 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenGo: An OpenClaw-Based Robotic Dog with Real-Time Skill Switching
Apr 02, 2026Adaptation to complex tasks and multiple scenarios remains a significant challenge for a single robot agent. The ability to acquire organize, and switch between a wide range of skills in real time, particularly in dynamic environments, has become a fundamental requirement for embodied intelligence. We introduce OpenGo, an OpenClaw-powered embodied robotic dog capable of switching skills in real time according to the scene and task instructions. Specifically, the agent is equipped with (1) a customizable skill library with easy skill import and autonomous skill validation, (2) a dispatcher that selects and invokes different skills according to task prompts or language instructions, and (3) a self-learning framework that fine-tunes skills based on task completion and human feedback. We deploy the agent in Unitree's Go2 robotic dog and validate its capabilities in self-checking and switching of skills autonomously. In addition, by integrating Feishu-platform communication, we enable natural-language guidance and human feedback, allowing inexperienced users to control the robotic dog through simple instructions.
GeoLoco: Leveraging 3D Geometric Priors from Visual Foundation Model for Robust RGB-Only Humanoid Locomotion
Mar 08, 2026The prevailing paradigm of perceptive humanoid locomotion relies heavily on active depth sensors. However, this depth-centric approach fundamentally discards the rich semantic and dense appearance cues of the visual world, severing low-level control from the high-level reasoning essential for general embodied intelligence. While monocular RGB offers a ubiquitous, information-dense alternative, end-to-end reinforcement learning from raw 2D pixels suffers from extreme sample inefficiency and catastrophic sim-to-real collapse due to the inherent loss of geometric scale. To break this deadlock, we propose GeoLoco, a purely RGB-driven locomotion framework that conceptualizes monocular images as high-dimensional 3D latent representations by harnessing the powerful geometric priors of a frozen, scale-aware Visual Foundation Model (VFM). Rather than naive feature concatenation, we design a proprioceptive-query multi-head cross-attention mechanism that dynamically attends to task-critical topological features conditioned on the robot's real-time gait phase. Crucially, to prevent the policy from overfitting to superficial textures, we introduce a dual-head auxiliary learning scheme. This explicit regularization forces the high-dimensional latent space to strictly align with the physical terrain geometry, ensuring robust zero-shot sim-to-real transfer. Trained exclusively in simulation, GeoLoco achieves robust zero-shot transfer to the Unitree G1 humanoid and successfully negotiates challenging terrains.
Dual-Arm Hierarchical Planning for Laboratory Automation: Vibratory Sieve Shaker Operations
Sep 18, 2025
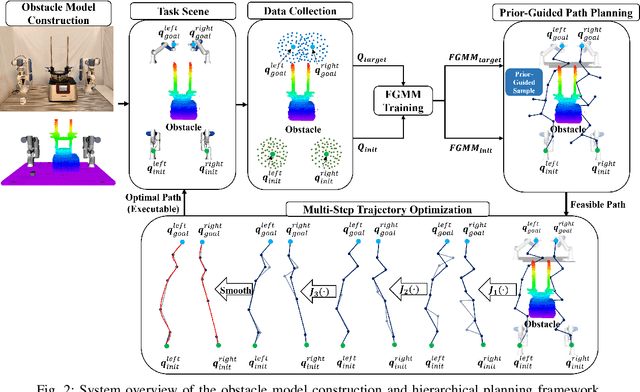
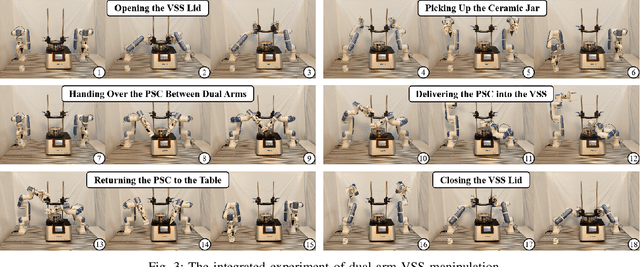
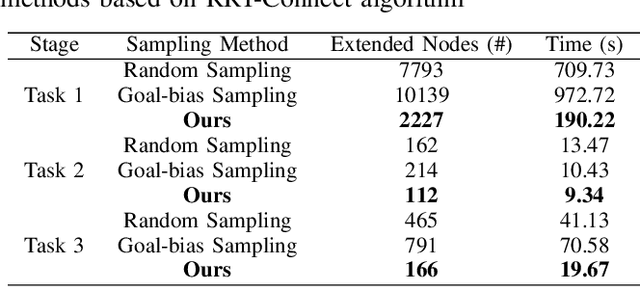
