 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVersatile Distributed Maneuvering with Generalized Formations using Guiding Vector Fields
May 09, 2025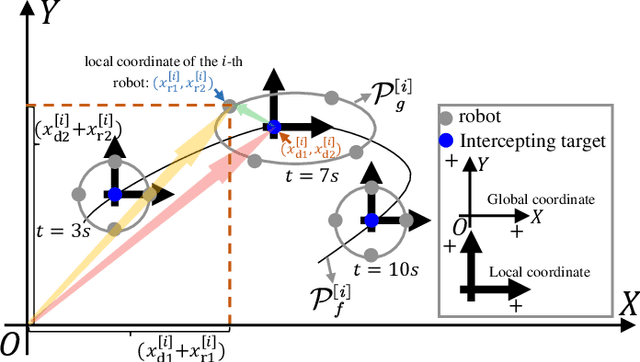
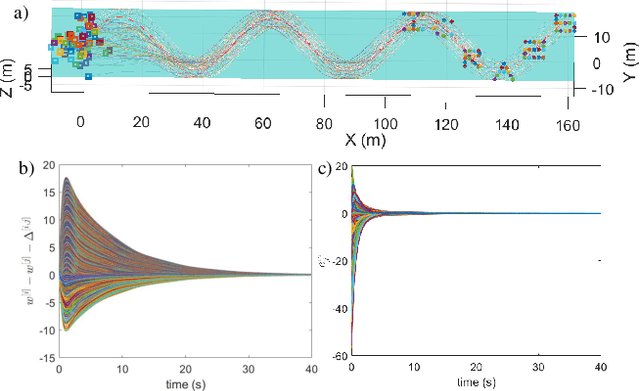
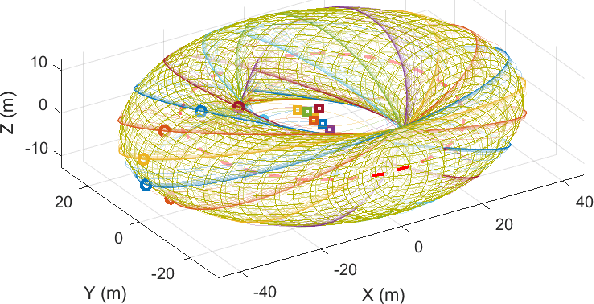
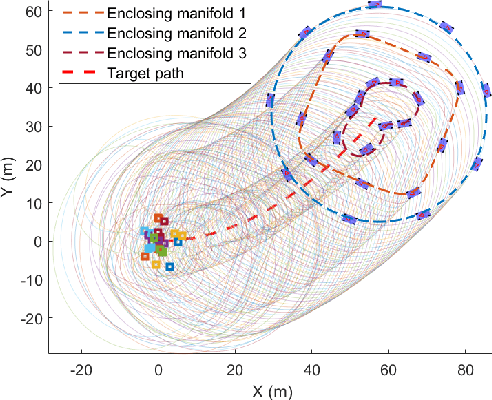
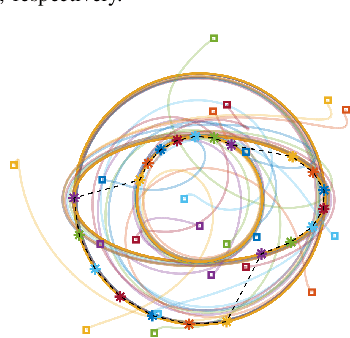
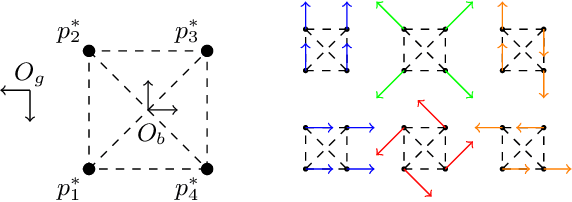
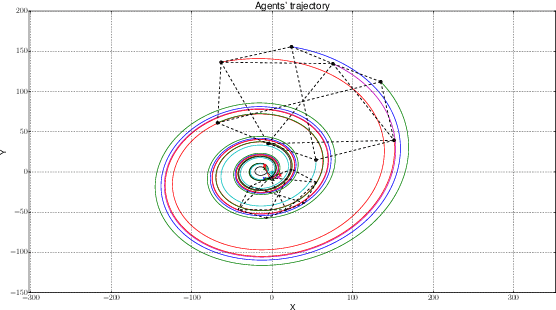
This paper presents a unified approach to realize versatile distributed maneuvering with generalized formations. Specifically, we decompose the robots' maneuvers into two independent components, i.e., interception and enclosing, which are parameterized by two independent virtual coordinates. Treating these two virtual coordinates as dimensions of an abstract manifold, we derive the corresponding singularity-free guiding vector field (GVF), which, along with a distributed coordination mechanism based on the consensus theory, guides robots to achieve various motions (i.e., versatile maneuvering), including (a) formation tracking, (b) target enclosing, and (c) circumnavigation. Additional motion parameters can generate more complex cooperative robot motions. Based on GVFs, we design a controller for a nonholonomic robot model. Besides the theoretical results, extensive simulations and experiments are performed to validate the effectiveness of the approach.
