 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStrategic Sacrifice: Self-Organized Robot Swarm Localization for Inspection Productivity
Nov 14, 2024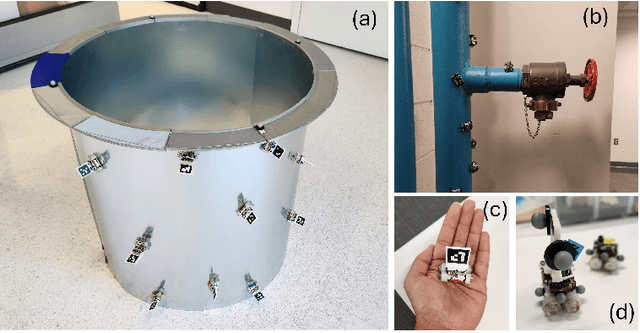
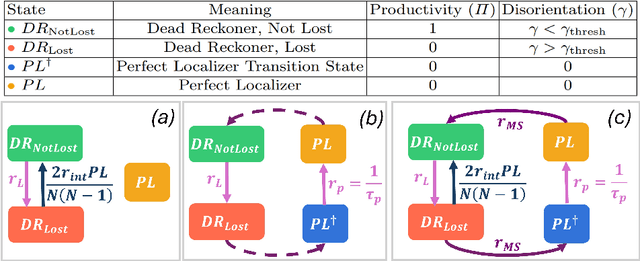
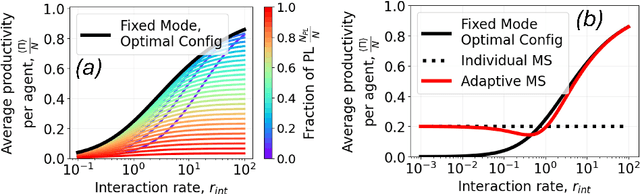
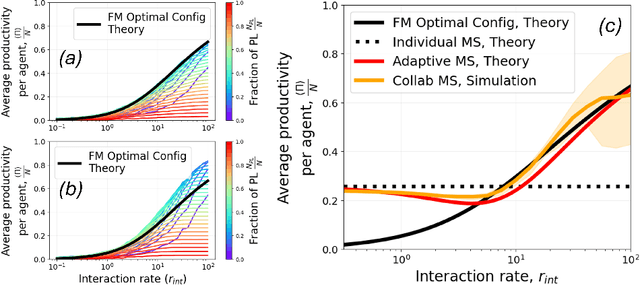
Robot swarms offer significant potential for inspecting diverse infrastructure, ranging from bridges to space stations. However, effective inspection requires accurate robot localization, which demands substantial computational resources and limits productivity. Inspired by biological systems, we introduce a novel cooperative localization mechanism that minimizes collective computation expenditure through self-organized sacrifice. Here, a few agents bear the computational burden of localization; through local interactions, they improve the inspection productivity of the swarm. Our approach adaptively maximizes inspection productivity for unconstrained trajectories in dynamic interaction and environmental settings. We demonstrate the optimality and robustness using mean-field analytical models, multi-agent simulations, and hardware experiments with metal climbing robots inspecting a 3D cylinder.
