 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStrategic Sacrifice: Self-Organized Robot Swarm Localization for Inspection Productivity
Nov 14, 2024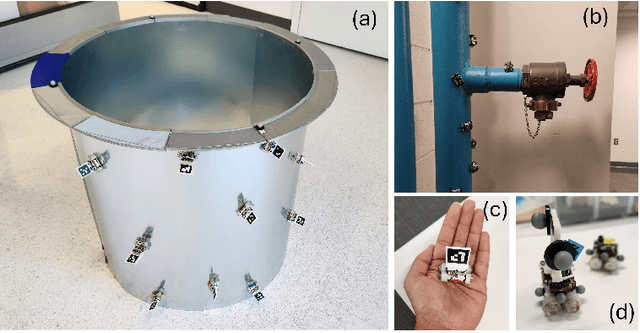
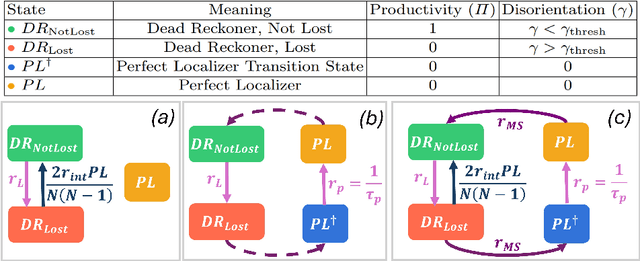
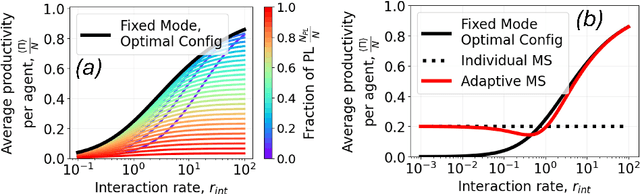
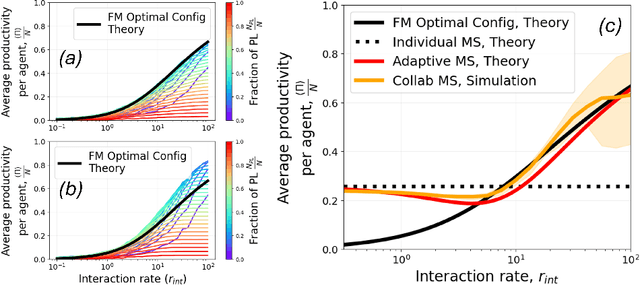
Robot swarms offer significant potential for inspecting diverse infrastructure, ranging from bridges to space stations. However, effective inspection requires accurate robot localization, which demands substantial computational resources and limits productivity. Inspired by biological systems, we introduce a novel cooperative localization mechanism that minimizes collective computation expenditure through self-organized sacrifice. Here, a few agents bear the computational burden of localization; through local interactions, they improve the inspection productivity of the swarm. Our approach adaptively maximizes inspection productivity for unconstrained trajectories in dynamic interaction and environmental settings. We demonstrate the optimality and robustness using mean-field analytical models, multi-agent simulations, and hardware experiments with metal climbing robots inspecting a 3D cylinder.