Source-Seeking Problem with Robot Swarms
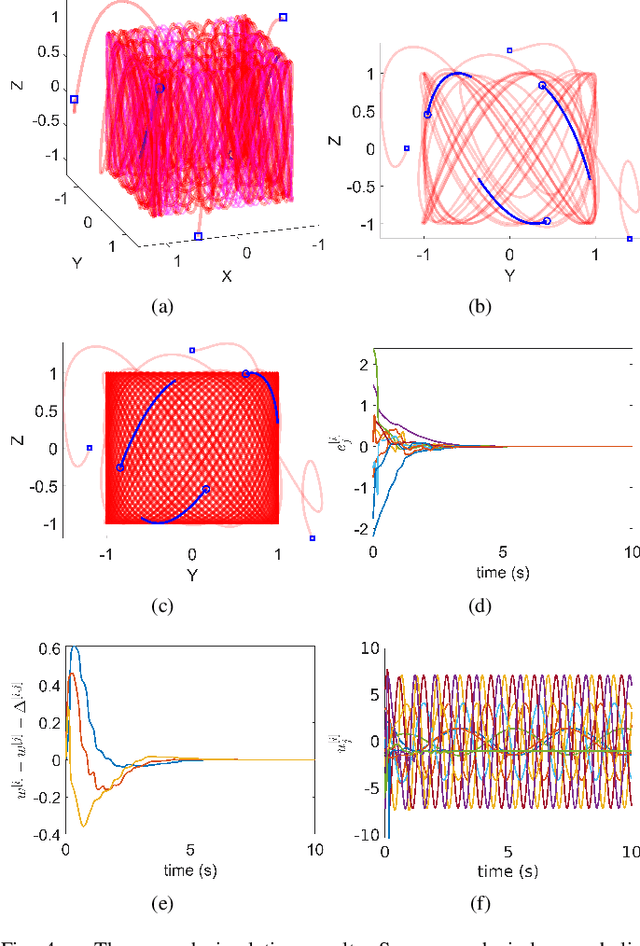
Aug 19, 2024We present an algorithm to solve the problem of locating the source, or maxima, of a scalar field using a robot swarm. We demonstrate how the robot swarm determines its direction of movement to approach the source using only field intensity measurements taken by each robot. In contrast with the current literature, our algorithm accommodates a generic (non-degenerate) geometry for the swarm's formation. Additionally, we rigorously show the effectiveness of the algorithm even when the dynamics of the robots are complex, such as a unicycle with constant speed. Not requiring a strict geometry for the swarm significantly enhances its resilience. For example, this allows the swarm to change its size and formation in the presence of obstacles or other real-world factors, including the loss or addition of individuals to the swarm on the fly. For clarity, the article begins by presenting the algorithm for robots with free dynamics. In the second part, we demonstrate the algorithm's effectiveness even considering non-holonomic dynamics for the robots, using the vector field guidance paradigm. Finally, we verify and validate our algorithm with various numerical simulations.
SO(3) attitude controllers and the alignment of robots with non-constant 3D vector fields
Jun 21, 2024



This technical note aims to introduce geometric controllers to roboticists for aligning \emph{3D robots} with non-constant 3D vector fields. This alignment entails the control of the robot's 3D attitude. We derive with excessive detail all the calculations needed for the analysis and implementation of the controllers.
