 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNot Just What's There: Enabling CLIP to Comprehend Negated Visual Descriptions Without Fine-tuning
Feb 24, 2026Vision-Language Models (VLMs) like CLIP struggle to understand negation, often embedding affirmatives and negatives similarly (e.g., matching "no dog" with dog images). Existing methods refine negation understanding via fine-tuning CLIP's text encoder, risking overfitting. In this work, we propose CLIPGlasses, a plug-and-play framework that enhances CLIP's ability to comprehend negated visual descriptions. CLIPGlasses adopts a dual-stage design: a Lens module disentangles negated semantics from text embeddings, and a Frame module predicts context-aware repulsion strength, which is integrated into a modified similarity computation to penalize alignment with negated semantics, thereby reducing false positive matches. Experiments show that CLIP equipped with CLIPGlasses achieves competitive in-domain performance and outperforms state-of-the-art methods in cross-domain generalization. Its superiority is especially evident under low-resource conditions, indicating stronger robustness across domains.
I2E: From Image Pixels to Actionable Interactive Environments for Text-Guided Image Editing
Jan 07, 2026Existing text-guided image editing methods primarily rely on end-to-end pixel-level inpainting paradigm. Despite its success in simple scenarios, this paradigm still significantly struggles with compositional editing tasks that require precise local control and complex multi-object spatial reasoning. This paradigm is severely limited by 1) the implicit coupling of planning and execution, 2) the lack of object-level control granularity, and 3) the reliance on unstructured, pixel-centric modeling. To address these limitations, we propose I2E, a novel "Decompose-then-Action" paradigm that revisits image editing as an actionable interaction process within a structured environment. I2E utilizes a Decomposer to transform unstructured images into discrete, manipulable object layers and then introduces a physics-aware Vision-Language-Action Agent to parse complex instructions into a series of atomic actions via Chain-of-Thought reasoning. Further, we also construct I2E-Bench, a benchmark designed for multi-instance spatial reasoning and high-precision editing. Experimental results on I2E-Bench and multiple public benchmarks demonstrate that I2E significantly outperforms state-of-the-art methods in handling complex compositional instructions, maintaining physical plausibility, and ensuring multi-turn editing stability.
SurfAAV: Design and Implementation of a Novel Multimodal Surfing Aquatic-Aerial Vehicle
Jun 18, 2025



Despite significant advancements in the research of aquatic-aerial robots, existing configurations struggle to efficiently perform underwater, surface, and aerial movement simultaneously. In this paper, we propose a novel multimodal surfing aquatic-aerial vehicle, SurfAAV, which efficiently integrates underwater navigation, surface gliding, and aerial flying capabilities. Thanks to the design of the novel differential thrust vectoring hydrofoil, SurfAAV can achieve efficient surface gliding and underwater navigation without the need for a buoyancy adjustment system. This design provides flexible operational capabilities for both surface and underwater tasks, enabling the robot to quickly carry out underwater monitoring activities. Additionally, when it is necessary to reach another water body, SurfAAV can switch to aerial mode through a gliding takeoff, flying to the target water area to perform corresponding tasks. The main contribution of this letter lies in proposing a new solution for underwater, surface, and aerial movement, designing a novel hybrid prototype concept, developing the required control laws, and validating the robot's ability to successfully perform surface gliding and gliding takeoff. SurfAAV achieves a maximum surface gliding speed of 7.96 m/s and a maximum underwater speed of 3.1 m/s. The prototype's surface gliding maneuverability and underwater cruising maneuverability both exceed those of existing aquatic-aerial vehicles.
Efficient Multimodal 3D Object Detector via Instance-Level Contrastive Distillation
Mar 17, 2025Multimodal 3D object detectors leverage the strengths of both geometry-aware LiDAR point clouds and semantically rich RGB images to enhance detection performance. However, the inherent heterogeneity between these modalities, including unbalanced convergence and modal misalignment, poses significant challenges. Meanwhile, the large size of the detection-oriented feature also constrains existing fusion strategies to capture long-range dependencies for the 3D detection tasks. In this work, we introduce a fast yet effective multimodal 3D object detector, incorporating our proposed Instance-level Contrastive Distillation (ICD) framework and Cross Linear Attention Fusion Module (CLFM). ICD aligns instance-level image features with LiDAR representations through object-aware contrastive distillation, ensuring fine-grained cross-modal consistency. Meanwhile, CLFM presents an efficient and scalable fusion strategy that enhances cross-modal global interactions within sizable multimodal BEV features. Extensive experiments on the KITTI and nuScenes 3D object detection benchmarks demonstrate the effectiveness of our methods. Notably, our 3D object detector outperforms state-of-the-art (SOTA) methods while achieving superior efficiency. The implementation of our method has been released as open-source at: https://github.com/nubot-nudt/ICD-Fusion.
