 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEquilibrium-Driven Smooth Separation and Navigation of Marsupial Robotic Systems
Jun 16, 2025In this paper, we propose an equilibrium-driven controller that enables a marsupial carrier-passenger robotic system to achieve smooth carrier-passenger separation and then to navigate the passenger robot toward a predetermined target point. Particularly, we design a potential gradient in the form of a cubic polynomial for the passenger's controller as a function of the carrier-passenger and carrier-target distances in the moving carrier's frame. This introduces multiple equilibrium points corresponding to the zero state of the error dynamic system during carrier-passenger separation. The change of equilibrium points is associated with the change in their attraction regions, enabling smooth carrier-passenger separation and afterwards seamless navigation toward the target. Finally, simulations demonstrate the effectiveness and adaptability of the proposed controller in environments containing obstacles.
Velocity-free task-space regulator for robot manipulators with external disturbances
Mar 04, 2025This paper addresses the problem of task-space robust regulation of robot manipulators subject to external disturbances. A velocity-free control law is proposed by combining the internal model principle and the passivity-based output-feedback control approach. The developed output-feedback controller ensures not only asymptotic convergence of the regulation error but also suppression of unwanted external step/sinusoidal disturbances. The potential of the proposed method lies in its simplicity, intuitively appealing, and simple gain selection criteria for synthesis of multi-joint robot manipulator control systems.
Developing Simulation Models for Soft Robotic Grippers in Webots
Nov 05, 2024



Robotic simulators provide cost-effective and risk-free virtual environments for studying robotic designs, control algorithms, and sensor integrations. They typically host extensive libraries of sensors and actuators that facilitate rapid prototyping and design evaluations in simulation. The use of the most prominent existing robotic simulators is however limited to simulation of rigid-link robots. On the other hand, there exist dedicated specialized environments for simulating soft robots. This separation limits the study of soft robotic systems, particularly in hybrid scenarios where soft and rigid sub-systems co-exist. In this work, we develop a lightweight open-source digital twin of a commercially available soft gripper, directly integrated within the robotic simulator Webots. We use a Rigid-Link-Discretization (RLD) model to simulate the soft gripper. Using a Particle Swarm Optimization (PSO) approach, we identify the parameters of the RLD model based on the kinematics and dynamics of the physical system and show the efficacy of our modeling approach in validation experiments. All software and experimental details are available on github: https://github.com/anonymousgituser1/Robosoft2025
WiFi-CSI Sensing and Bearing Estimation in Multi-Robot Systems: An Open-Source Simulation Framework
Oct 02, 2024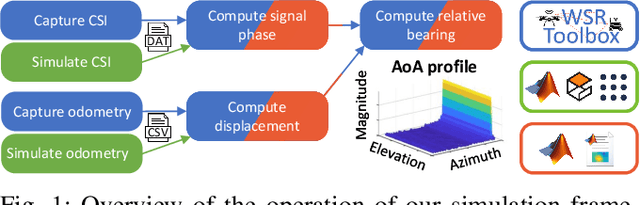
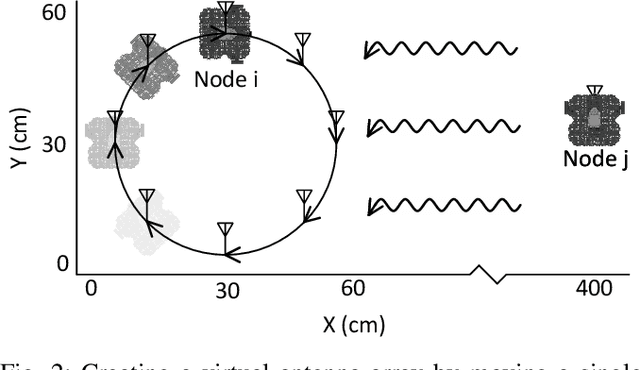
