 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Particle Automata: Learning Self-Organizing Particle Dynamics
Jan 22, 2026We introduce Neural Particle Automata (NPA), a Lagrangian generalization of Neural Cellular Automata (NCA) from static lattices to dynamic particle systems. Unlike classical Eulerian NCA where cells are pinned to pixels or voxels, NPA model each cell as a particle with a continuous position and internal state, both updated by a shared, learnable neural rule. This particle-based formulation yields clear individuation of cells, allows heterogeneous dynamics, and concentrates computation only on regions where activity is present. At the same time, particle systems pose challenges: neighborhoods are dynamic, and a naive implementation of local interactions scale quadratically with the number of particles. We address these challenges by replacing grid-based neighborhood perception with differentiable Smoothed Particle Hydrodynamics (SPH) operators backed by memory-efficient, CUDA-accelerated kernels, enabling scalable end-to-end training. Across tasks including morphogenesis, point-cloud classification, and particle-based texture synthesis, we show that NPA retain key NCA behaviors such as robustness and self-regeneration, while enabling new behaviors specific to particle systems. Together, these results position NPA as a compact neural model for learning self-organizing particle dynamics.
A Radiance Field Loss for Fast and Simple Emissive Surface Reconstruction
Jan 27, 2025We present a fast and simple technique to convert images into an emissive surface-based scene representation. Building on existing emissive volume reconstruction algorithms, we introduce a subtle yet impactful modification of the loss function requiring changes to only a few lines of code: instead of integrating the radiance field along rays and supervising the resulting images, we project the training images into the scene to directly supervise the spatio-directional radiance field. The primary outcome of this change is the complete removal of alpha blending and ray marching from the image formation model, instead moving these steps into the loss computation. In addition to promoting convergence to surfaces, this formulation assigns explicit semantic meaning to 2D subsets of the radiance field, turning them into well-defined emissive surfaces. We finally extract a level set from this representation, which results in a high-quality emissive surface model. Our method retains much of the speed and quality of the baseline algorithm. For instance, a suitably modified variant of Instant~NGP maintains comparable computational efficiency, while achieving an average PSNR that is only 0.1 dB lower. Most importantly, our method generates explicit surfaces in place of an exponential volume, doing so with a level of simplicity not seen in prior work.
A Simple Approach to Differentiable Rendering of SDFs
May 14, 2024

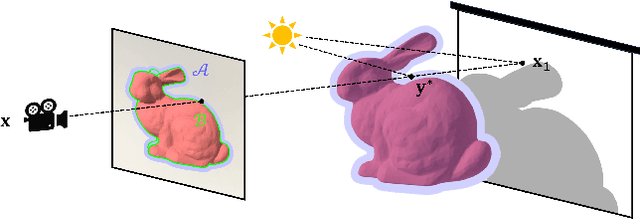
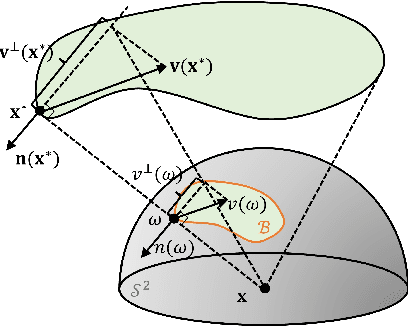
We present a simple algorithm for differentiable rendering of surfaces represented by Signed Distance Fields (SDF), which makes it easy to integrate rendering into gradient-based optimization pipelines. To tackle visibility-related derivatives that make rendering non-differentiable, existing physically based differentiable rendering methods often rely on elaborate guiding data structures or reparameterization with a global impact on variance. In this article, we investigate an alternative that embraces nonzero bias in exchange for low variance and architectural simplicity. Our method expands the lower-dimensional boundary integral into a thin band that is easy to sample when the underlying surface is represented by an SDF. We demonstrate the performance and robustness of our formulation in end-to-end inverse rendering tasks, where it obtains results that are competitive with or superior to existing work.
Wide-Depth-Range 6D Object Pose Estimation in Space
Apr 01, 2021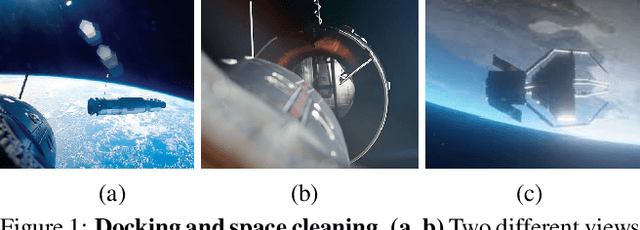
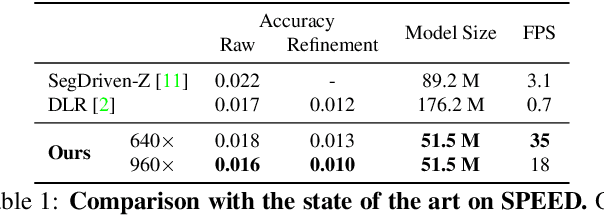
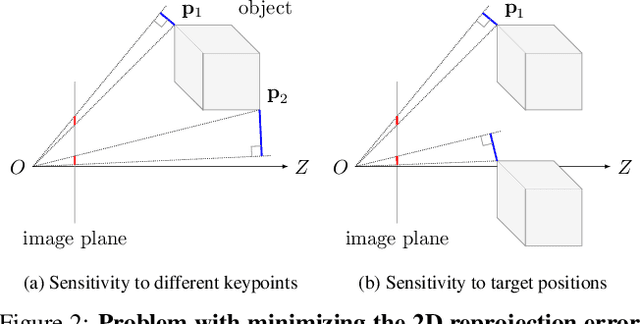
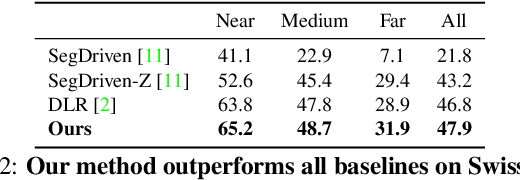
6D pose estimation in space poses unique challenges that are not commonly encountered in the terrestrial setting. One of the most striking differences is the lack of atmospheric scattering, allowing objects to be visible from a great distance while complicating illumination conditions. Currently available benchmark datasets do not place a sufficient emphasis on this aspect and mostly depict the target in close proximity. Prior work tackling pose estimation under large scale variations relies on a two-stage approach to first estimate scale, followed by pose estimation on a resized image patch. We instead propose a single-stage hierarchical end-to-end trainable network that is more robust to scale variations. We demonstrate that it outperforms existing approaches not only on images synthesized to resemble images taken in space but also on standard benchmarks.