 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision-free Source Seeking and Flocking Control of Multi-agents with Connectivity Preservation
Jan 11, 2023We present a distributed source seeking and flocking control method for networked multi-agent systems with non-holonomic constraint in an unknown cluttered environment. Based solely on identical on-board sensor systems, which measure the source local field, the group objective is attained by appointing a leader agent, which has the largest signal strength to the source (as a proxy to the distance to the source), to seek the source while the remaining follower agents form a cohesive flocking with the leader using a distributed flocking control law in a connectivity-preserved undirected network of multi-agent systems. To guarantee the safe separation and group motion for all agents and to solve the conflicts with the "cohesion" flocking rule of Reynolds, the distributed control algorithm is solved individually through quadratic-programming optimization problem with safety constraints, {which guarantee the collision avoidance for inter-agents and obstacles in the cluttered environment}. Stability analysis of the closed-loop system is presented and the efficacy of the methods is shown in simulation results.
Collision-free Source Seeking Control Methods for Unicycle Robots
Dec 14, 2022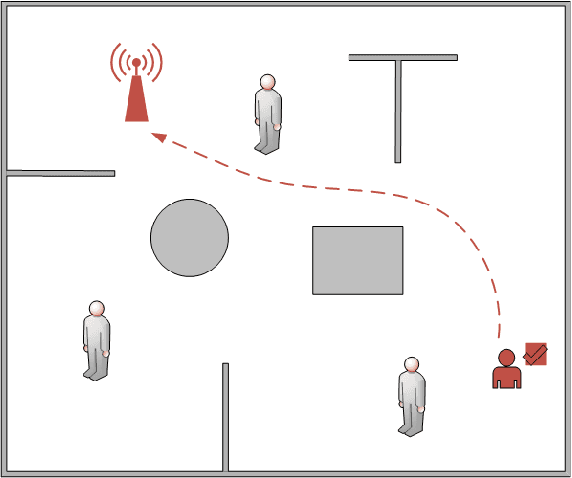
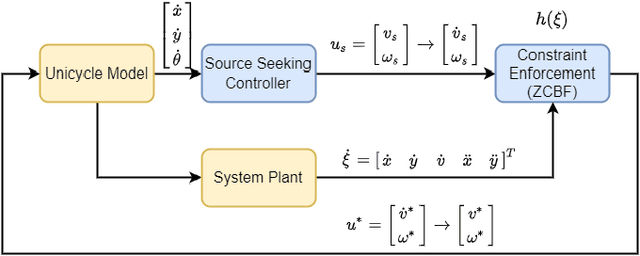
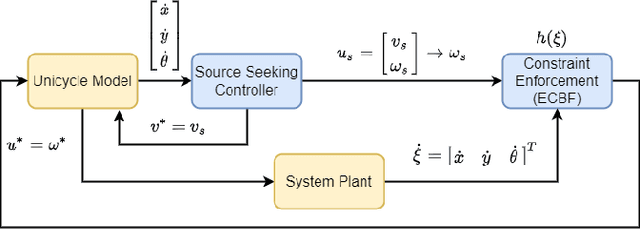
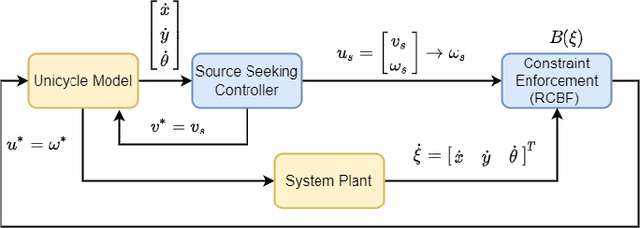
In this work, we propose a collision-free source seeking control framework for unicycle robots traversing an unknown cluttered environment. In this framework, the obstacle avoidance is guided by the control barrier functions (CBF) embedded in quadratic programming and the source seeking control relies solely on the use of on-board sensors that measure signal strength of the source. To tackle the mixed relative degree of the CBF, we proposed three different CBF, namely the zeroing control barrier functions (ZCBF), exponential control barrier functions (ECBF), and reciprocal control barrier functions (RCBF) that can directly be integrated with our recent gradient-ascent source-seeking control law. We provide rigorous analysis of the three different methods and show the efficacy of the approaches in simulations using Matlab, as well as, using a realistic dynamic environment with moving obstacles in Gazebo/ROS.
Source Seeking Control of Unicycle Robots with 3D-printed Flexible Piezoresistive Sensors
Apr 29, 2021

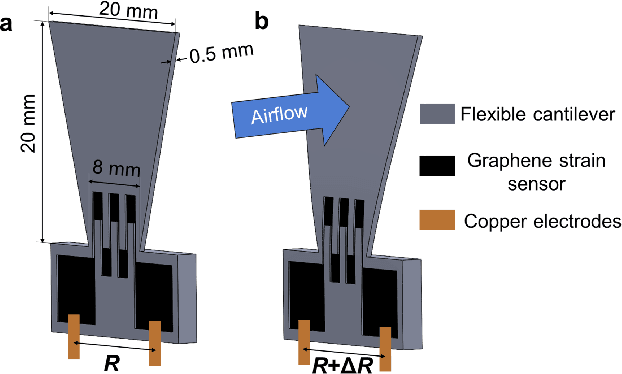
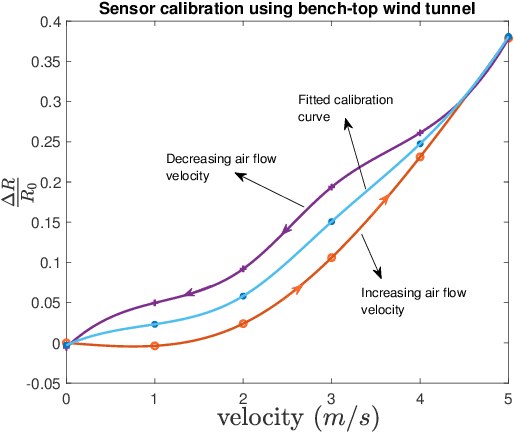
We present the design and experimental validation of source seeking control algorithms for a unicycle mobile robot that is equipped with novel 3D-printed flexible graphene-based piezoresistive airflow sensors. Based solely on a local gradient measurement from the airflow sensors, we propose and analyze a projected gradient ascent algorithm to solve the source seeking problem. In the case of partial sensor failure, we propose a combination of Extremum-Seeking Control with our projected gradient ascent algorithm. For both control laws, we prove the asymptotic convergence of the robot to the source. Numerical simulations were performed to validate the algorithms and experimental validations are presented to demonstrate the efficacy of the proposed methods.