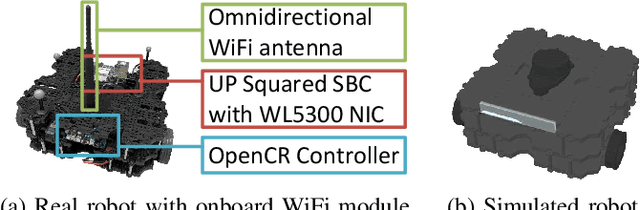
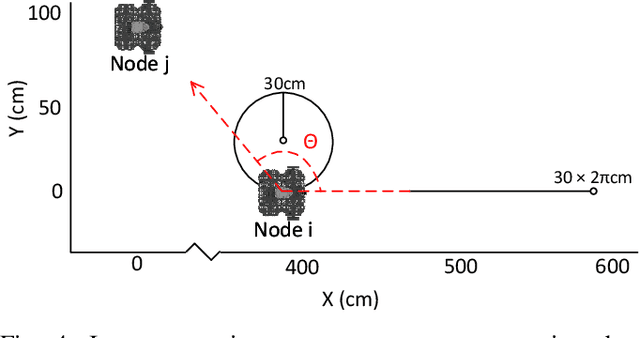
Development and testing of multi-robot systems employing wireless signal-based sensing requires access to suitable hardware, such as channel monitoring WiFi transceivers, which can pose significant limitations. The WiFi Sensor for Robotics (WSR) toolbox, introduced by Jadhav et al. in 2022, provides a novel solution by using WiFi Channel State Information (CSI) to compute relative bearing between robots. The toolbox leverages the amplitude and phase of WiFi signals and creates virtual antenna arrays by exploiting the motion of mobile robots, eliminating the need for physical antenna arrays. However, the WSR toolbox's reliance on an obsoleting WiFi transceiver hardware has limited its operability and accessibility, hindering broader application and development of relevant tools. We present an open-source simulation framework that replicates the WSR toolbox's capabilities using Gazebo and Matlab. By simulating WiFi-CSI data collection, our framework emulates the behavior of mobile robots equipped with the WSR toolbox, enabling precise bearing estimation without physical hardware. We validate the framework through experiments with both simulated and real Turtlebot3 robots, showing a close match between the obtained CSI data and the resulting bearing estimates. This work provides a virtual environment for developing and testing WiFi-CSI-based multi-robot localization without relying on physical hardware. All code and experimental setup information are publicly available at https://github.com/BrendanxP/CSI-Simulation-Framework
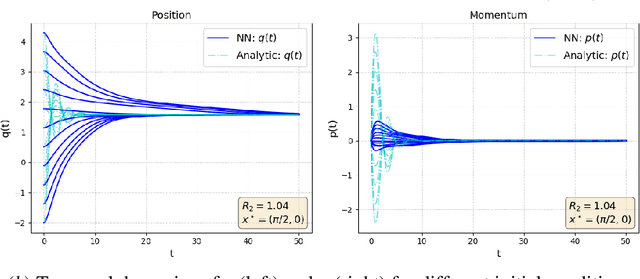
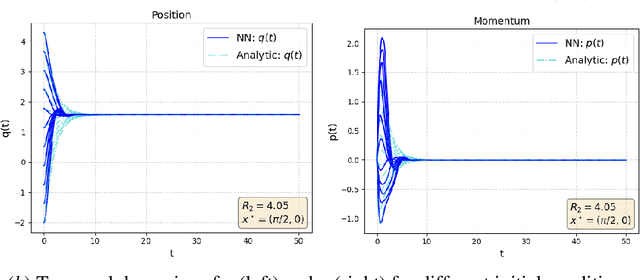
Robust Neural IDA-PBC: passivity-based stabilization under approximations
Sep 24, 2024In this paper, we restructure the Neural Interconnection and Damping Assignment - Passivity Based Control (Neural IDA-PBC) design methodology, and we formally analyze its closed-loop properties. Neural IDA-PBC redefines the IDA-PBC design approach as an optimization problem by building on the framework of Physics Informed Neural Networks (PINNs). However, the closed-loop stability and robustness properties under Neural IDA-PBC remain unexplored. To address the issue, we study the behavior of classical IDA-PBC under approximations. Our theoretical analysis allows deriving conditions for practical and asymptotic stability of the desired equilibrium point. Moreover, it extends the Neural IDA-PBC applicability to port-Hamiltonian systems where the matching conditions cannot be solved exactly. Our renewed optimization-based design introduces three significant aspects: i) it involves a novel optimization objective including stability and robustness constraints issued from our theoretical analysis; ii) it employs separate Neural Networks (NNs), which can be structured to reduce the search space to relevant functions; iii) it does not require knowledge about the port-Hamiltonian formulation of the system's model. Our methodology is validated with simulations on three standard benchmarks: a double pendulum, a nonlinear mass-spring-damper and a cartpole. Notably, classical IDA-PBC designs cannot be analytically derived for the latter.
