 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVelocity-free task-space regulator for robot manipulators with external disturbances
Mar 04, 2025This paper addresses the problem of task-space robust regulation of robot manipulators subject to external disturbances. A velocity-free control law is proposed by combining the internal model principle and the passivity-based output-feedback control approach. The developed output-feedback controller ensures not only asymptotic convergence of the regulation error but also suppression of unwanted external step/sinusoidal disturbances. The potential of the proposed method lies in its simplicity, intuitively appealing, and simple gain selection criteria for synthesis of multi-joint robot manipulator control systems.
Distributed formation control for manipulator end-effectors
Jul 08, 2021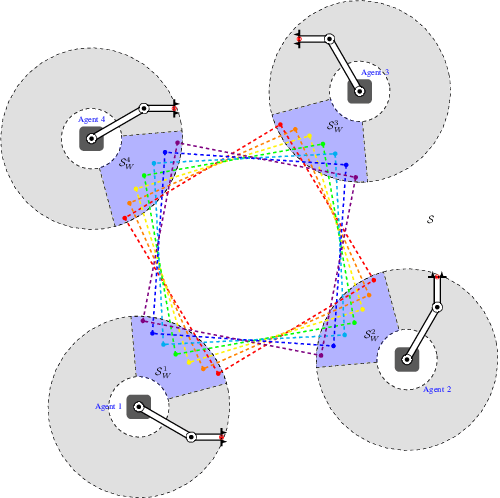
We present three classes of distributed formation controllers for achieving and maintaining the 2D/3D formation shape of manipulator end-effectors to cope with different scenarios due to availability of modeling parameters. We firstly present a distributed formation controller for manipulators whose system parameters are perfectly known. The formation control objective is achieved by assigning virtual springs between end-effectors and by adding damping terms at joints, which provides a clear physical interpretation of the proposed solution. Subsequently, we extend it to the case where manipulator