Leader-Follower 3D Formation for Underwater Robots
Oct 30, 2024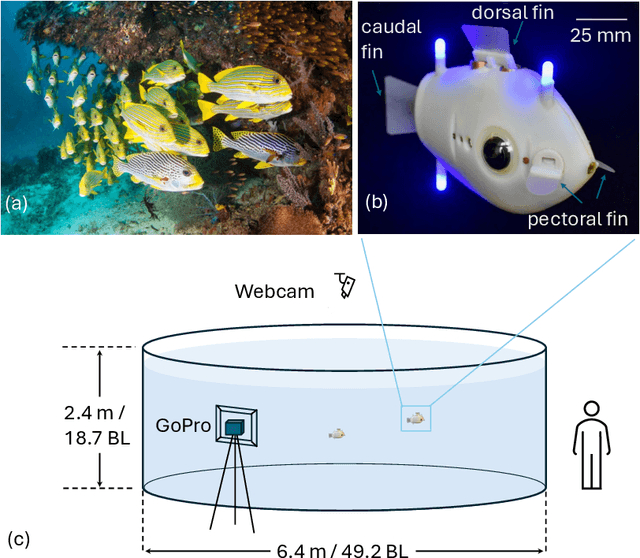
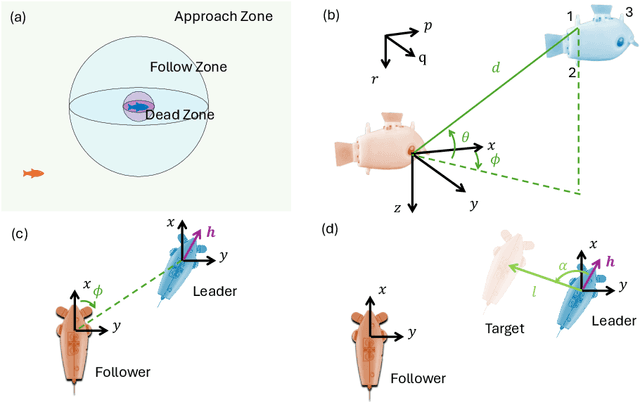
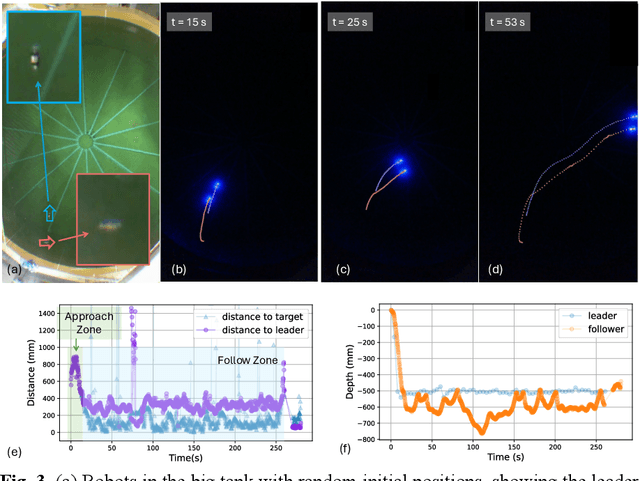
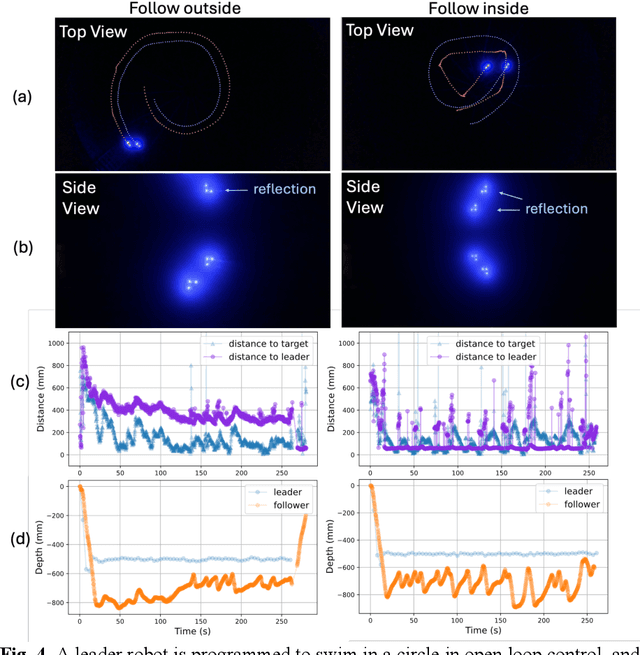
The schooling behavior of fish is hypothesized to confer many survival benefits, including foraging success, safety from predators, and energy savings through hydrodynamic interactions when swimming in formation. Underwater robot collectives may be able to achieve similar benefits in future applications, e.g. using formation control to achieve efficient spatial sampling for environmental monitoring. Although many theoretical algorithms exist for multi-robot formation control, they have not been tested in the underwater domain due to the fundamental challenges in underwater communication. Here we introduce a leader-follower strategy for underwater formation control that allows us to realize complex 3D formations, using purely vision-based perception and a reactive control algorithm that is low computation. We use a physical platform, BlueSwarm, to demonstrate for the first time an experimental realization of inline, side-by-side, and staggered swimming 3D formations. More complex formations are studied in a physics-based simulator, providing new insights into the convergence and stability of formations given underwater inertial/drag conditions. Our findings lay the groundwork for future applications of underwater robot swarms in aquatic environments with minimal communication.
