 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsensus-Based Dynamic Task Allocation for Multi-Robot System Considering Payloads Consumption
Dec 13, 2024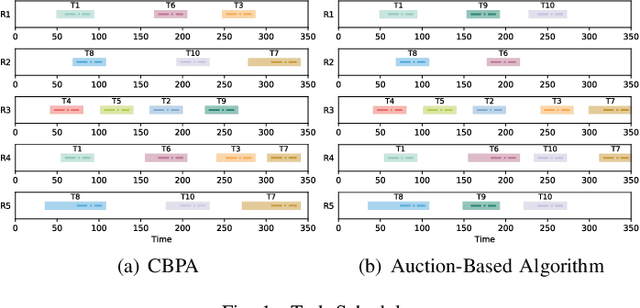
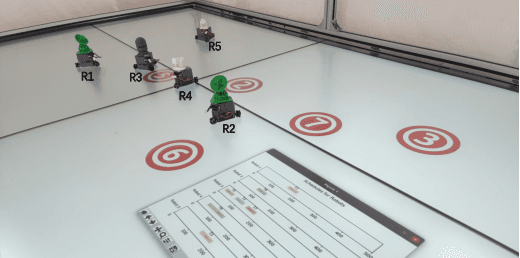
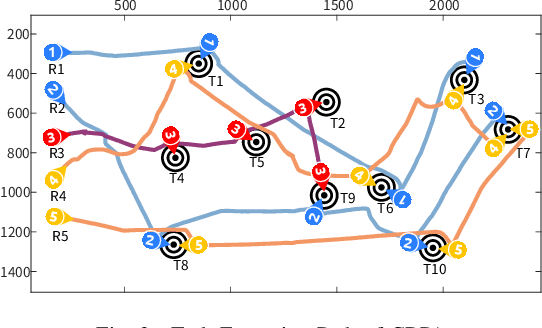
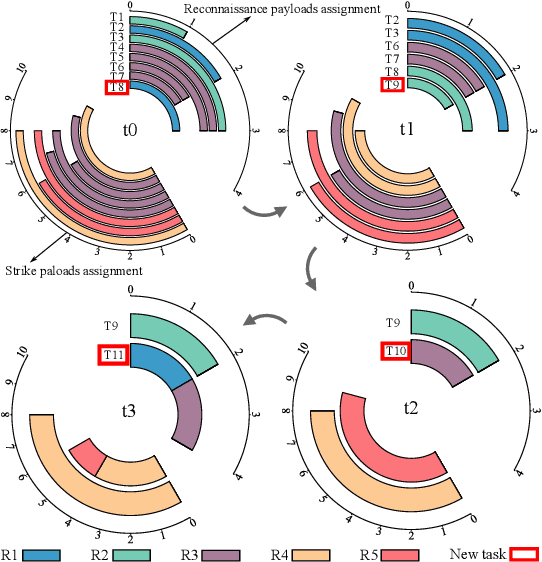
This paper presents a consensus-based payload algorithm (CBPA) to deal with the condition of robots' capability decrease for multi-robot task allocation. During the execution of complex tasks, robots' capabilities could decrease with the consumption of payloads, which causes a problem that the robot coalition would not meet the tasks' requirements in real time. The proposed CBPA is an enhanced version of the consensus-based bundle algorithm (CBBA) and comprises two primary core phases: the payload bundle construction and consensus phases. In the payload bundle construction phase, CBPA introduces a payload assignment matrix to track the payloads carried by the robots and the demands of multi-robot tasks in real time. Then, robots share their respective payload assignment matrix in the consensus phase. These two phases are iterated to dynamically adjust the number of robots performing multi-robot tasks and the number of tasks each robot performs and obtain conflict-free results to ensure that the robot coalition meets the demand and completes all tasks as quickly as possible. Physical experiment shows that CBPA is appropriate in complex and dynamic scenarios where robots need to collaborate and task requirements are tightly coupled to the robots' payloads. Numerical experiments show that CBPA has higher total task gains than CBBA.