This paper addresses the challenges of automating vibratory sieve shaker operations in a materials laboratory, focusing on three critical tasks: 1) dual-arm lid manipulation in 3 cm clearance spaces, 2) bimanual handover in overlapping workspaces, and 3) obstructed powder sample container delivery with orientation constraints. These tasks present significant challenges, including inefficient sampling in narrow passages, the need for smooth trajectories to prevent spillage, and suboptimal paths generated by conventional methods. To overcome these challenges, we propose a hierarchical planning framework combining Prior-Guided Path Planning and Multi-Step Trajectory Optimization. The former uses a finite Gaussian mixture model to improve sampling efficiency in narrow passages, while the latter refines paths by shortening, simplifying, imposing joint constraints, and B-spline smoothing. Experimental results demonstrate the framework's effectiveness: planning time is reduced by up to 80.4%, and waypoints are decreased by 89.4%. Furthermore, the system completes the full vibratory sieve shaker operation workflow in a physical experiment, validating its practical applicability for complex laboratory automation.
Grasp Like Humans: Learning Generalizable Multi-Fingered Grasping from Human Proprioceptive Sensorimotor Integration
Sep 10, 2025

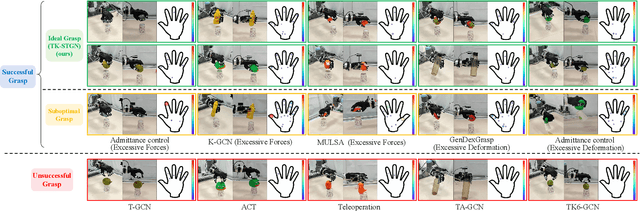

Tactile and kinesthetic perceptions are crucial for human dexterous manipulation, enabling reliable grasping of objects via proprioceptive sensorimotor integration. For robotic hands, even though acquiring such tactile and kinesthetic feedback is feasible, establishing a direct mapping from this sensory feedback to motor actions remains challenging. In this paper, we propose a novel glove-mediated tactile-kinematic perception-prediction framework for grasp skill transfer from human intuitive and natural operation to robotic execution based on imitation learning, and its effectiveness is validated through generalized grasping tasks, including those involving deformable objects. Firstly, we integrate a data glove to capture tactile and kinesthetic data at the joint level. The glove is adaptable for both human and robotic hands, allowing data collection from natural human hand demonstrations across different scenarios. It ensures consistency in the raw data format, enabling evaluation of grasping for both human and robotic hands. Secondly, we establish a unified representation of multi-modal inputs based on graph structures with polar coordinates. We explicitly integrate the morphological differences into the designed representation, enhancing the compatibility across different demonstrators and robotic hands. Furthermore, we introduce the Tactile-Kinesthetic Spatio-Temporal Graph Networks (TK-STGN), which leverage multidimensional subgraph convolutions and attention-based LSTM layers to extract spatio-temporal features from graph inputs to predict node-based states for each hand joint. These predictions are then mapped to final commands through a force-position hybrid mapping.
