 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Surface Inspection via Operational Modal Analysis by a Swarm of Miniaturized Vibration-Sensing Robots
Jul 10, 2025Robot swarms offer the potential to serve a variety of distributed sensing applications. An interesting real-world application that stands to benefit significantly from deployment of swarms is structural monitoring, where traditional sensor networks face challenges in structural coverage due to their static nature. This paper investigates the deployment of a swarm of miniaturized vibration sensing robots to inspect and localize structural damages on a surface section within a high-fidelity simulation environment. In particular, we consider a 1 m x 1 m x 3 mm steel surface section and utilize finite element analysis using Abaqus to obtain realistic structural vibration data. The resulting vibration data is imported into the physics-based robotic simulator Webots, where we simulate the dynamics of our surface inspecting robot swarm. We employ (i) Gaussian process estimators to guide the robots' exploration as they collect vibration samples across the surface and (ii) operational modal analysis to detect structural damages by estimating and comparing existing and intact structural vibration patterns. We analyze the influence of exploration radii on estimation uncertainty and assess the effectiveness of our method across 10 randomized scenarios, where the number, locations, surface area, and depth of structural damages vary. Our simulation studies validate the efficacy of our miniaturized robot swarm for vibration-based structural inspection.
Optimization of Collective Bayesian Decision-Making in a Swarm of Miniaturized Vibration-Sensing Robots
Dec 19, 2024



Inspection of infrastructure using static sensor nodes has become a well established approach in recent decades. In this work, we present an experimental setup to address a binary inspection task using mobile sensor nodes. The objective is to identify the predominant tile type in a 1mx1m tiled surface composed of vibrating and non-vibrating tiles. A swarm of miniaturized robots, equipped with onboard IMUs for sensing and IR sensors for collision avoidance, performs the inspection. The decision-making approach leverages a Bayesian algorithm, updating robots' belief using inference. The original algorithm uses one of two information sharing strategies. We introduce a novel information sharing strategy, aiming to accelerate the decision-making. To optimize the algorithm parameters, we develop a simulation framework calibrated to our real-world setup in the high-fidelity Webots robotic simulator. We evaluate the three information sharing strategies through simulations and real-world experiments. Moreover, we test the effectiveness of our optimization by placing swarms with optimized and non-optimized parameters in increasingly complex environments with varied spatial correlation and fill ratios. Results show that our proposed information sharing strategy consistently outperforms previously established information-sharing strategies in decision time. Additionally, optimized parameters yield robust performance across different environments. Conversely, non-optimized parameters perform well in simpler scenarios but show reduced accuracy in complex settings.
Developing Simulation Models for Soft Robotic Grippers in Webots
Nov 05, 2024