Collective Bayesian Decision-Making in a Swarm of Miniaturized Robots for Surface Inspection
Apr 12, 2024



Robot swarms can effectively serve a variety of sensing and inspection applications. Certain inspection tasks require a binary classification decision. This work presents an experimental setup for a surface inspection task based on vibration sensing and studies a Bayesian two-outcome decision-making algorithm in a swarm of miniaturized wheeled robots. The robots are tasked with individually inspecting and collectively classifying a 1mx1m tiled surface consisting of vibrating and non-vibrating tiles based on the majority type of tiles. The robots sense vibrations using onboard IMUs and perform collision avoidance using a set of IR sensors. We develop a simulation and optimization framework leveraging the Webots robotic simulator and a Particle Swarm Optimization (PSO) method. We consider two existing information sharing strategies and propose a new one that allows the swarm to rapidly reach accurate classification decisions. We first find optimal parameters that allow efficient sampling in simulation and then evaluate our proposed strategy against the two existing ones using 100 randomized simulation and 10 real experiments. We find that our proposed method compels the swarm to make decisions at an accelerated rate, with an improvement of up to 20.52% in mean decision time at only 0.78% loss in accuracy.
Optimization and Evaluation of Multi Robot Surface Inspection Through Particle Swarm Optimization
Oct 04, 2023



Robot swarms can be tasked with a variety of automated sensing and inspection applications in aerial, aquatic, and surface environments. In this paper, we study a simplified two-outcome surface inspection task. We task a group of robots to inspect and collectively classify a 2D surface section based on a binary pattern projected on the surface. We use a decentralized Bayesian decision-making algorithm and deploy a swarm of miniature 3-cm sized wheeled robots to inspect randomized black and white tiles of $1m\times 1m$. We first describe the model parameters that characterize our simulated environment, the robot swarm, and the inspection algorithm. We then employ a noise-resistant heuristic optimization scheme based on the Particle Swarm Optimization (PSO) using a fitness evaluation that combines decision accuracy and decision time. We use our fitness measure definition to asses the optimized parameters through 100 randomized simulations that vary surface pattern and initial robot poses. The optimized algorithm parameters show up to a 55% improvement in median of fitness evaluations against an empirically chosen parameter set.
Long-Lived Distributed Relative Localization of Robot Swarms
Dec 06, 2013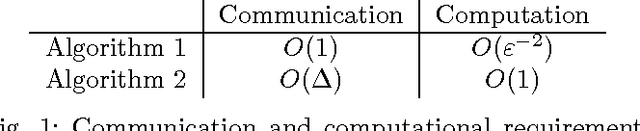
This paper studies the problem of having mobile robots in a multi-robot system maintain an estimate of the relative position and relative orientation of near-by robots in the environment. This problem is studied in the context of large swarms of simple robots which are capable of measuring only the distance to near-by robots. We present two distributed localization algorithms with different trade-offs between their computational complexity and their coordination requirements. The first algorithm does not require the robots to coordinate their motion. It relies on a non-linear least squares based strategy to allow robots to compute the relative pose of near-by robots. The second algorithm borrows tools from distributed computing theory to coordinate which robots must remain stationary and which robots are allowed to move. This coordination allows the robots to use standard trilateration techniques to compute the relative pose of near-by robots. Both algorithms are analyzed theoretically and validated through simulations.