Resilient source seeking with robot swarms
Sep 06, 2023



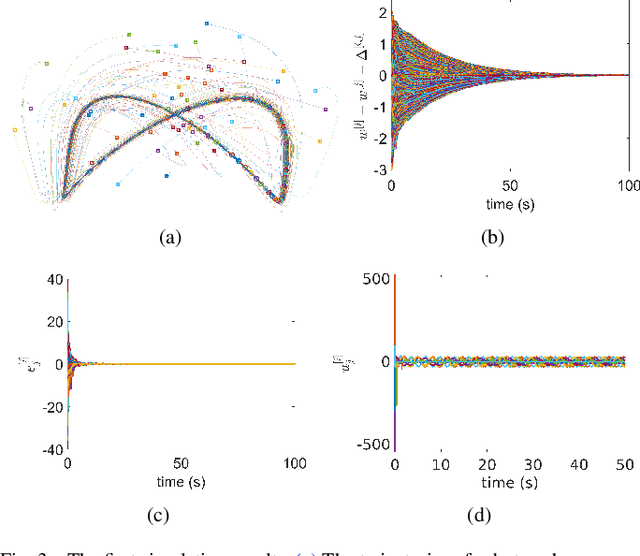
We present a solution for locating the source, or maximum, of an unknown scalar field using a swarm of mobile robots. Unlike relying on the traditional gradient information, the swarm determines an ascending direction to approach the source with arbitrary precision. The ascending direction is calculated from measurements of the field strength at the robot locations and their relative positions concerning the centroid. Rather than focusing on individual robots, we focus the analysis on the density of robots per unit area to guarantee a more resilient swarm, i.e., the functionality remains even if individuals go missing or are misplaced during the mission. We reinforce the robustness of the algorithm by providing sufficient conditions for the swarm shape so that the ascending direction is almost parallel to the gradient. The swarm can respond to an unexpected environment by morphing its shape and exploiting the existence of multiple ascending directions. Finally, we validate our approach numerically with hundreds of robots. The fact that a large number of robots always calculate an ascending direction compensates for the loss of individuals and mitigates issues arising from the actuator and sensor noises.
Guiding vector fields for the distributed motion coordination of mobile robots
Sep 20, 2022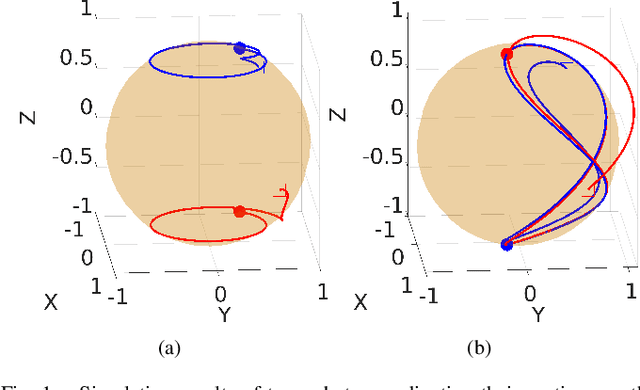

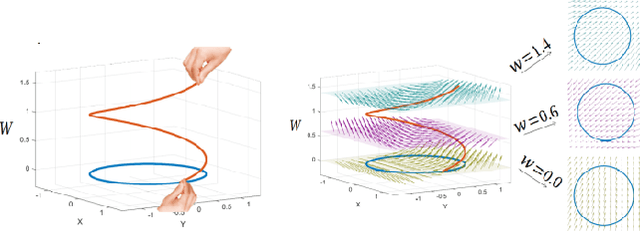
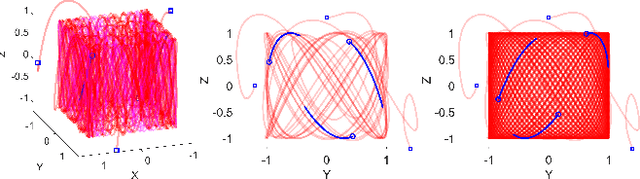
We propose coordinating guiding vector fields to achieve two tasks simultaneously with a team of robots: first, the guidance and navigation of multiple robots to possibly different paths or surfaces typically embedded in 2D or 3D; second, their motion coordination while tracking their prescribed paths or surfaces. The motion coordination is defined by desired parametric displacements between robots on the path or surface. Such a desired displacement is achieved by controlling the virtual coordinates, which correspond to the path or surface's parameters, between guiding vector fields. Rigorous mathematical guarantees underpinned by dynamical systems theory and Lyapunov theory are provided for the effective distributed motion coordination and navigation of robots on paths or surfaces from all initial positions. As an example for practical robotic applications, we derive a control algorithm from the proposed coordinating guiding vector fields for a Dubins-car-like model with actuation saturation. Our proposed algorithm is distributed and scalable to an arbitrary number of robots. Furthermore, extensive illustrative simulations and fixed-wing aircraft outdoor experiments validate the effectiveness and robustness of our algorithm.
