 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Simple Approach to Differentiable Rendering of SDFs
May 14, 2024

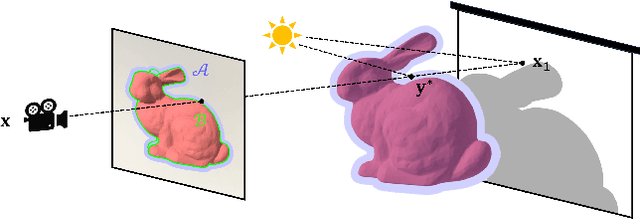
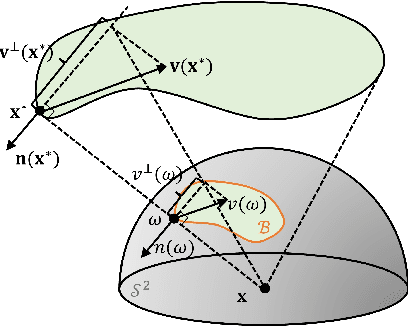
We present a simple algorithm for differentiable rendering of surfaces represented by Signed Distance Fields (SDF), which makes it easy to integrate rendering into gradient-based optimization pipelines. To tackle visibility-related derivatives that make rendering non-differentiable, existing physically based differentiable rendering methods often rely on elaborate guiding data structures or reparameterization with a global impact on variance. In this article, we investigate an alternative that embraces nonzero bias in exchange for low variance and architectural simplicity. Our method expands the lower-dimensional boundary integral into a thin band that is easy to sample when the underlying surface is represented by an SDF. We demonstrate the performance and robustness of our formulation in end-to-end inverse rendering tasks, where it obtains results that are competitive with or superior to existing work.
Robotic Dough Shaping
Jul 31, 2022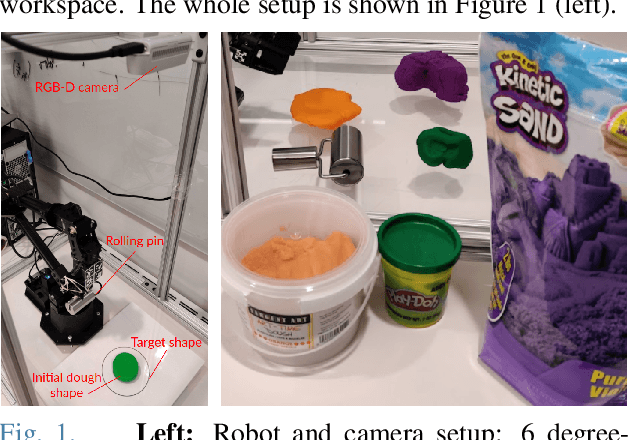
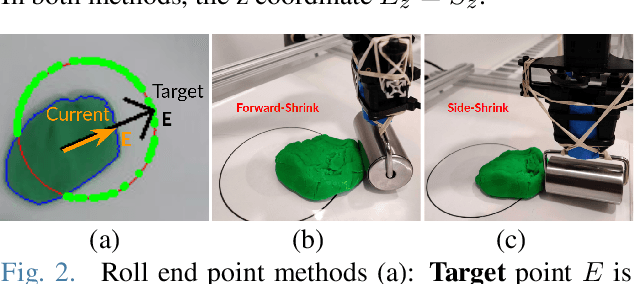
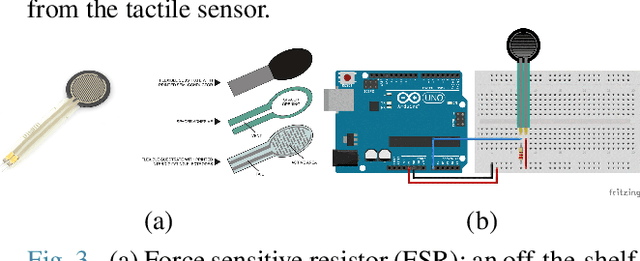
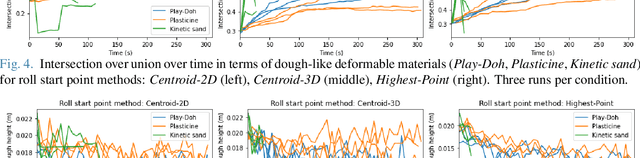
We address the problem of shaping a piece of dough-like deformable material into a 2D target shape presented upfront. We use a 6 degree-of-freedom WidowX-250 Robot Arm equipped with a rolling pin and information collected from an RGB-D camera and a tactile sensor. We present and compare several control policies, including a dough shrinking action, in extensive experiments across three kinds of deformable materials and across three target dough shape sizes, achieving the intersection over union (IoU) of 0.90. Our results show that: i) rolling dough from the highest dough point is more efficient than from the 2D/3D dough centroid; ii) it might be better to stop the roll movement at the current dough boundary as opposed to the target shape outline; iii) the shrink action might be beneficial only if properly tuned with respect to the exapand action; and iv) the Play-Doh material is easier to shape to a target shape as compared to Plasticine or Kinetic sand. Video demonstrations of our work are available at https://youtu.be/ZzLMxuITdt4