 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKilovolt Pyroelectric Voltage Generation and Electrostatic Actuation With Fluidic Heating
Nov 04, 2024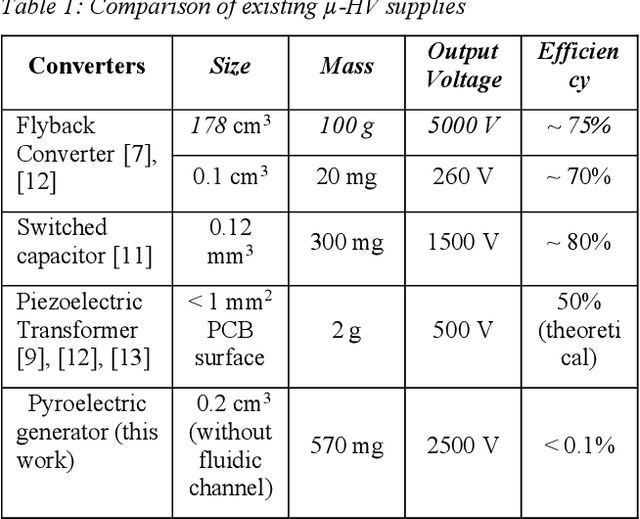
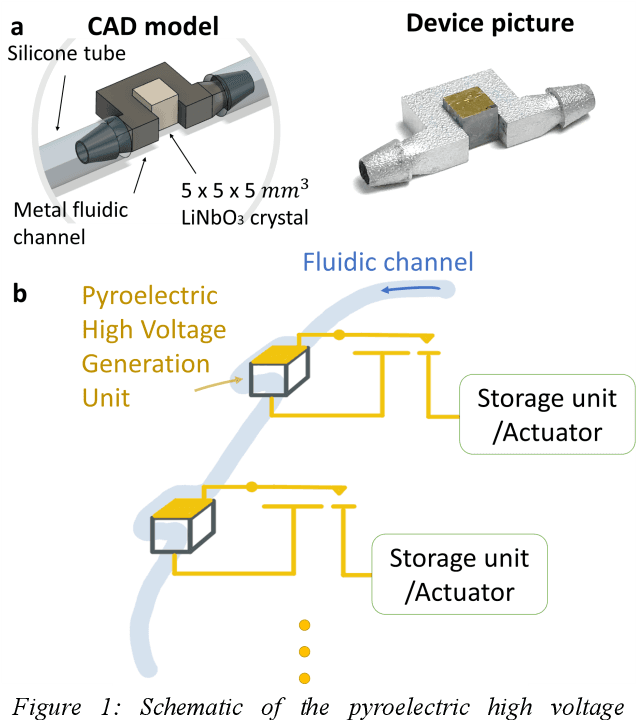
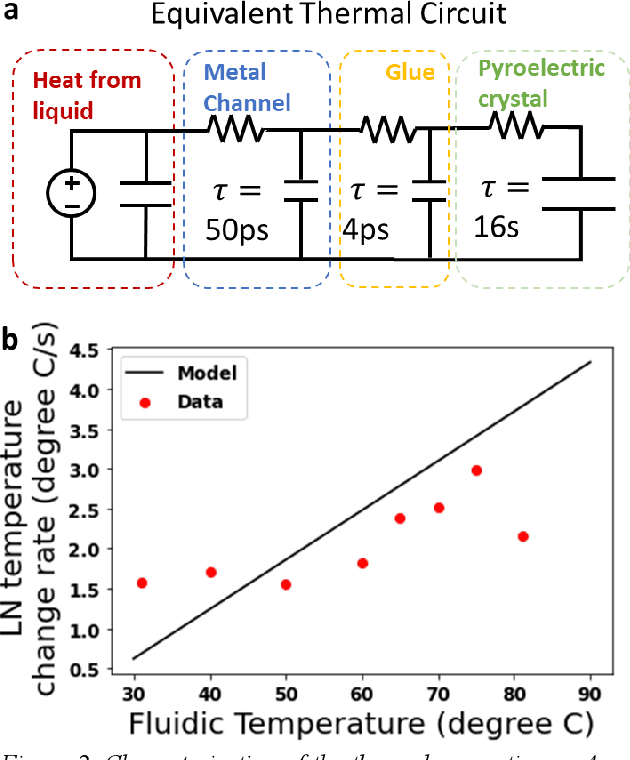
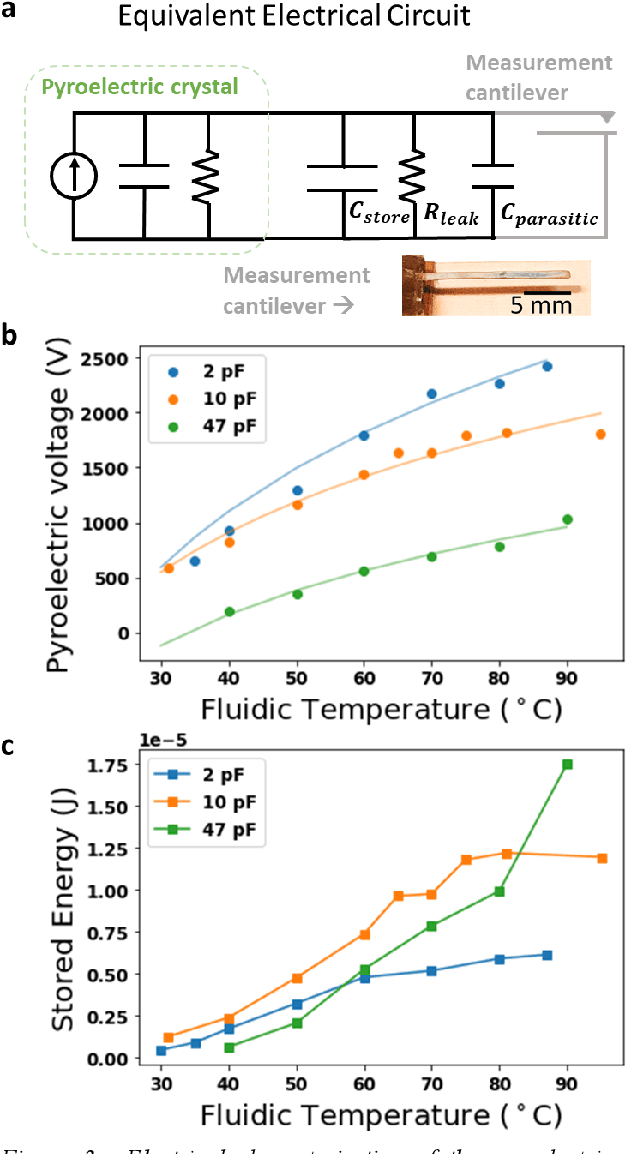
Integrated micro power generators are crucial components for micro robotic platforms to demonstrate untethered operation and to achieve autonomy. Current micro robotic electrostatic actuators typically require hundreds to thousands of voltages to output sufficient work. Pyroelectricity is one such source of high voltages that can be scaled to small form factors. This paper demonstrates a distributed pyroelectric high voltage generation mechanism to power kV actuators using alternating exposure of crystals to hot and cold water (300C to 900C water temperature). Using this fluidic temperature control, a pyroelectrically generated voltage of 2470 V was delivered to a 2 pF storage capacitor yielding a 6.10 {\mu}J stored energy. A maximum energy of 17.46 {\mu}J was delivered to a 47 pF capacitor at 861 V. The recirculating water can be used to heat a distributed array of converters to generate electricity in distant robotic actuator sections. The development of this distributed system would enable untethered micro-robot to be operated with a flexible body and free of battery recharging, which advances its applications in the real world.
