 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVersatile Distributed Maneuvering with Generalized Formations using Guiding Vector Fields
May 09, 2025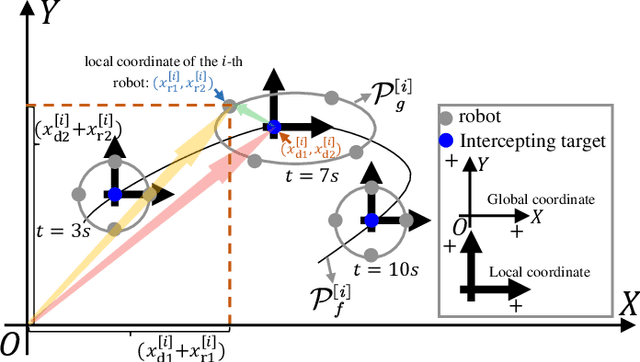
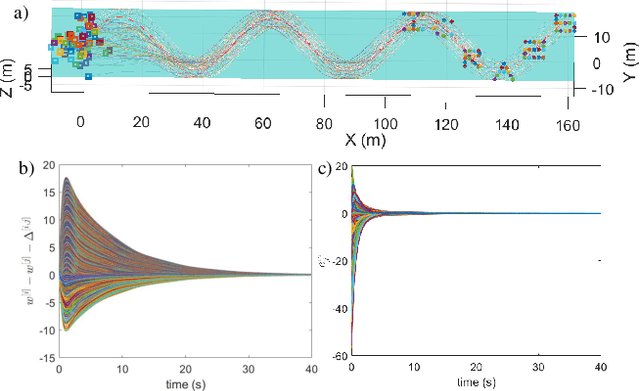
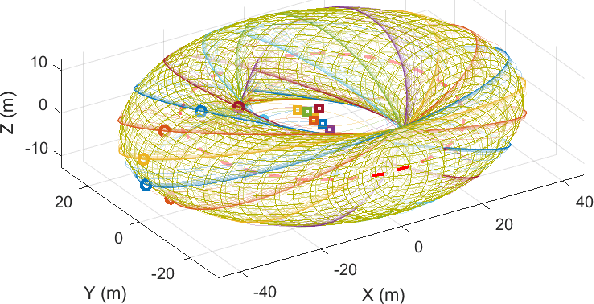
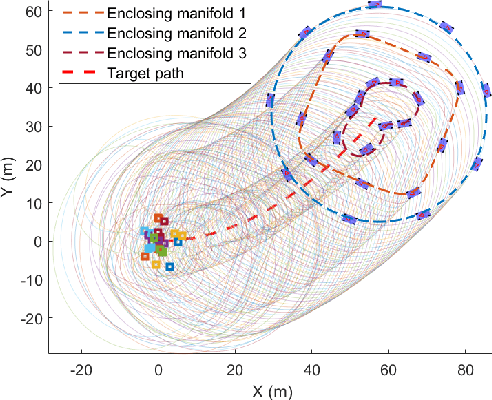
This paper presents a unified approach to realize versatile distributed maneuvering with generalized formations. Specifically, we decompose the robots' maneuvers into two independent components, i.e., interception and enclosing, which are parameterized by two independent virtual coordinates. Treating these two virtual coordinates as dimensions of an abstract manifold, we derive the corresponding singularity-free guiding vector field (GVF), which, along with a distributed coordination mechanism based on the consensus theory, guides robots to achieve various motions (i.e., versatile maneuvering), including (a) formation tracking, (b) target enclosing, and (c) circumnavigation. Additional motion parameters can generate more complex cooperative robot motions. Based on GVFs, we design a controller for a nonholonomic robot model. Besides the theoretical results, extensive simulations and experiments are performed to validate the effectiveness of the approach.