Distributed end-effector formation control for mixed fully- and under-actuated manipulators with flexible joints
Oct 02, 2023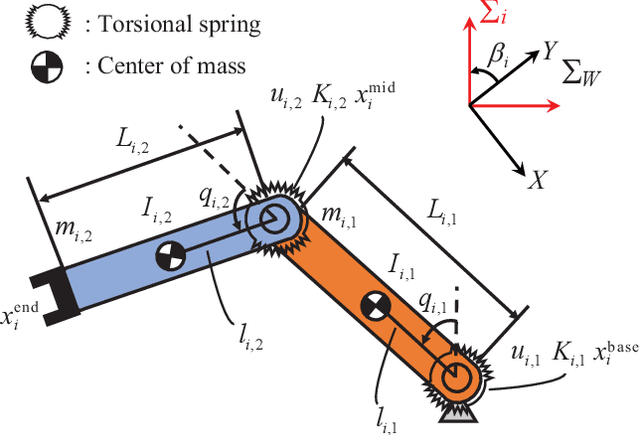
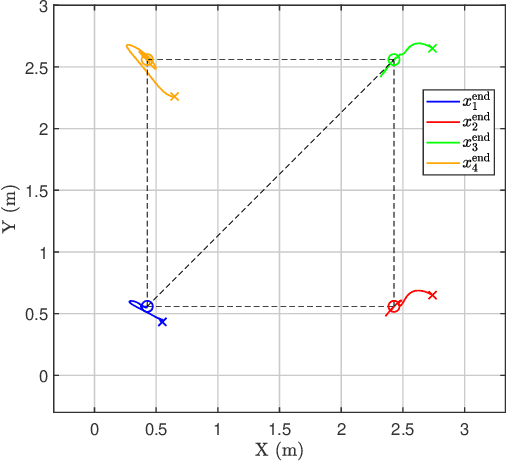
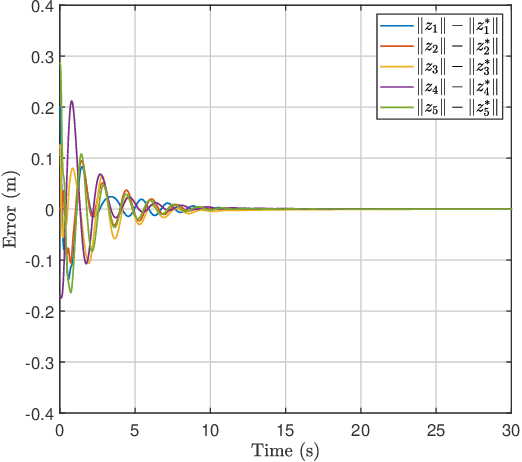
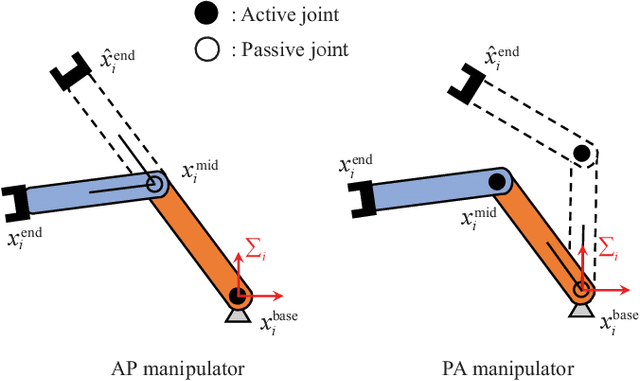
The presence of faulty or underactuated manipulators can disrupt the end-effector formation keeping of a team of manipulators. Based on two-link planar manipulators, we investigate this end-effector formation keeping problem for mixed fully- and under-actuated manipulators with flexible joints. In this case, the underactuated manipulators can comprise of active-passive (AP) manipulators, passive-active (PA) manipulators, or a combination thereof. We propose distributed control laws for the different types of manipulators to achieve and maintain the desired formation shape of the end-effectors. It is achieved by assigning virtual springs to the end-effectors for the fully-actuated ones and to the virtual end-effectors for the under-actuated ones. We study further the set of all desired and reachable shapes for the networked manipulators' end-effectors. Finally, we validate our analysis via numerical simulations.