Leader-Follower 3D Formation for Underwater Robots
Oct 30, 2024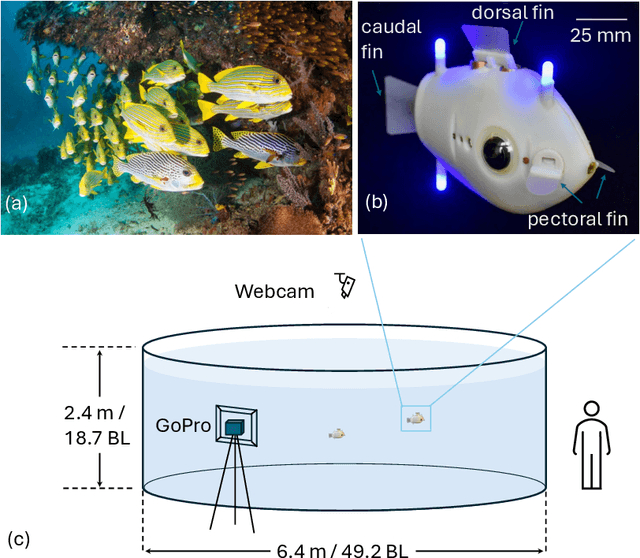
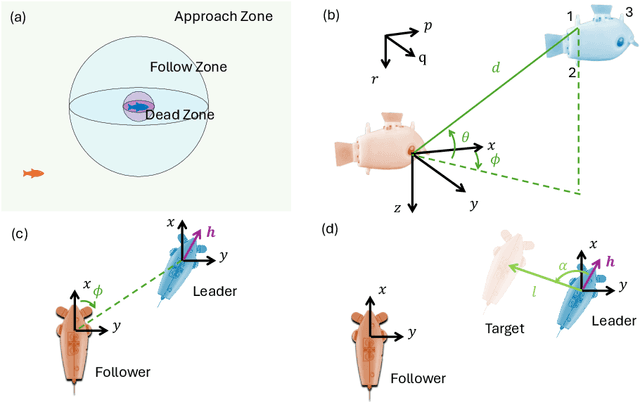
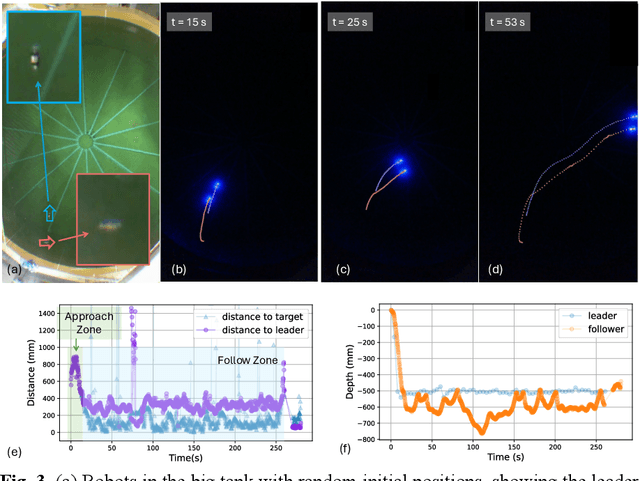
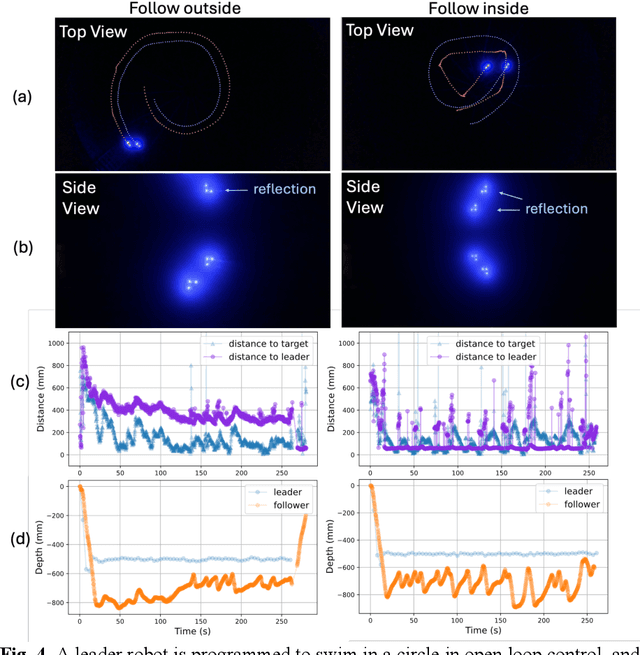
The schooling behavior of fish is hypothesized to confer many survival benefits, including foraging success, safety from predators, and energy savings through hydrodynamic interactions when swimming in formation. Underwater robot collectives may be able to achieve similar benefits in future applications, e.g. using formation control to achieve efficient spatial sampling for environmental monitoring. Although many theoretical algorithms exist for multi-robot formation control, they have not been tested in the underwater domain due to the fundamental challenges in underwater communication. Here we introduce a leader-follower strategy for underwater formation control that allows us to realize complex 3D formations, using purely vision-based perception and a reactive control algorithm that is low computation. We use a physical platform, BlueSwarm, to demonstrate for the first time an experimental realization of inline, side-by-side, and staggered swimming 3D formations. More complex formations are studied in a physics-based simulator, providing new insights into the convergence and stability of formations given underwater inertial/drag conditions. Our findings lay the groundwork for future applications of underwater robot swarms in aquatic environments with minimal communication.