RESAR-BEV: An Explainable Progressive Residual Autoregressive Approach for Camera-Radar Fusion in BEV Segmentation
May 10, 2025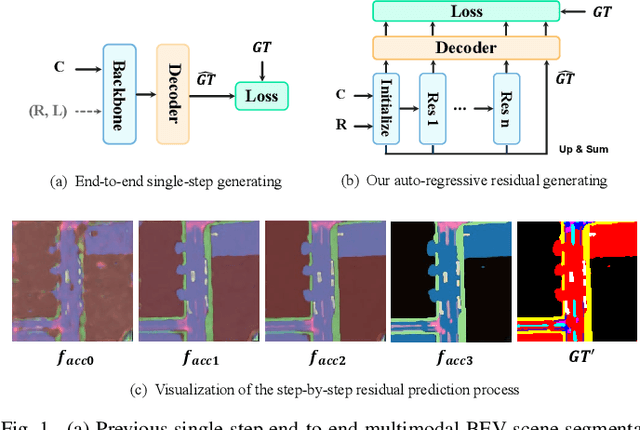
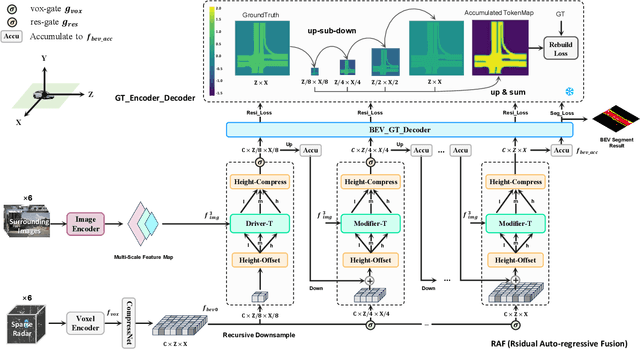
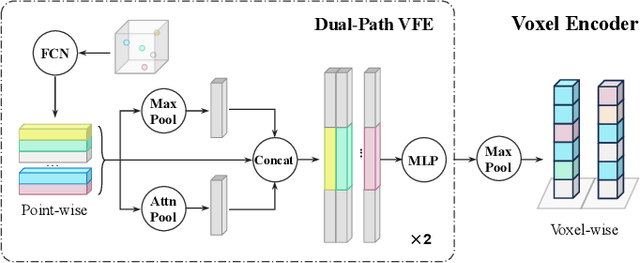
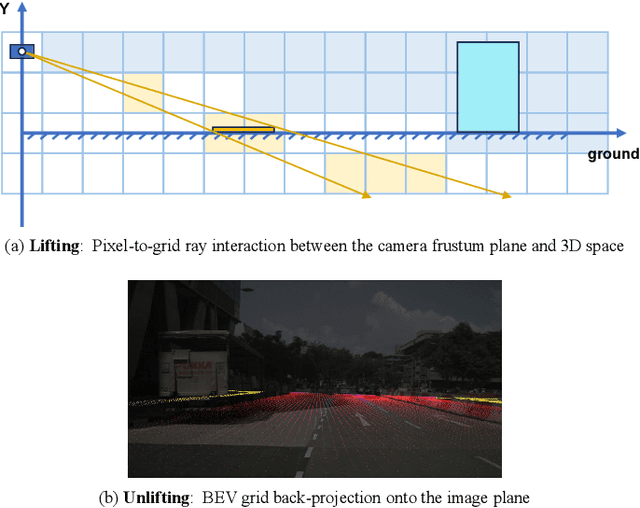
Bird's-Eye-View (BEV) semantic segmentation provides comprehensive environmental perception for autonomous driving but suffers multi-modal misalignment and sensor noise. We propose RESAR-BEV, a progressive refinement framework that advances beyond single-step end-to-end approaches: (1) progressive refinement through residual autoregressive learning that decomposes BEV segmentation into interpretable coarse-to-fine stages via our Drive-Transformer and Modifier-Transformer residual prediction cascaded architecture, (2) robust BEV representation combining ground-proximity voxels with adaptive height offsets and dual-path voxel feature encoding (max+attention pooling) for efficient feature extraction, and (3) decoupled supervision with offline Ground Truth decomposition and online joint optimization to prevent overfitting while ensuring structural coherence. Experiments on nuScenes demonstrate RESAR-BEV achieves state-of-the-art performance with 54.0% mIoU across 7 essential driving-scene categories while maintaining real-time capability at 14.6 FPS. The framework exhibits robustness in challenging scenarios of long-range perception and adverse weather conditions.
LuSeg: Efficient Negative and Positive Obstacles Segmentation via Contrast-Driven Multi-Modal Feature Fusion on the Lunar
Mar 14, 2025



As lunar exploration missions grow increasingly complex, ensuring safe and autonomous rover-based surface exploration has become one of the key challenges in lunar exploration tasks. In this work, we have developed a lunar surface simulation system called the Lunar Exploration Simulator System (LESS) and the LunarSeg dataset, which provides RGB-D data for lunar obstacle segmentation that includes both positive and negative obstacles. Additionally, we propose a novel two-stage segmentation network called LuSeg. Through contrastive learning, it enforces semantic consistency between the RGB encoder from Stage I and the depth encoder from Stage II. Experimental results on our proposed LunarSeg dataset and additional public real-world NPO road obstacle dataset demonstrate that LuSeg achieves state-of-the-art segmentation performance for both positive and negative obstacles while maintaining a high inference speed of approximately 57\,Hz. We have released the implementation of our LESS system, LunarSeg dataset, and the code of LuSeg at:https://github.com/nubot-nudt/LuSeg.