Distributed formation control of end-effector of mixed planar fully- and under-actuated manipulators
Sep 14, 2023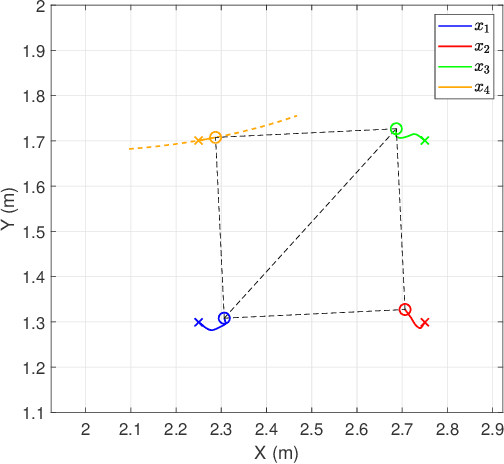
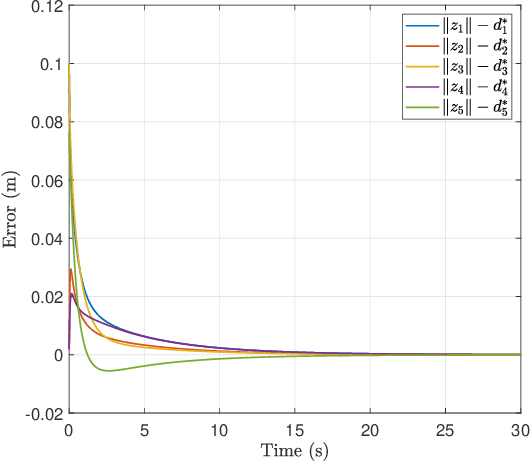
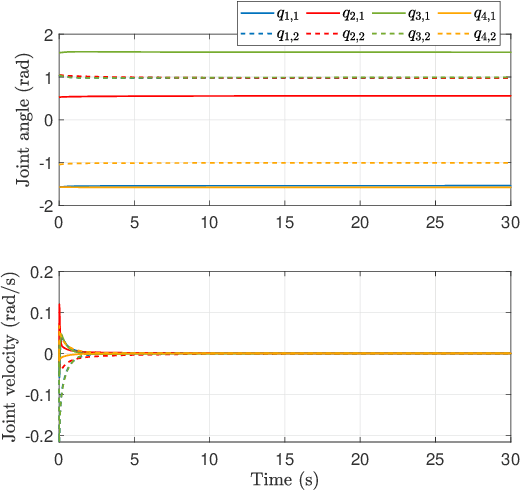
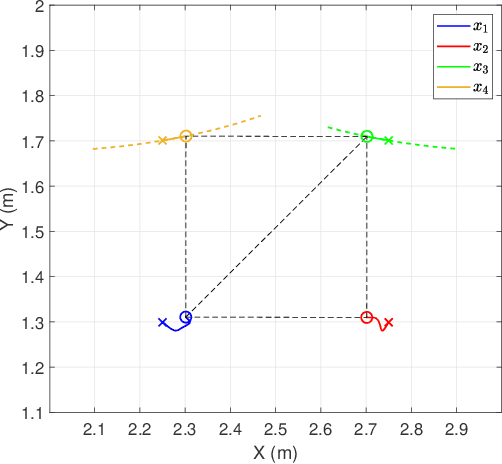
This paper addresses the problem of end-effector formation control for a mixed group of two-link manipulators moving in a horizontal plane that comprises of fully-actuated manipulators and underactuated manipulators with only the second joint being actuated (referred to as the passive-active (PA) manipulators). The problem is solved by extending the distributed end-effector formation controller for the fully-actuated manipulator to the PA manipulator moving in a horizontal plane by using its integrability. This paper presents stability analysis of the closed-loop systems under a given necessary condition, and we prove that the manipulators' end-effector converge to the desired formation shape. The proposed method is validated by simulations.
Collision-free Source Seeking and Flocking Control of Multi-agents with Connectivity Preservation
Jan 11, 2023We present a distributed source seeking and flocking control method for networked multi-agent systems with non-holonomic constraint in an unknown cluttered environment. Based solely on identical on-board sensor systems, which measure the source local field, the group objective is attained by appointing a leader agent, which has the largest signal strength to the source (as a proxy to the distance to the source), to seek the source while the remaining follower agents form a cohesive flocking with the leader using a distributed flocking control law in a connectivity-preserved undirected network of multi-agent systems. To guarantee the safe separation and group motion for all agents and to solve the conflicts with the "cohesion" flocking rule of Reynolds, the distributed control algorithm is solved individually through quadratic-programming optimization problem with safety constraints, {which guarantee the collision avoidance for inter-agents and obstacles in the cluttered environment}. Stability analysis of the closed-loop system is presented and the efficacy of the methods is shown in simulation results.