SPF-EMPC Planner: A real-time multi-robot trajectory planner for complex environments with uncertainties
Oct 17, 2024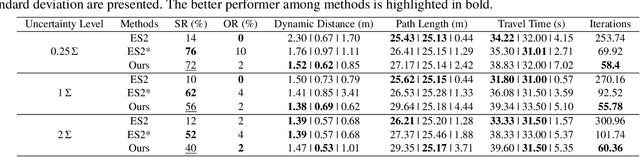
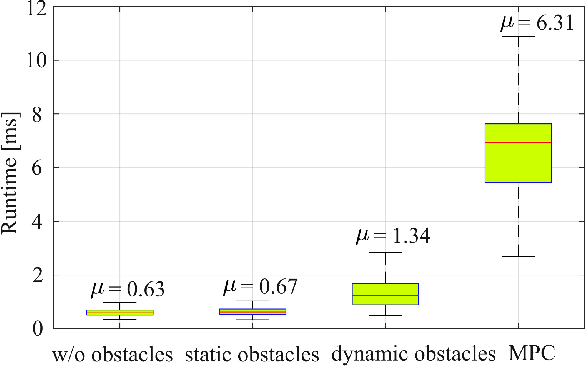
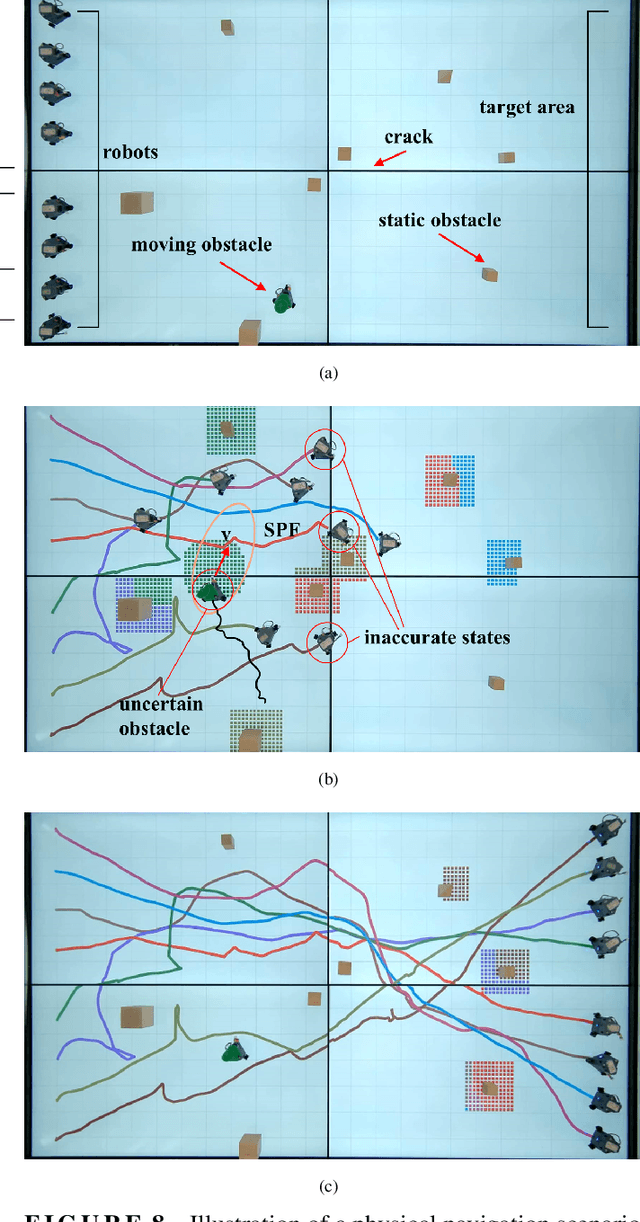
In practical applications, the unpredictable movement of obstacles and the imprecise state observation of robots introduce significant uncertainties for the swarm of robots, especially in cluster environments. However, existing methods are difficult to realize safe navigation, considering uncertainties, complex environmental structures, and robot swarms. This paper introduces an extended state model predictive control planner with a safe probability field to address the multi-robot navigation problem in complex, dynamic, and uncertain environments. Initially, the safe probability field offers an innovative approach to model the uncertainty of external dynamic obstacles, combining it with an unconstrained optimization method to generate safe trajectories for multi-robot online. Subsequently, the extended state model predictive controller can accurately track these generated trajectories while considering the robots' inherent model constraints and state uncertainty, thus ensuring the practical feasibility of the planned trajectories. Simulation experiments show a success rate four times higher than that of state-of-the-art algorithms. Physical experiments demonstrate the method's ability to operate in real-time, enabling safe navigation for multi-robot in uncertain environments.