multirobot Path Navigation Using Guiding Vector Fields
Nov 02, 2023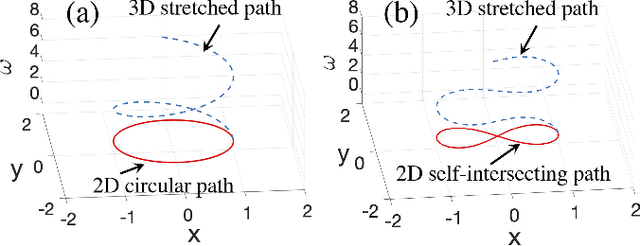
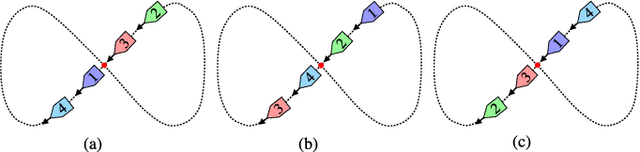
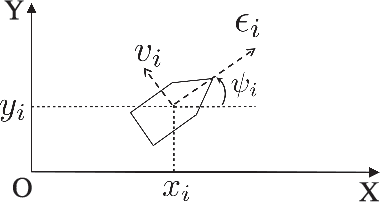
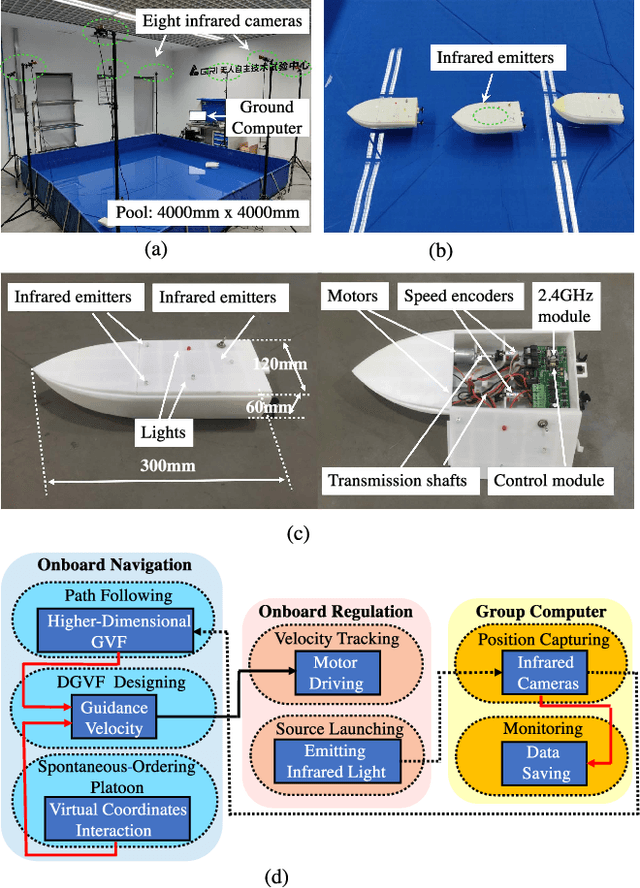
In this paper, we propose a distributed guiding-vector-field (DGVF) algorithm for a team of robots to form a spontaneous-ordering platoon moving along a predefined desired path in the n-dimensional Euclidean space. Particularly, by adding a path parameter as an additional virtual coordinate to each robot, the DGVF algorithm can eliminate the singular points where the vector fields vanish, and govern robots to approach a closed and even self-intersecting desired path. Then, the interactions among neighboring robots and a virtual target robot through their virtual coordinates enable the realization of the desired platoon; in particular, relative parametric displacements can be achieved with arbitrary ordering sequences. Rigorous analysis is provided to guarantee the global convergence to the spontaneous-ordering platoon on the common desired path from any initial positions. 2D experiments using three HUSTER-0.3 unmanned surface vessels (USVs) are conducted to validate the practical effectiveness of the proposed DGVF algorithm, and 3D numerical simulations are presented to demonstrate its effectiveness and robustness when tackling higher-dimensional multi-robot path-navigation missions and some robots breakdown.