HI-GVF: Shared Control based on Human-Influenced Guiding Vector Fields for Human-multi-robot Cooperation
Feb 17, 2025
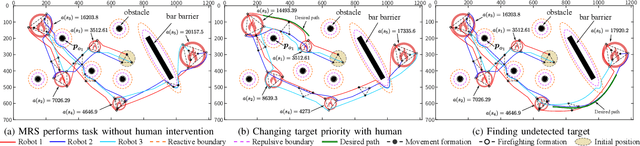
Human-multi-robot shared control leverages human decision-making and robotic autonomy to enhance human-robot collaboration. While widely studied, existing systems often adopt a leader-follower model, limiting robot autonomy to some extent. Besides, a human is required to directly participate in the motion control of robots through teleoperation, which significantly burdens the operator. To alleviate these two issues, we propose a layered shared control computing framework using human-influenced guiding vector fields (HI-GVF) for human-robot collaboration. HI-GVF guides the multi-robot system along a desired path specified by the human. Then, an intention field is designed to merge the human and robot intentions, accelerating the propagation of the human intention within the multi-robot system. Moreover, we give the stability analysis of the proposed model and use collision avoidance based on safety barrier certificates to fine-tune the velocity. Eventually, considering the firefighting task as an example scenario, we conduct simulations and experiments using multiple human-robot interfaces (brain-computer interface, myoelectric wristband, eye-tracking), and the results demonstrate that our proposed approach boosts the effectiveness and performance of the task.
Consensus-Based Dynamic Task Allocation for Multi-Robot System Considering Payloads Consumption
Dec 13, 2024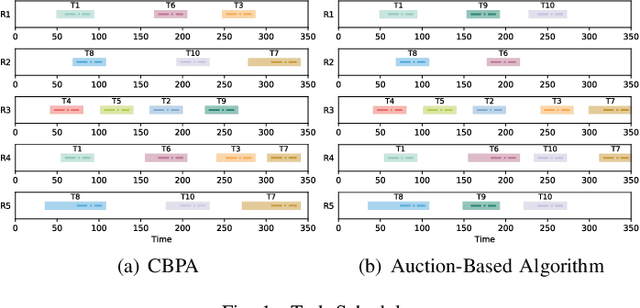
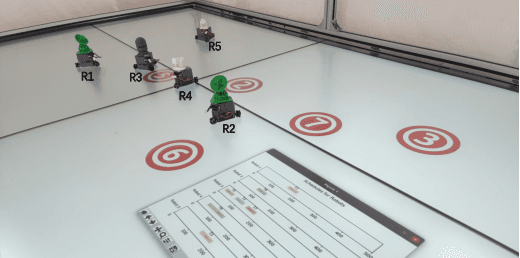
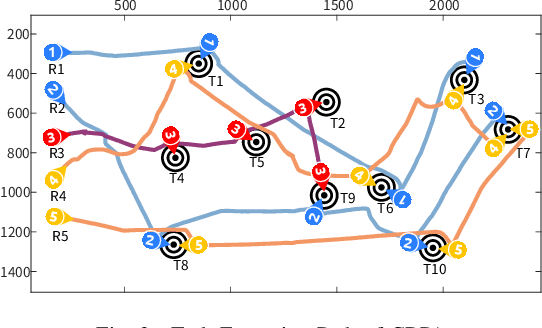
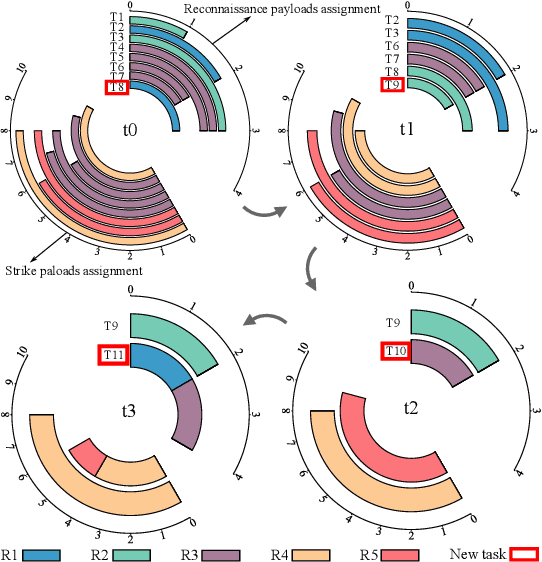
This paper presents a consensus-based payload algorithm (CBPA) to deal with the condition of robots' capability decrease for multi-robot task allocation. During the execution of complex tasks, robots' capabilities could decrease with the consumption of payloads, which causes a problem that the robot coalition would not meet the tasks' requirements in real time. The proposed CBPA is an enhanced version of the consensus-based bundle algorithm (CBBA) and comprises two primary core phases: the payload bundle construction and consensus phases. In the payload bundle construction phase, CBPA introduces a payload assignment matrix to track the payloads carried by the robots and the demands of multi-robot tasks in real time. Then, robots share their respective payload assignment matrix in the consensus phase. These two phases are iterated to dynamically adjust the number of robots performing multi-robot tasks and the number of tasks each robot performs and obtain conflict-free results to ensure that the robot coalition meets the demand and completes all tasks as quickly as possible. Physical experiment shows that CBPA is appropriate in complex and dynamic scenarios where robots need to collaborate and task requirements are tightly coupled to the robots' payloads. Numerical experiments show that CBPA has higher total task gains than CBBA.