A Novel Decomposed Feature-Oriented Framework for Open-Set Semantic Segmentation on LiDAR Data
Mar 14, 2025



Semantic segmentation is a key technique that enables mobile robots to understand and navigate surrounding environments autonomously. However, most existing works focus on segmenting known objects, overlooking the identification of unknown classes, which is common in real-world applications. In this paper, we propose a feature-oriented framework for open-set semantic segmentation on LiDAR data, capable of identifying unknown objects while retaining the ability to classify known ones. We design a decomposed dual-decoder network to simultaneously perform closed-set semantic segmentation and generate distinctive features for unknown objects. The network is trained with multi-objective loss functions to capture the characteristics of known and unknown objects. Using the extracted features, we introduce an anomaly detection mechanism to identify unknown objects. By integrating the results of close-set semantic segmentation and anomaly detection, we achieve effective feature-driven LiDAR open-set semantic segmentation. Evaluations on both SemanticKITTI and nuScenes datasets demonstrate that our proposed framework significantly outperforms state-of-the-art methods. The source code will be made publicly available at https://github.com/nubot-nudt/DOSS.
Fast and Accurate Deep Loop Closing and Relocalization for Reliable LiDAR SLAM
Sep 15, 2023Loop closing and relocalization are crucial techniques to establish reliable and robust long-term SLAM by addressing pose estimation drift and degeneration. This article begins by formulating loop closing and relocalization within a unified framework. Then, we propose a novel multi-head network LCR-Net to tackle both tasks effectively. It exploits novel feature extraction and pose-aware attention mechanism to precisely estimate similarities and 6-DoF poses between pairs of LiDAR scans. In the end, we integrate our LCR-Net into a SLAM system and achieve robust and accurate online LiDAR SLAM in outdoor driving environments. We thoroughly evaluate our LCR-Net through three setups derived from loop closing and relocalization, including candidate retrieval, closed-loop point cloud registration, and continuous relocalization using multiple datasets. The results demonstrate that LCR-Net excels in all three tasks, surpassing the state-of-the-art methods and exhibiting a remarkable generalization ability. Notably, our LCR-Net outperforms baseline methods without using a time-consuming robust pose estimator, rendering it suitable for online SLAM applications. To our best knowledge, the integration of LCR-Net yields the first LiDAR SLAM with the capability of deep loop closing and relocalization. The implementation of our methods will be made open-source.
RDMNet: Reliable Dense Matching Based Point Cloud Registration for Autonomous Driving
Mar 31, 2023



Point cloud registration is an important task in robotics and autonomous driving to estimate the ego-motion of the vehicle. Recent advances following the coarse-to-fine manner show promising potential in point cloud registration. However, existing methods rely on good superpoint correspondences, which are hard to be obtained reliably and efficiently, thus resulting in less robust and accurate point cloud registration. In this paper, we propose a novel network, named RDMNet, to find dense point correspondences coarse-to-fine and improve final pose estimation based on such reliable correspondences. Our RDMNet uses a devised 3D-RoFormer mechanism to first extract distinctive superpoints and generates reliable superpoints matches between two point clouds. The proposed 3D-RoFormer fuses 3D position information into the transformer network, efficiently exploiting point clouds' contextual and geometric information to generate robust superpoint correspondences. RDMNet then propagates the sparse superpoints matches to dense point matches using the neighborhood information for accurate point cloud registration. We extensively evaluate our method on multiple datasets from different environments. The experimental results demonstrate that our method outperforms existing state-of-the-art approaches in all tested datasets with a strong generalization ability.