HI-GVF: Shared Control based on Human-Influenced Guiding Vector Fields for Human-multi-robot Cooperation
Feb 17, 2025
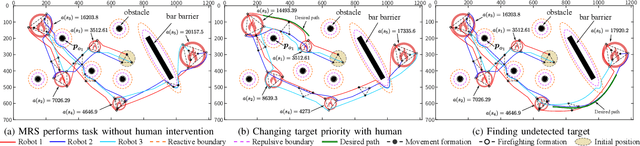
Human-multi-robot shared control leverages human decision-making and robotic autonomy to enhance human-robot collaboration. While widely studied, existing systems often adopt a leader-follower model, limiting robot autonomy to some extent. Besides, a human is required to directly participate in the motion control of robots through teleoperation, which significantly burdens the operator. To alleviate these two issues, we propose a layered shared control computing framework using human-influenced guiding vector fields (HI-GVF) for human-robot collaboration. HI-GVF guides the multi-robot system along a desired path specified by the human. Then, an intention field is designed to merge the human and robot intentions, accelerating the propagation of the human intention within the multi-robot system. Moreover, we give the stability analysis of the proposed model and use collision avoidance based on safety barrier certificates to fine-tune the velocity. Eventually, considering the firefighting task as an example scenario, we conduct simulations and experiments using multiple human-robot interfaces (brain-computer interface, myoelectric wristband, eye-tracking), and the results demonstrate that our proposed approach boosts the effectiveness and performance of the task.
Consensus-Based Dynamic Task Allocation for Multi-Robot System Considering Payloads Consumption
Dec 13, 2024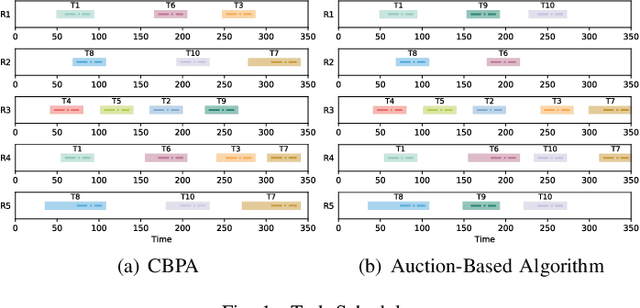
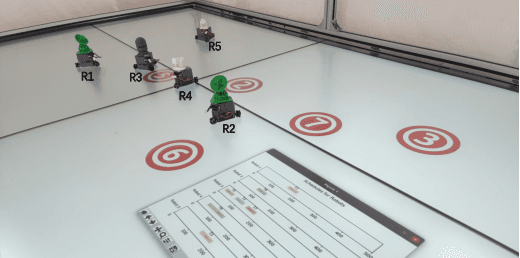
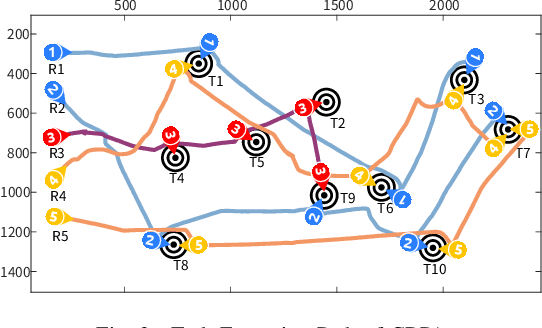