SPF-EMPC Planner: A real-time multi-robot trajectory planner for complex environments with uncertainties
Oct 17, 2024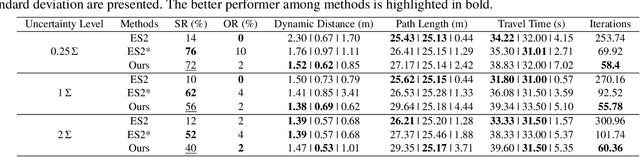
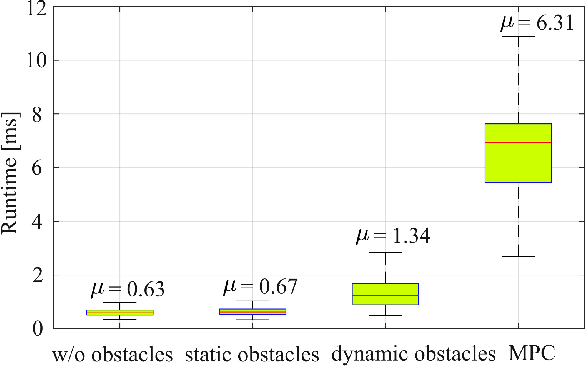
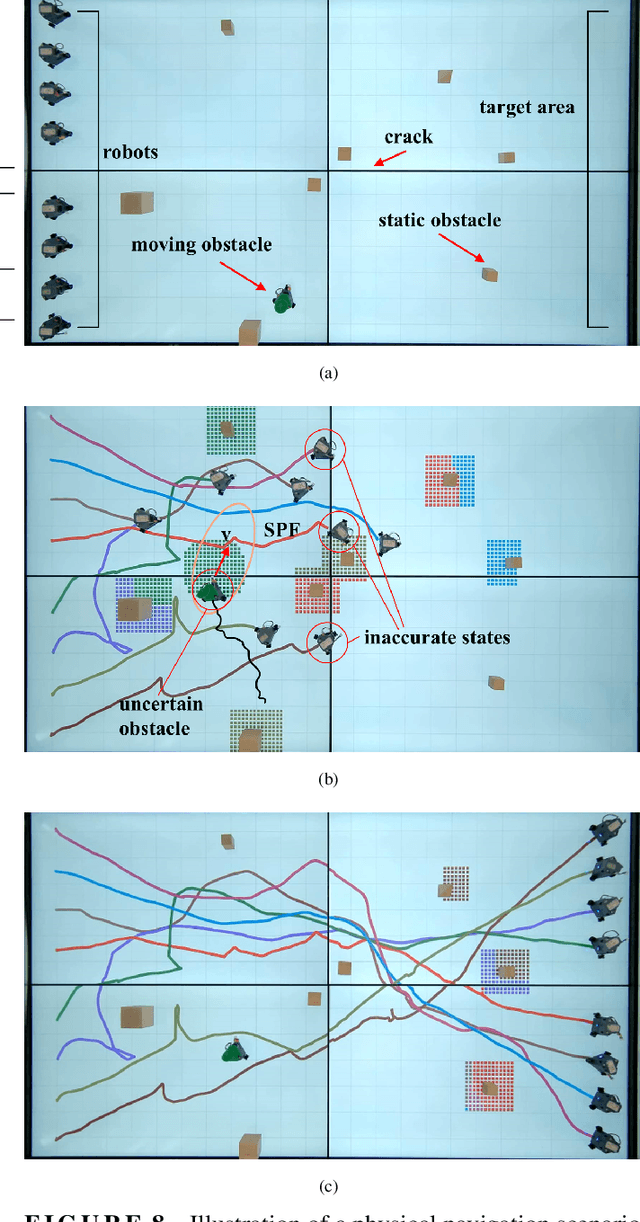
In practical applications, the unpredictable movement of obstacles and the imprecise state observation of robots introduce significant uncertainties for the swarm of robots, especially in cluster environments. However, existing methods are difficult to realize safe navigation, considering uncertainties, complex environmental structures, and robot swarms. This paper introduces an extended state model predictive control planner with a safe probability field to address the multi-robot navigation problem in complex, dynamic, and uncertain environments. Initially, the safe probability field offers an innovative approach to model the uncertainty of external dynamic obstacles, combining it with an unconstrained optimization method to generate safe trajectories for multi-robot online. Subsequently, the extended state model predictive controller can accurately track these generated trajectories while considering the robots' inherent model constraints