Leader-Follower 3D Formation for Underwater Robots
Oct 30, 2024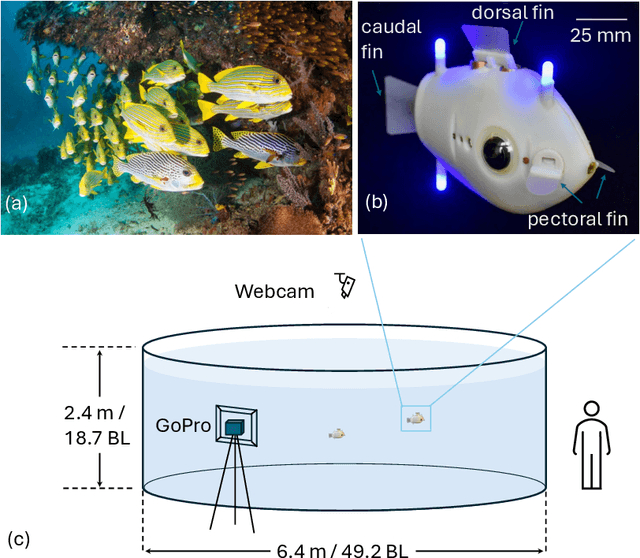
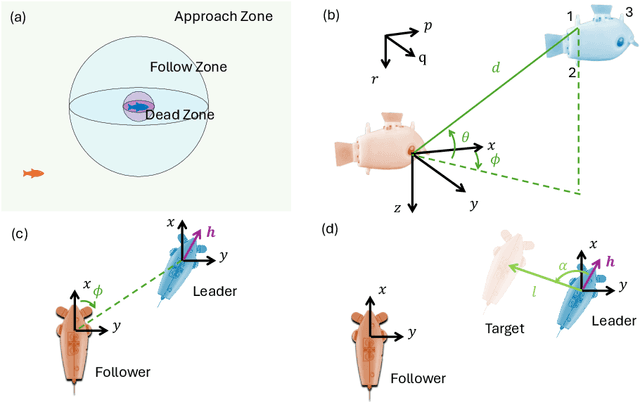
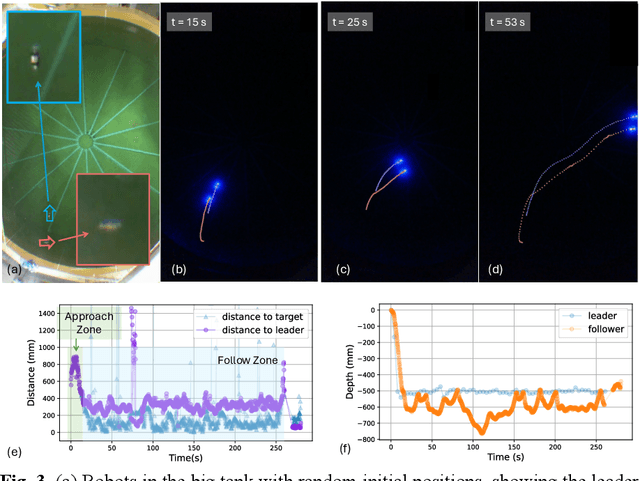
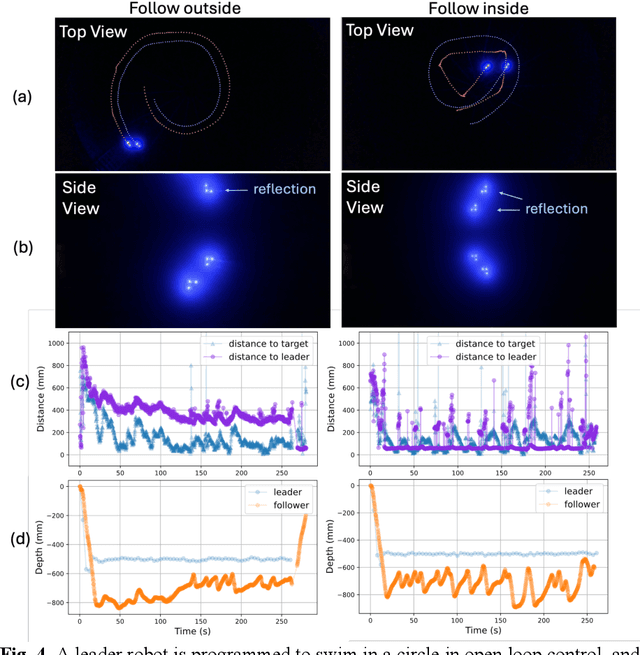
The schooling behavior of fish is hypothesized to confer many survival benefits, including foraging success, safety from predators, and energy savings through hydrodynamic interactions when swimming in formation. Underwater robot collectives may be able to achieve similar benefits in future applications, e.g. using formation control to achieve efficient spatial sampling for environmental monitoring. Although many theoretical algorithms exist for multi-robot formation control, they have not been tested in the underwater domain due to the fundamental challenges in underwater communication. Here we introduce a leader-follower strategy for underwater formation control that allows us to realize complex 3D formations, using purely vision-based perception and a reactive control algorithm that is low computation. We use a physical platform, BlueSwarm, to demonstrate for the first time an experimental realization of inline, side-by-side, and staggered swimming 3D formations. More complex formations are studied in a physics-based simulator, providing new insights into the convergence and stability of formations given underwater inertial/drag conditions. Our findings lay the groundwork for future applications of underwater robot swarms in aquatic environments with minimal communication.