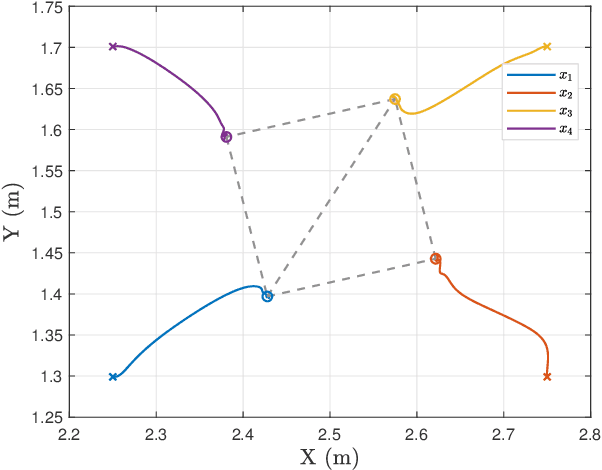
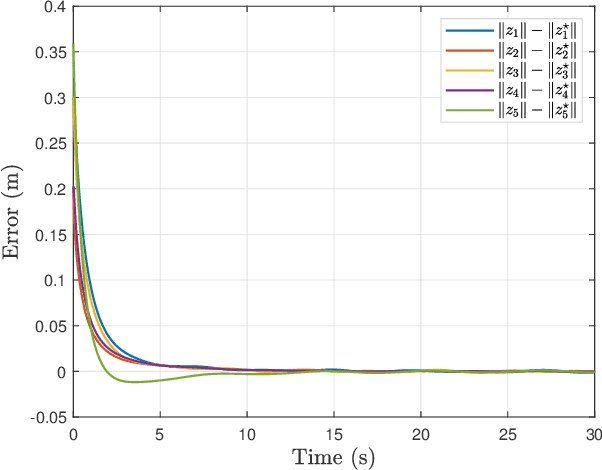
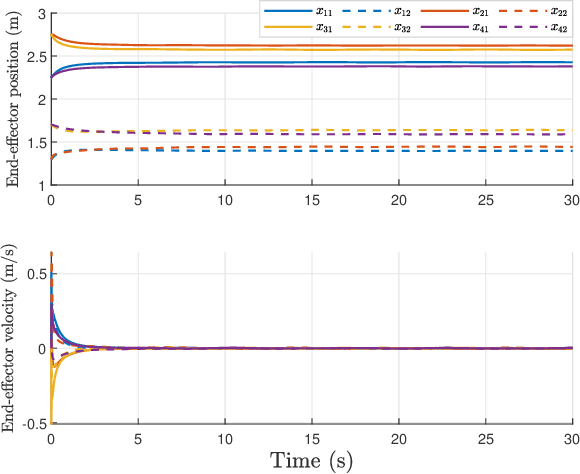
Distributed formation control for manipulator end-effectors
Jul 08, 2021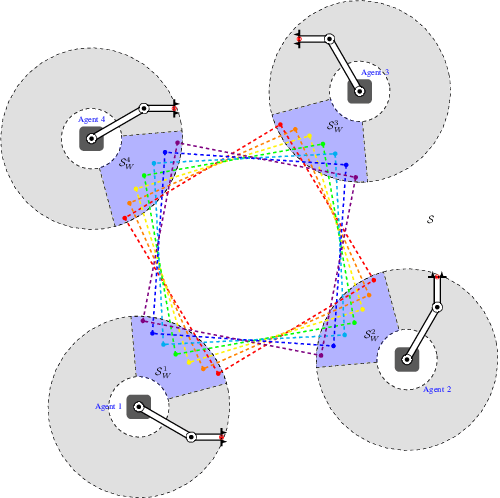
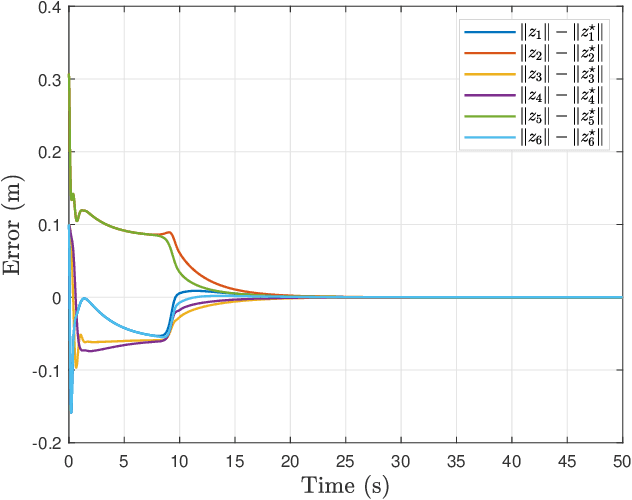
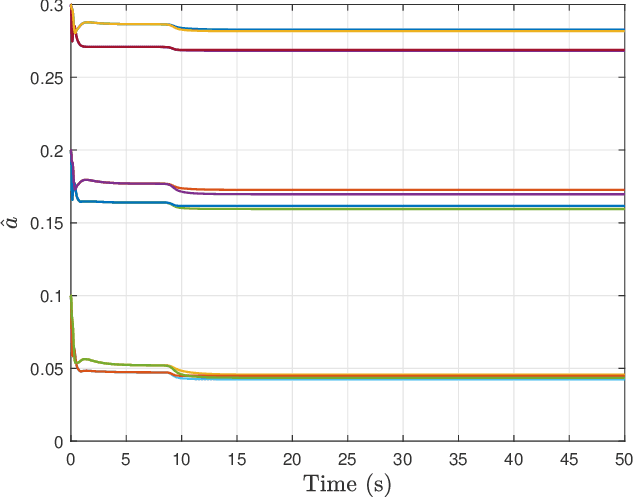
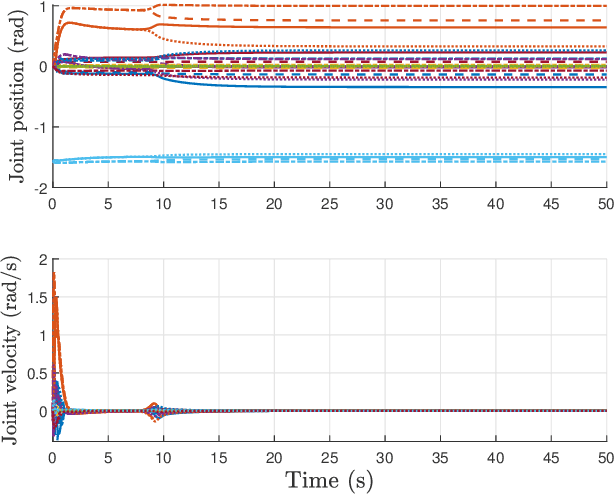
We present three classes of distributed formation controllers for achieving and maintaining the 2D/3D formation shape of manipulator end-effectors to cope with different scenarios due to availability of modeling parameters. We firstly present a distributed formation controller for manipulators whose system parameters are perfectly known. The formation control objective is achieved by assigning virtual springs between end-effectors and by adding damping terms at joints, which provides a clear physical interpretation of the proposed solution. Subsequently, we extend it to the case where manipulator kinematic and system parameters are not exactly known. An extra integrator and an adaptive estimator are introduced for gravitational compensation and stabilization, respectively. Simulation results with planar manipulators and with seven degree-of-freedom humanoid manipulator arms are presented to illustrate the effectiveness of the proposed approach.