and state uncertainty, thus ensuring the practical feasibility of the planned trajectories. Simulation experiments show a success rate four times higher than that of state-of-the-art algorithms. Physical experiments demonstrate the method's ability to operate in real-time, enabling safe navigation for multi-robot in uncertain environments.
DVRP-MHSI: Dynamic Visualization Research Platform for Multimodal Human-Swarm Interaction
Aug 20, 2024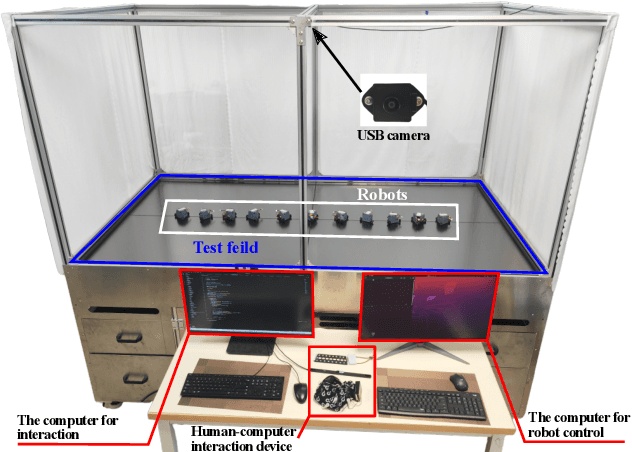
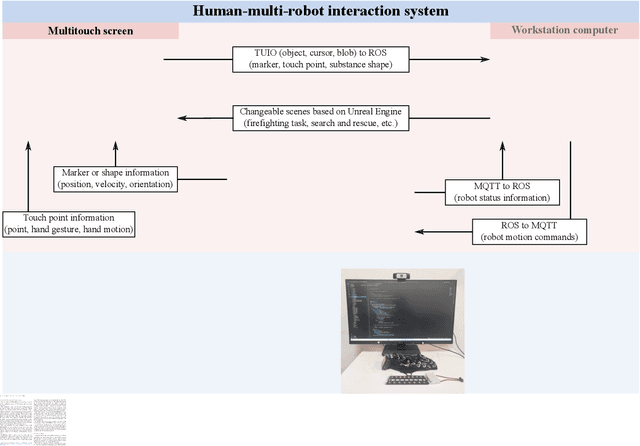
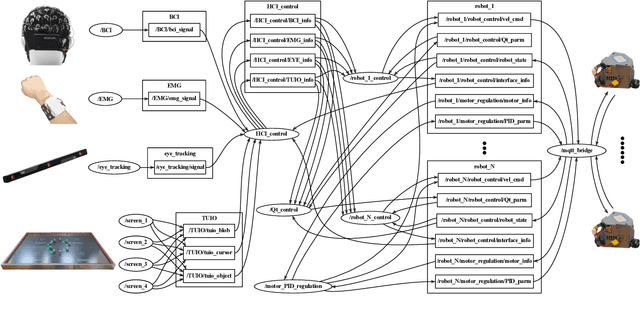
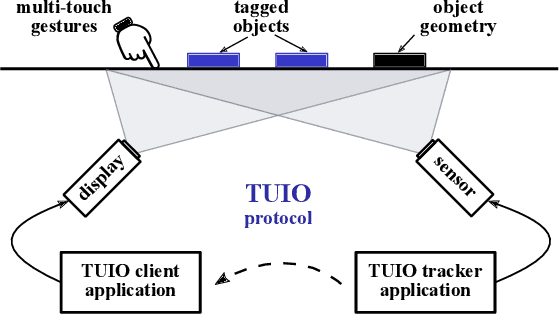
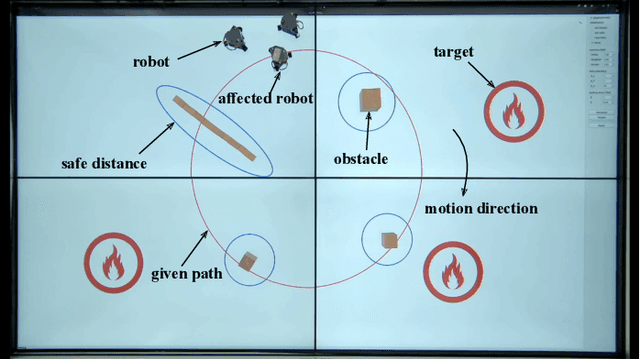
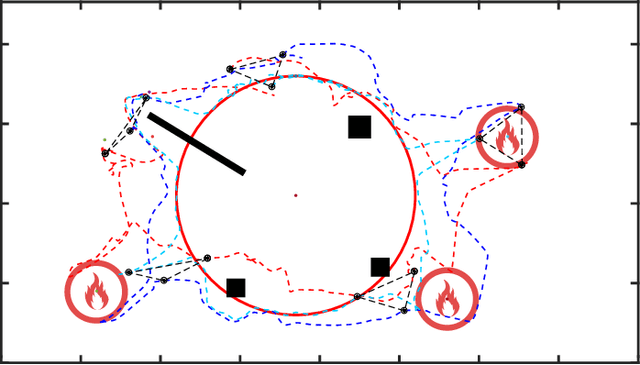
In recent years, there has been a significant amount of research on algorithms and control methods for distributed collaborative robots. However, the emergence of collective behavior in a swarm is still difficult to predict and control. Nevertheless, human interaction with the swarm helps render the swarm more predictable and controllable, as human operators can utilize intuition or knowledge that is not always available to the swarm. Therefore, this paper designs the Dynamic Visualization Research Platform for Multimodal Human-Swarm Interaction (DVRP-MHSI), which is an innovative open system that can perform real-time dynamic visualization and is specifically designed to accommodate a multitude of interaction modalities (such as brain-computer, eye-tracking, electromyographic, and touch-based interfaces), thereby expediting progress in human-swarm interaction research. Specifically, the platform consists of custom-made low-cost omnidirectional wheeled mobile robots, multitouch screens and two workstations. In particular, the mutitouch screens can recognize human gestures and the shapes of objects placed on them, and they can also dynamically render diverse scenes. One of the workstations processes communication information within robots and the other one implements human-robot interaction methods. The development of DVRP-MHSI frees researchers from hardware or software details and allows them to focus on versatile swarm algorithms and human-swarm interaction methods without being limited to fixed scenarios, tasks, and interfaces. The effectiveness and potential of the platform for human-swarm interaction studies are validated by several demonstrative experiments.