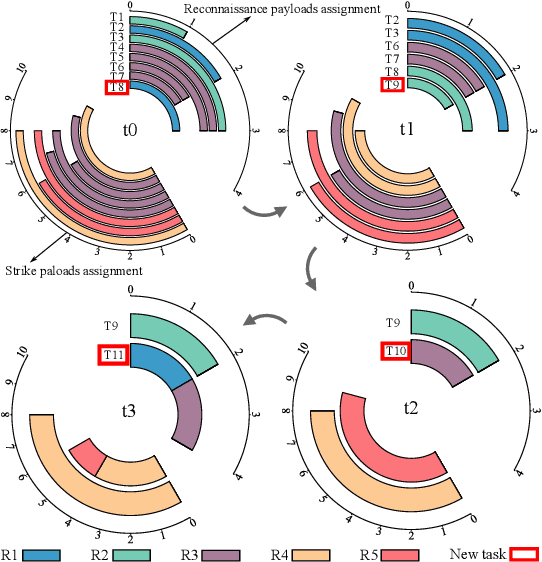
This paper presents a consensus-based payload algorithm (CBPA) to deal with the condition of robots' capability decrease for multi-robot task allocation. During the execution of complex tasks, robots' capabilities could decrease with the consumption of payloads, which causes a problem that the robot coalition would not meet the tasks' requirements in real time. The proposed CBPA is an enhanced version of the consensus-based bundle algorithm (CBBA) and comprises two primary core phases: the payload bundle construction and consensus phases. In the payload bundle construction phase, CBPA introduces a payload assignment matrix to track the payloads carried by the robots and the demands of multi-robot tasks in real time. Then, robots share their respective payload assignment matrix in the consensus phase. These two phases are iterated to dynamically adjust the number of robots performing multi-robot tasks and the number of tasks each robot performs and obtain conflict-free results to ensure that the robot coalition meets the demand and completes all tasks as quickly as possible. Physical experiment shows that CBPA is appropriate in complex and dynamic scenarios where robots need to collaborate and task requirements are tightly coupled to the robots' payloads. Numerical experiments show that CBPA has higher total task gains than CBBA.
SPF-EMPC Planner: A real-time multi-robot trajectory planner for complex environments with uncertainties
Oct 17, 2024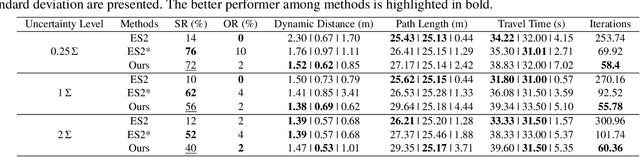
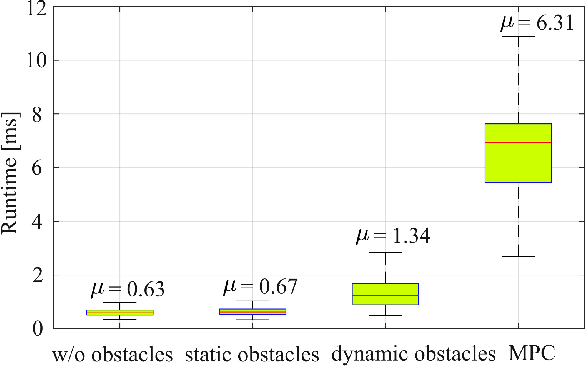
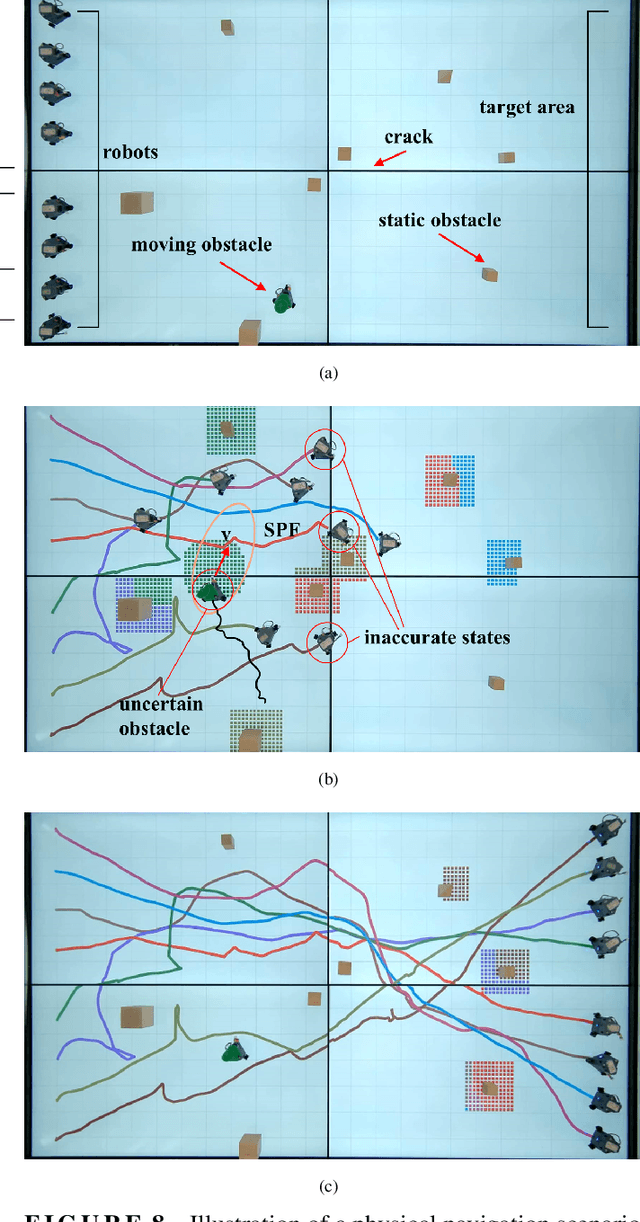