Robotic simulators provide cost-effective and risk-free virtual environments for studying robotic designs, control algorithms, and sensor integrations. They typically host extensive libraries of sensors and actuators that facilitate rapid prototyping and design evaluations in simulation. The use of the most prominent existing robotic simulators is however limited to simulation of rigid-link robots. On the other hand, there exist dedicated specialized environments for simulating soft robots. This separation limits the study of soft robotic systems, particularly in hybrid scenarios where soft and rigid sub-systems co-exist. In this work, we develop a lightweight open-source digital twin of a commercially available soft gripper, directly integrated within the robotic simulator Webots. We use a Rigid-Link-Discretization (RLD) model to simulate the soft gripper. Using a Particle Swarm Optimization (PSO) approach, we identify the parameters of the RLD model based on the kinematics and dynamics of the physical system and show the efficacy of our modeling approach in validation experiments. All software and experimental details are available on github: https://github.com/anonymousgituser1/Robosoft2025
WiFi-CSI Sensing and Bearing Estimation in Multi-Robot Systems: An Open-Source Simulation Framework
Oct 02, 2024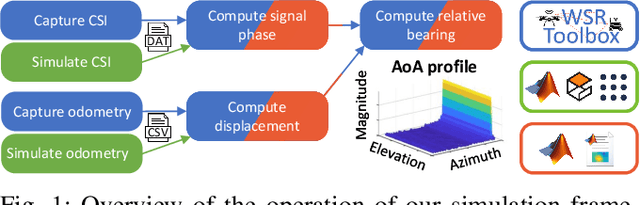
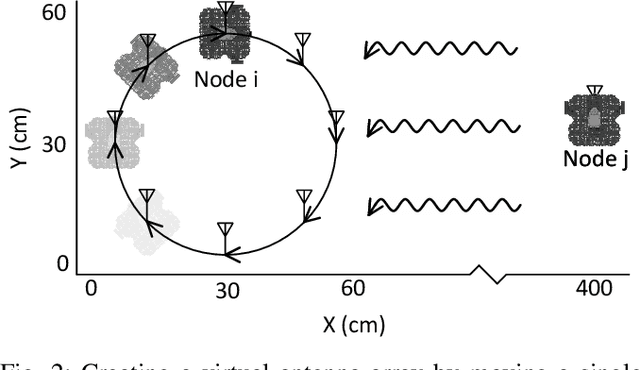
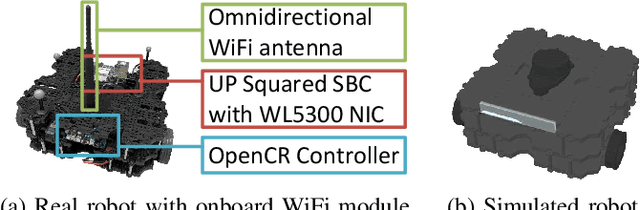
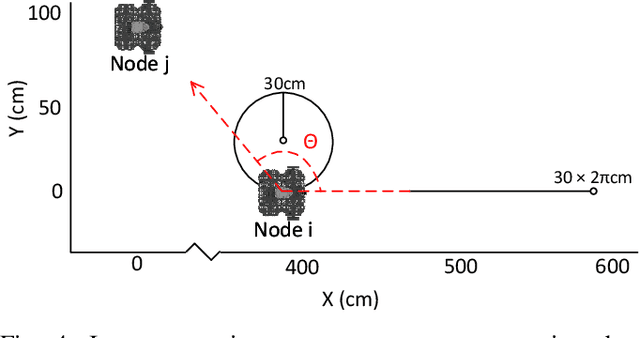
Development and testing of multi-robot systems employing wireless signal-based sensing requires access to suitable hardware, such as channel monitoring WiFi transceivers, which can pose significant limitations. The WiFi Sensor for Robotics (WSR) toolbox, introduced by Jadhav et al. in 2022, provides a novel solution by using WiFi Channel State Information (CSI) to compute relative bearing between robots. The toolbox leverages the amplitude and phase of WiFi signals and creates virtual antenna arrays by exploiting the motion of mobile robots, eliminating the need for physical antenna arrays. However, the WSR toolbox's reliance on an obsoleting WiFi transceiver hardware has limited its operability and accessibility, hindering broader application and development of relevant tools. We present an open-source simulation framework that replicates the WSR toolbox's capabilities using Gazebo and Matlab. By simulating WiFi-CSI data collection, our framework emulates the behavior of mobile robots equipped with the WSR toolbox, enabling precise bearing estimation without physical hardware. We validate the framework through experiments with both simulated and real Turtlebot3 robots, showing a close match between the obtained CSI data and the resulting bearing estimates. This work provides a virtual environment for developing and testing WiFi-CSI-based multi-robot localization without relying on physical hardware. All code and experimental setup information are publicly available at https://github.com/BrendanxP/CSI-Simulation-Framework
Collective Bayesian Decision-Making in a Swarm of Miniaturized Robots for Surface Inspection
Apr 12, 2024



Robot swarms can effectively serve a variety of sensing and inspection applications. Certain inspection tasks require a binary classification decision. This work presents an experimental setup for a surface inspection task based on vibration sensing and studies a Bayesian two-outcome decision-making algorithm in a swarm of miniaturized wheeled robots. The robots are tasked with individually inspecting and collectively classifying a 1mx1m tiled surface consisting of vibrating and non-vibrating tiles based on the majority type of tiles. The robots sense vibrations using onboard IMUs and perform collision avoidance using a set of IR sensors. We develop a simulation and optimization framework leveraging the Webots robotic simulator and a Particle Swarm Optimization (PSO) method. We consider two existing information sharing strategies and propose a new one that allows the swarm to rapidly reach accurate classification decisions. We first find optimal parameters that allow efficient sampling in simulation and then evaluate our proposed strategy against the two existing ones using 100 randomized simulation and 10 real experiments. We find that our proposed method compels the swarm to make decisions at an accelerated rate, with an improvement of up to 20.52% in mean decision time at only 0.78% loss in accuracy.
Optimization and Evaluation of Multi Robot Surface Inspection Through Particle Swarm Optimization
Oct 04, 2023



Robot swarms can be tasked with a variety of automated sensing and inspection applications in aerial, aquatic, and surface environments. In this paper, we study a simplified two-outcome surface inspection task. We task a group of robots to inspect and collectively classify a 2D surface section based on a binary pattern projected on the surface. We use a decentralized Bayesian decision-making algorithm and deploy a swarm of miniature 3-cm sized wheeled robots to inspect randomized black and white tiles of $1m\times 1m$. We first describe the model parameters that characterize our simulated environment, the robot swarm, and the inspection algorithm. We then employ a noise-resistant heuristic optimization scheme based on the Particle Swarm Optimization (PSO) using a fitness evaluation that combines decision accuracy and decision time. We use our fitness measure definition to asses the optimized parameters through 100 randomized simulations that vary surface pattern and initial robot poses. The optimized algorithm parameters show up to a 55% improvement in median of fitness evaluations against an empirically chosen parameter set.