Robot Navigation in a Crowd by Integrating Deep Reinforcement Learning and Online Planning
Feb 26, 2021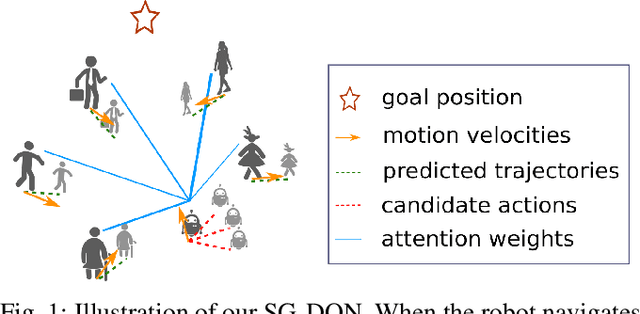
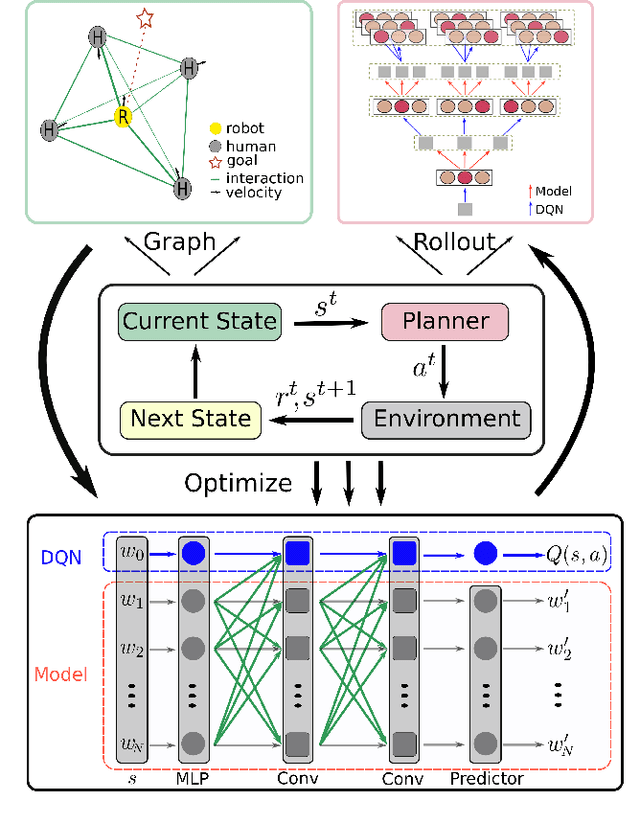
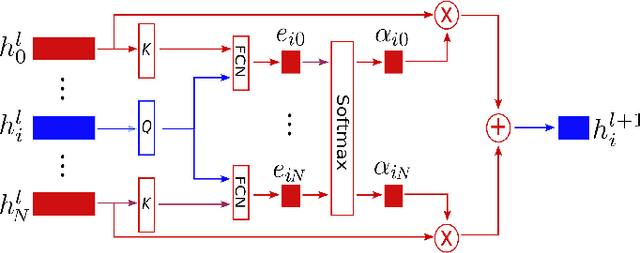
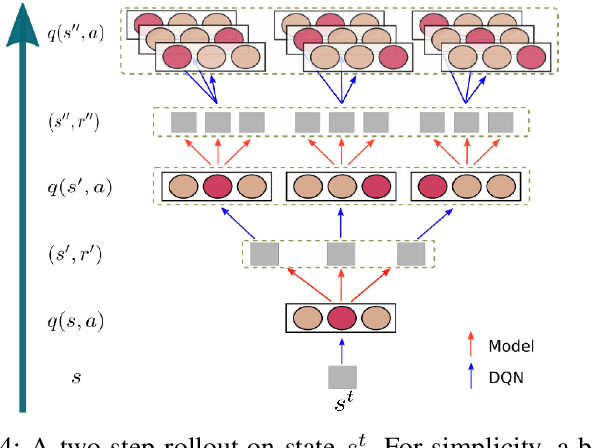
It is still an open and challenging problem for mobile robots navigating along time-efficient and collision-free paths in a crowd. The main challenge comes from the complex and sophisticated interaction mechanism, which requires the robot to understand the crowd and perform proactive and foresighted behaviors. Deep reinforcement learning is a promising solution to this problem. However, most previous learning methods incur a tremendous computational burden. To address these problems, we propose a graph-based deep reinforcement learning method, SG-DQN, that (i) introduces a social attention mechanism to extract an efficient graph representation for the crowd-robot state; (ii) directly evaluates the coarse q-values of the raw state with a learned dueling deep Q network(DQN); and then (iii) refines the coarse q-values via online planning on possible future trajectories. The experimental results indicate that our model can help the robot better understand the crowd and achieve a high success rate of more than 0.99 in the crowd navigation task. Compared against previous state-of-the-art algorithms, our algorithm achieves an equivalent, if not better, performance while requiring less than half of the computational cost.