Collision-free Source Seeking Control Methods for Unicycle Robots
Dec 14, 2022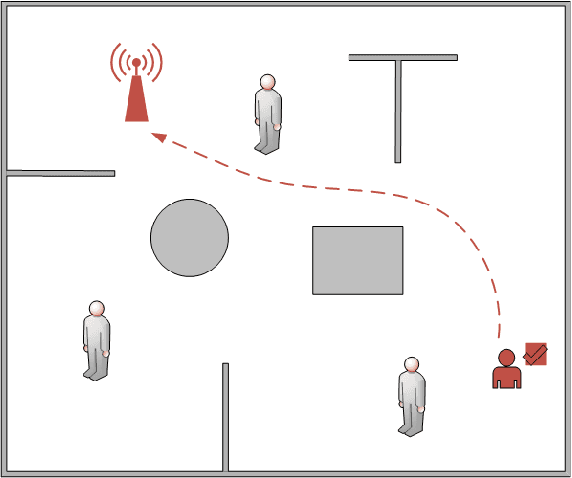
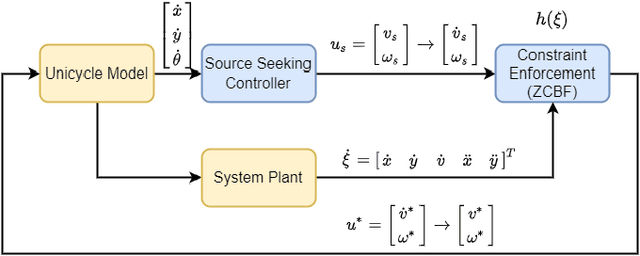
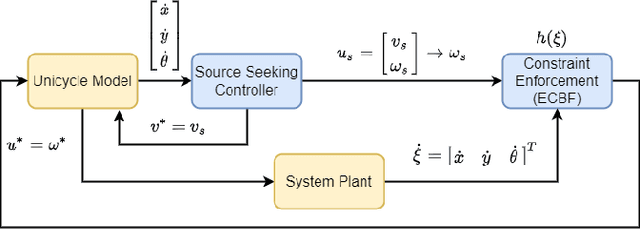
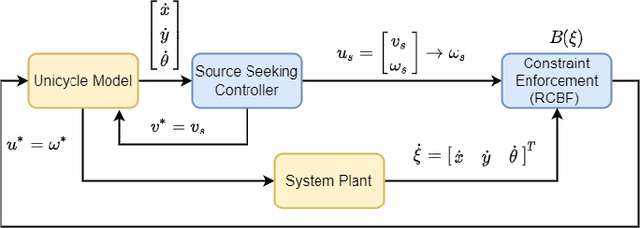
In this work, we propose a collision-free source seeking control framework for unicycle robots traversing an unknown cluttered environment. In this framework, the obstacle avoidance is guided by the control barrier functions (CBF) embedded in quadratic programming and the source seeking control relies solely on the use of on-board sensors that measure signal strength of the source. To tackle the mixed relative degree of the CBF, we proposed three different CBF, namely the zeroing control barrier functions (ZCBF), exponential control barrier functions (ECBF), and reciprocal control barrier functions (RCBF) that can directly be integrated with our recent gradient-ascent source-seeking control law. We provide rigorous analysis of the three different methods and show the efficacy of the approaches in simulations using Matlab, as well as, using a realistic dynamic environment with moving obstacles in Gazebo/ROS.
Total Energy Shaping with Neural Interconnection and Damping Assignment -- Passivity Based Control
Dec 24, 2021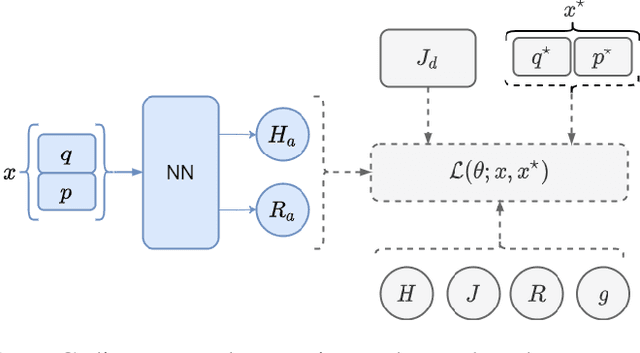

In this work we exploit the universal approximation property of Neural Networks (NNs) to design interconnection and damping assignment (IDA) passivity-based control (PBC) schemes for fully-actuated mechanical systems in the port-Hamiltonian (pH) framework. To that end, we transform the IDA-PBC method into a supervised learning problem that solves the partial differential matching equations, and fulfills equilibrium assignment and Lyapunov stability conditions. A main consequence of this, is that the output of the learning algorithm has a clear control-theoretic interpretation in terms of passivity and Lyapunov stability. The proposed control design methodology is validated for mechanical systems of one and two degrees-of-freedom via numerical simulations.