Guiding vector fields in Paparazzi autopilot
Jun 20, 2021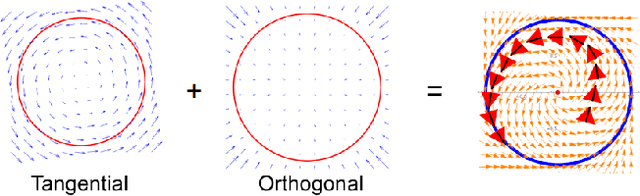
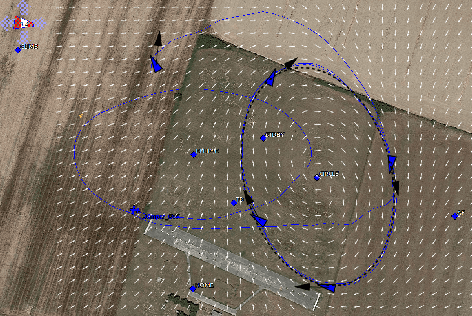

This article is a technical report on the two different guidance systems based on vector fields that can be found in Paparazzi, a free sw/hw autopilot. Guiding vector fields allow autonomous vehicles to track paths described by the user mathematically. In particular, we allow two descriptions of the path with an implicit or a parametric function. Each description is associated with its corresponding guiding vector field algorithm. The implementations of the two algorithms are light enough to be run in a modern microcontroller. We will cover the basic theory on how they work, how a user can implement its own paths in Paparazzi, how to exploit them to coordinate multiple vehicles, and we finish with some experimental results. Although the presented implementation is focused on fixed-wing aircraft, the guidance is also applicable to other kinds of aerial vehicles such as rotorcraft.
