 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStrategic Sacrifice: Self-Organized Robot Swarm Localization for Inspection Productivity
Paper and Code
Nov 14, 2024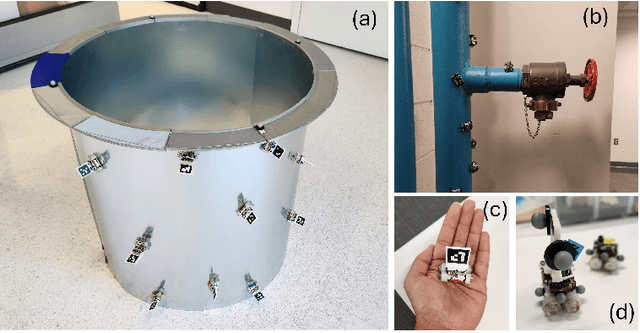
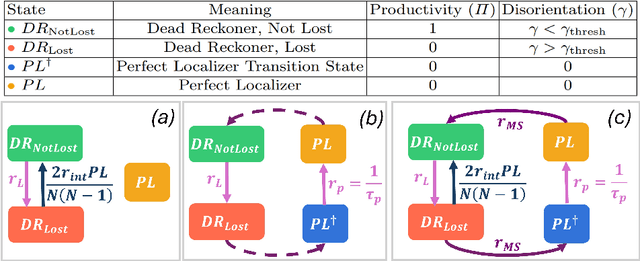
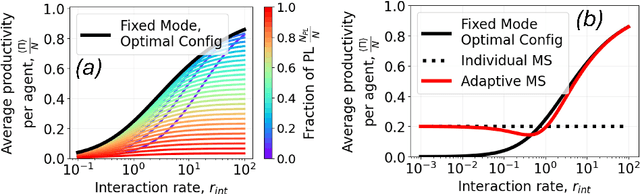
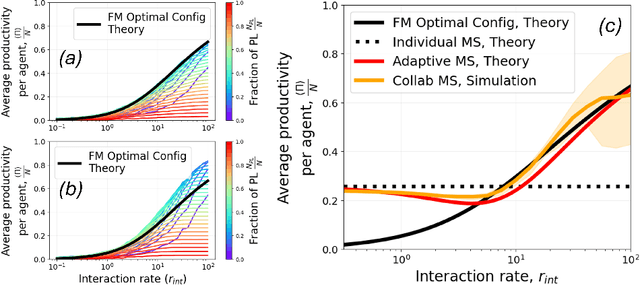
Robot swarms offer significant potential for inspecting diverse infrastructure, ranging from bridges to space stations. However, effective inspection requires accurate robot localization, which demands substantial computational resources and limits productivity. Inspired by biological systems, we introduce a novel cooperative localization mechanism that minimizes collective computation expenditure through self-organized sacrifice. Here, a few agents bear the computational burden of localization; through local interactions, they improve the inspection productivity of the swarm. Our approach adaptively maximizes inspection productivity for unconstrained trajectories in dynamic interaction and environmental settings. We demonstrate the optimality and robustness using mean-field analytical models, multi-agent simulations, and hardware experiments with metal climbing robots inspecting a 3D cylinder.