kinematic and system parameters are not exactly known. An extra integrator and an adaptive estimator are introduced for gravitational compensation and stabilization, respectively. Simulation results with planar manipulators and with seven degree-of-freedom humanoid manipulator arms are presented to illustrate the effectiveness of the proposed approach.
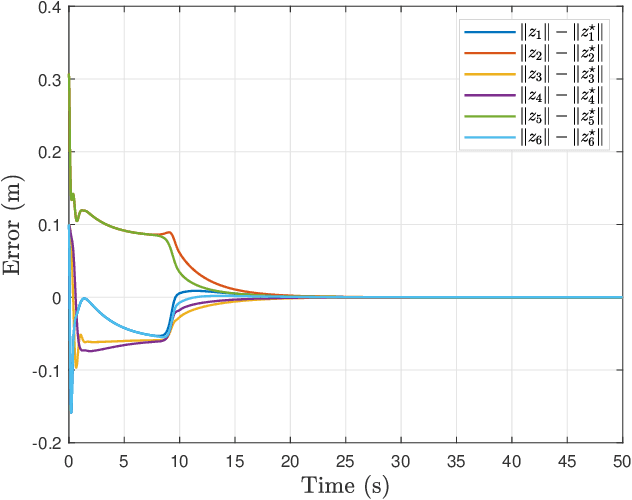
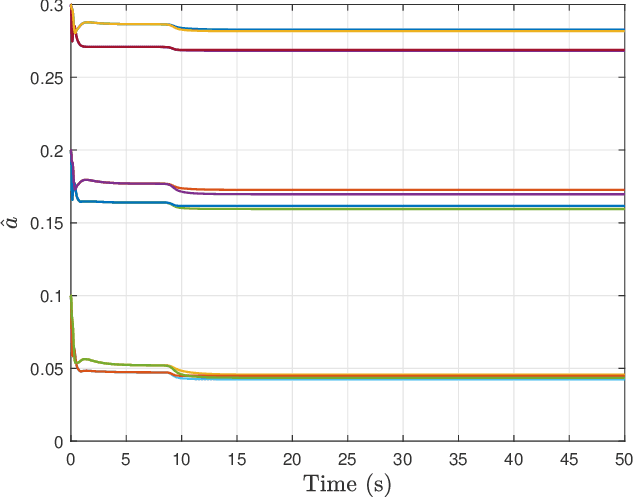
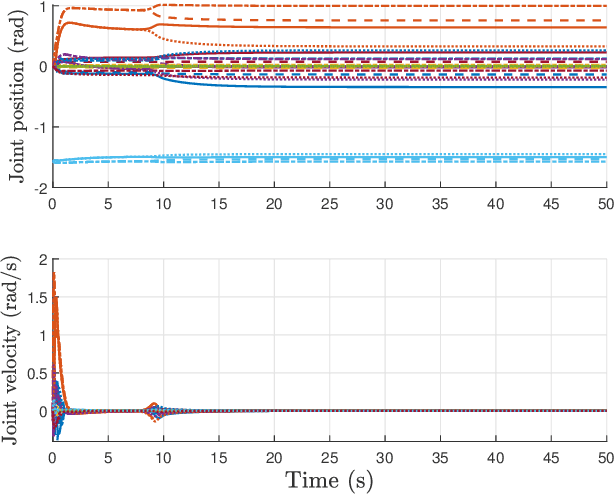
Distributed formation control of manipulators' end-effector with internal model-based disturbance rejection
Mar 26, 2021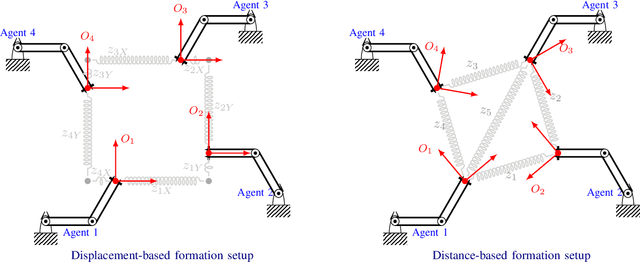
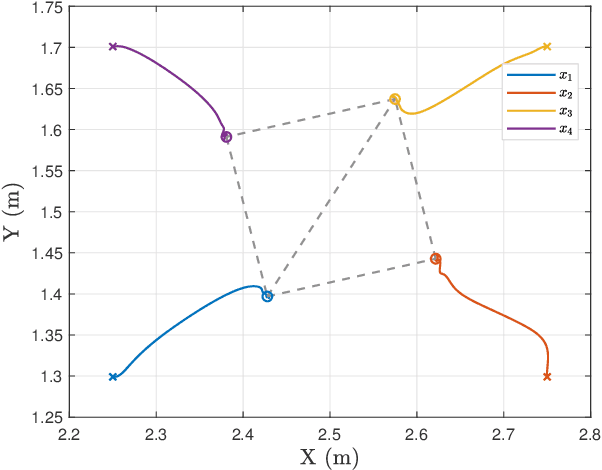
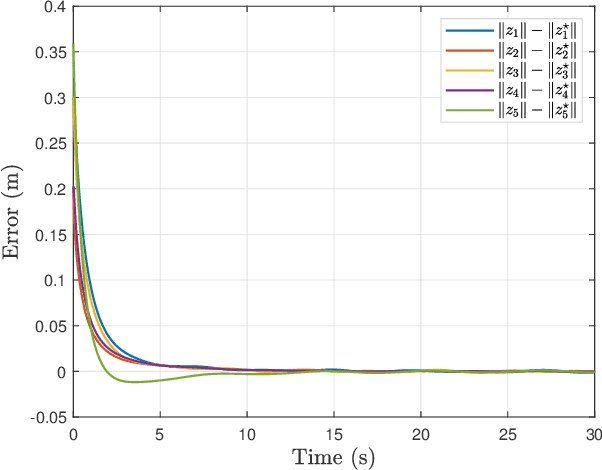
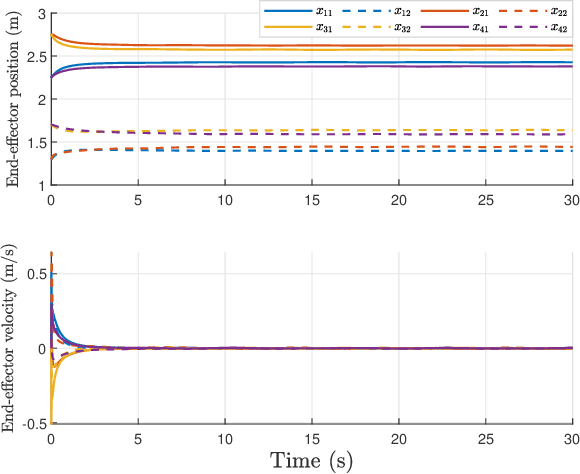
This paper addresses the problem of end-effector formation control for manipulators that are subjected to external disturbances: input disturbance torques and disturbance forces at each end-effector. The disturbances are assumed to be non-vanishing and are superposition of finite number of sinusoidal and step signals. The formation control objective is achieved by assigning virtual springs between end-effectors, by adding damping terms at joints, and by incorporating internal model-based dynamic compensators to counteract the effect of the disturbances; all of which presents a clear physical interpretation of the proposed approach. Simulation results are presented to illustrate the effectiveness of the proposed approach.