Distributed coordinated path following using guiding vector fields
Apr 09, 2021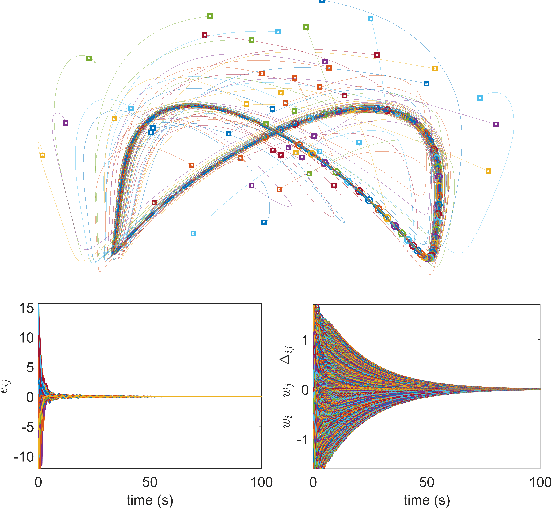

It is essential in many applications to impose a scalable coordinated motion control on a large group of mobile robots, which is efficient in tasks requiring repetitive execution, such as environmental monitoring. In this paper, we design a guiding vector field to guide multiple robots to follow possibly different desired paths while coordinating their motions. The vector field uses a path parameter as a virtual coordinate that is communicated among neighboring robots. Then, the virtual coordinate is utilized to control the relative parametric displacement between robots along the paths. This enables us to design a saturated control algorithm for a Dubins-car-like model. The algorithm is distributed, scalable, and applicable for any smooth paths in an $n$-dimensional configuration space, and global convergence is guaranteed. Simulations with up to fifty robots and outdoor experiments with fixed-wing aircraft validate the theoretical results.
Leaderless collective motions in affine formation control
Apr 07, 2021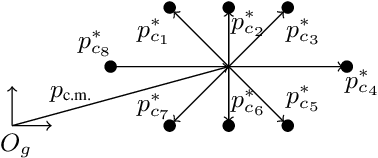

This paper proposes a novel distributed technique to induce collective motions in affine formation control. Instead of the traditional leader-follower strategy, we propose modifying the original weights that build the Laplacian matrix so that a designed steady-state motion of the desired shape emerges from the agents' local interactions. The proposed technique allows a rich collection of collective motions such as rotations around the centroid, translations, scalings, and shearings of a reference shape. These motions can be applied in useful collective behaviors such as \emph{shaped} consensus (the rendezvous with a particular shape), escorting one of the team agents, or area coverage. We prove the global stability and effectiveness of our proposed technique rigorously, and we provide some illustrative numerical simulations.
Distributed formation control of manipulators' end-effector with internal model-based disturbance rejection
Mar 26, 2021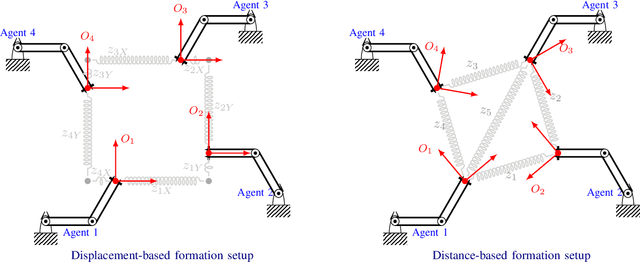
This paper addresses the problem of end-effector formation control for manipulators that are subjected to external disturbances: input disturbance torques and disturbance forces at each end-effector. The disturbances are assumed to be non-vanishing and are superposition of finite number of sinusoidal and step signals. The formation control objective is achieved by assigning virtual springs between end-effectors, by adding damping terms at joints, and by incorporating internal model-based dynamic compensators to counteract the effect of the disturbances; all of which presents a clear physical interpretation of the proposed approach. Simulation results are presented to illustrate the effectiveness of the proposed approach.