 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWiFi-CSI Sensing and Bearing Estimation in Multi-Robot Systems: An Open-Source Simulation Framework
Oct 02, 2024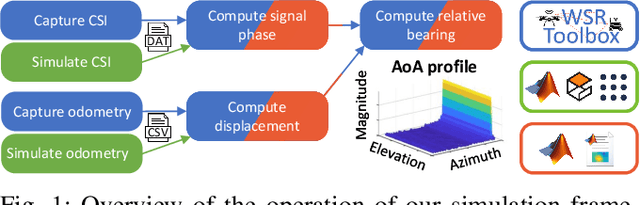
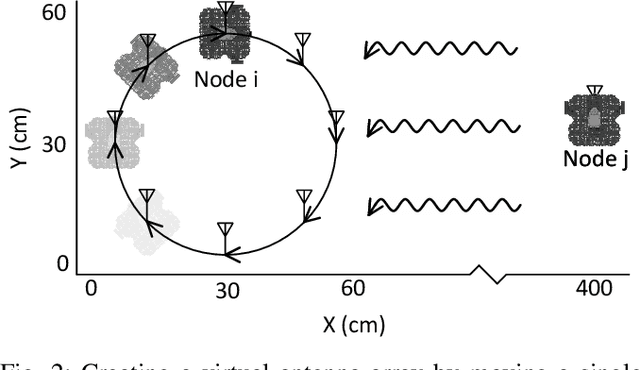
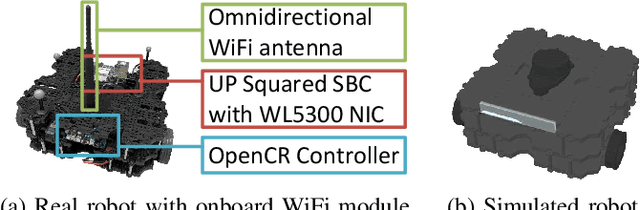
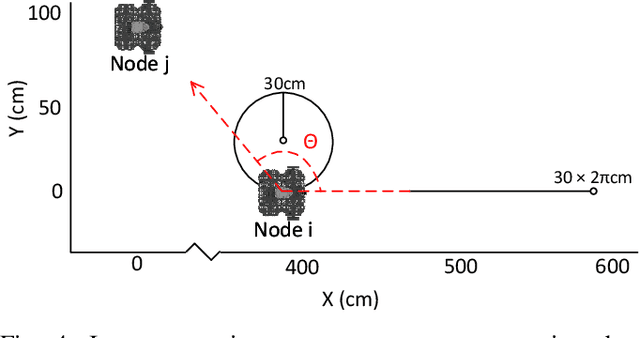
Development and testing of multi-robot systems employing wireless signal-based sensing requires access to suitable hardware, such as channel monitoring WiFi transceivers, which can pose significant limitations. The WiFi Sensor for Robotics (WSR) toolbox, introduced by Jadhav et al. in 2022, provides a novel solution by using WiFi Channel State Information (CSI) to compute relative bearing between robots. The toolbox leverages the amplitude and phase of WiFi signals and creates virtual antenna arrays by exploiting the motion of mobile robots, eliminating the need for physical antenna arrays. However, the WSR toolbox's reliance on an obsoleting WiFi transceiver hardware has limited its operability and accessibility, hindering broader application and development of relevant tools. We present an open-source simulation framework that replicates the WSR toolbox's capabilities using Gazebo and Matlab. By simulating WiFi-CSI data collection, our framework emulates the behavior of mobile robots equipped with the WSR toolbox, enabling precise bearing estimation without physical hardware. We validate the framework through experiments with both simulated and real Turtlebot3 robots, showing a close match between the obtained CSI data and the resulting bearing estimates. This work provides a virtual environment for developing and testing WiFi-CSI-based multi-robot localization without relying on physical hardware. All code and experimental setup information are publicly available at https://github.com/BrendanxP/CSI-Simulation-Framework