Robotic Dough Shaping
Jul 31, 2022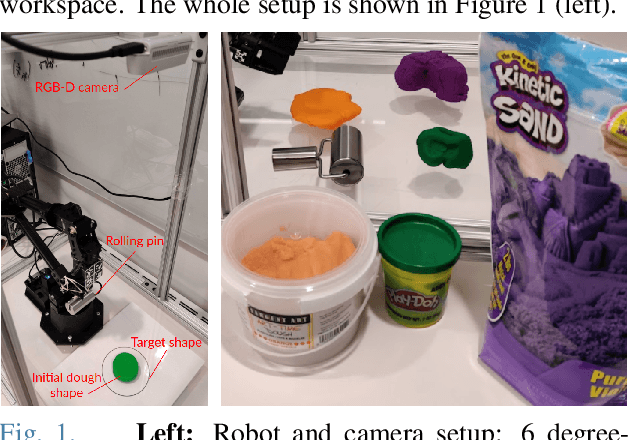
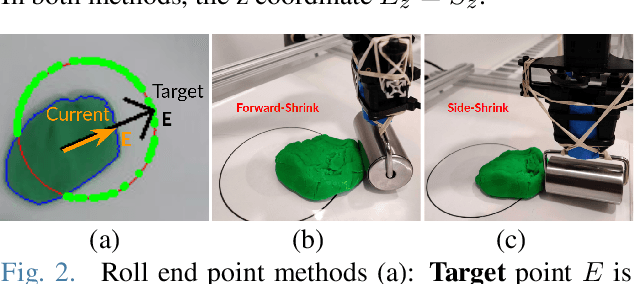
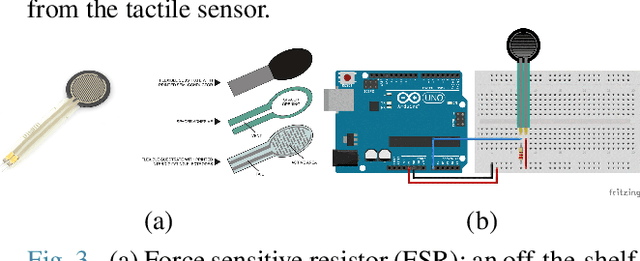
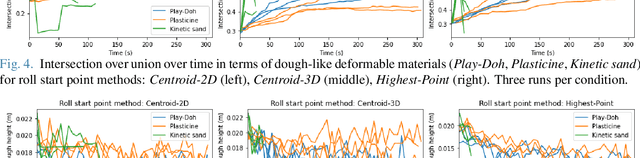
We address the problem of shaping a piece of dough-like deformable material into a 2D target shape presented upfront. We use a 6 degree-of-freedom WidowX-250 Robot Arm equipped with a rolling pin and information collected from an RGB-D camera and a tactile sensor. We present and compare several control policies, including a dough shrinking action, in extensive experiments across three kinds of deformable materials and across three target dough shape sizes, achieving the intersection over union (IoU) of 0.90. Our results show that: i) rolling dough from the highest dough point is more efficient than from the 2D/3D dough centroid; ii) it might be better to stop the roll movement at the current dough boundary as opposed to the target shape outline; iii) the shrink action might be beneficial only if properly tuned with respect to the exapand action; and iv) the Play-Doh material is easier to shape to a target shape as compared to Plasticine or Kinetic sand. Video demonstrations of our work are available at https://youtu.be/ZzLMxuITdt4