In practical applications, the unpredictable movement of obstacles and the imprecise state observation of robots introduce significant uncertainties for the swarm of robots, especially in cluster environments. However, existing methods are difficult to realize safe navigation, considering uncertainties, complex environmental structures, and robot swarms. This paper introduces an extended state model predictive control planner with a safe probability field to address the multi-robot navigation problem in complex, dynamic, and uncertain environments. Initially, the safe probability field offers an innovative approach to model the uncertainty of external dynamic obstacles, combining it with an unconstrained optimization method to generate safe trajectories for multi-robot online. Subsequently, the extended state model predictive controller can accurately track these generated trajectories while considering the robots' inherent model constraints and state uncertainty, thus ensuring the practical feasibility of the planned trajectories. Simulation experiments show a success rate four times higher than that of state-of-the-art algorithms. Physical experiments demonstrate the method's ability to operate in real-time, enabling safe navigation for multi-robot in uncertain environments.
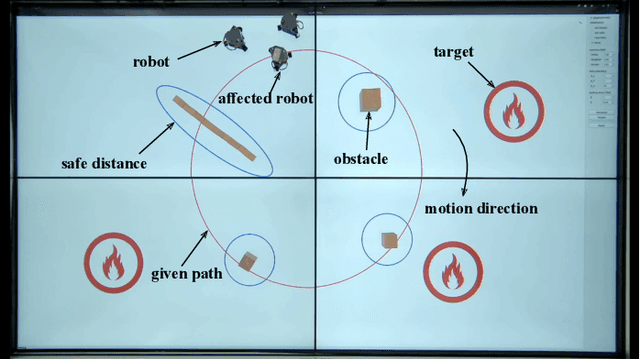
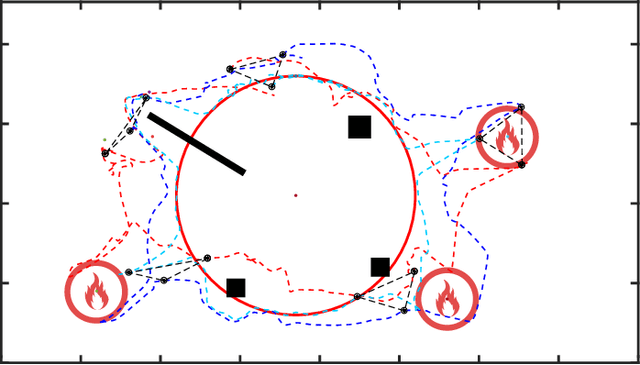
DVRP-MHSI: Dynamic Visualization Research Platform for Multimodal Human-Swarm Interaction
Aug 20, 2024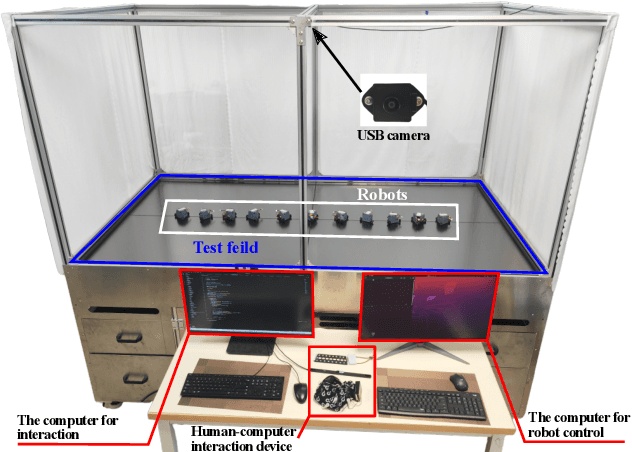
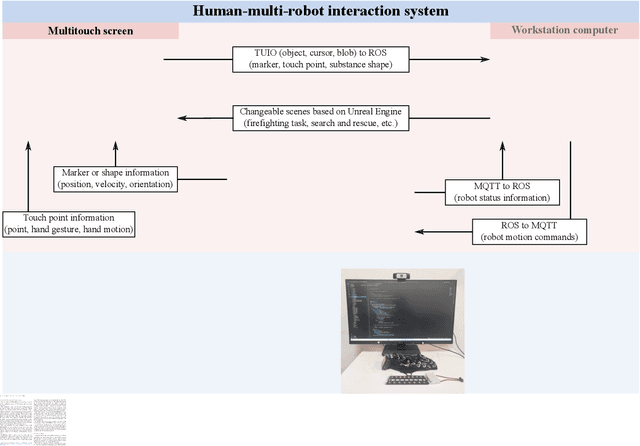
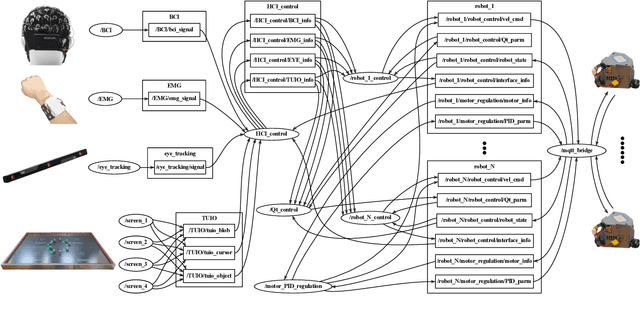
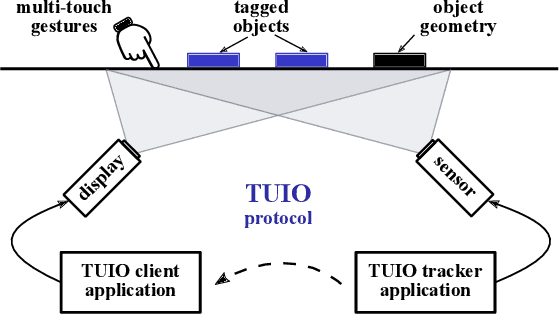
In recent years, there has been a significant amount of research on algorithms and control methods for distributed collaborative robots. However, the emergence of collective behavior in a swarm is still difficult to predict and control. Nevertheless, human interaction with the swarm helps render the swarm more predictable and controllable, as human operators can utilize intuition or knowledge that is not always available to the swarm. Therefore, this paper designs the Dynamic Visualization Research Platform for Multimodal Human-Swarm Interaction (DVRP-MHSI), which is an innovative open system that can perform real-time dynamic visualization and is specifically designed to accommodate a multitude of interaction modalities (such as brain-computer, eye-tracking, electromyographic, and touch-based interfaces), thereby expediting progress in human-swarm interaction research. Specifically, the platform consists of custom-made low-cost omnidirectional wheeled mobile robots, multitouch screens and two workstations. In particular, the mutitouch screens can recognize human gestures and the shapes of objects placed on them, and they can also dynamically render diverse scenes. One of the workstations processes communication information within robots and the other one implements human-robot interaction methods. The development of DVRP-MHSI frees researchers from hardware or software details and allows them to focus on versatile swarm algorithms and human-swarm interaction methods without being limited to fixed scenarios, tasks, and interfaces. The effectiveness and potential of the platform for human-swarm interaction studies are validated by several demonstrative experiments.