Hybrid Map-Based Path Planning for Robot Navigation in Unstructured Environments
Mar 09, 2023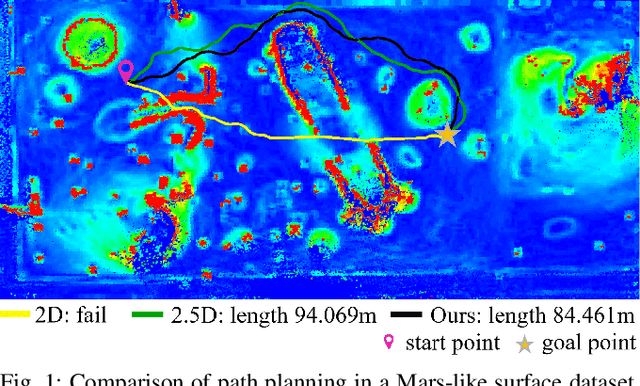
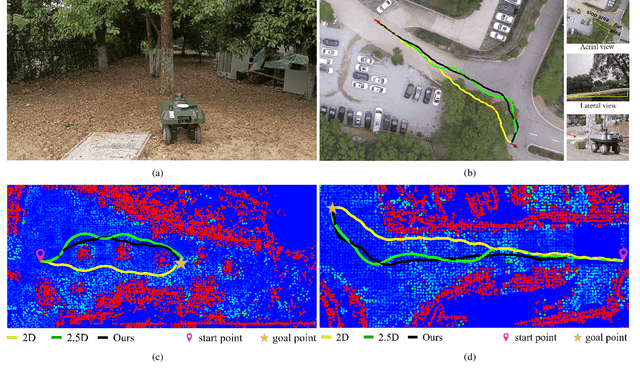
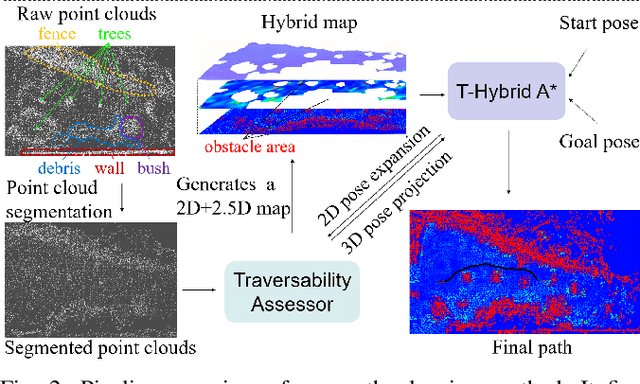
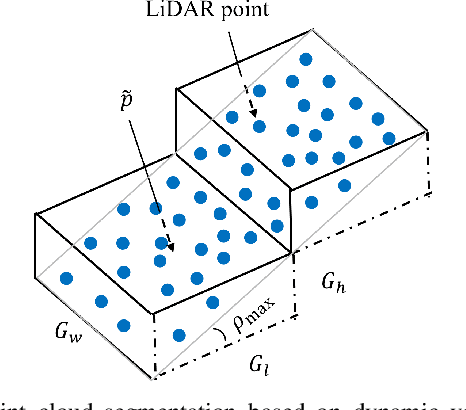
Fast and accurate path planning is important for ground robots to achieve safe and efficient autonomous navigation in unstructured outdoor environments. However, most existing methods exploiting either 2D or 2.5D maps struggle to balance the efficiency and safety for ground robots navigating in such challenging scenarios. In this paper, we propose a novel hybrid map representation by fusing a 2D grid and a 2.5D digital elevation map. Based on it, a novel path planning method is proposed, which considers the robot poses during traversability estimation. By doing so, our method explicitly takes safety as a planning constraint enabling robots to navigate unstructured environments smoothly.The proposed approach has been evaluated on both simulated datasets and a real robot platform. The experimental results demonstrate the efficiency and effectiveness of the proposed method. Compared to state-of-the-art baseline methods, the proposed approach consistently generates safer and easier paths for the robot in different unstructured outdoor environments. The implementation of our method is publicly available at https://github.com/nubot-nudt/T-Hybrid-planner.
Robot Navigation in a Crowd by Integrating Deep Reinforcement Learning and Online Planning
Feb 26, 2021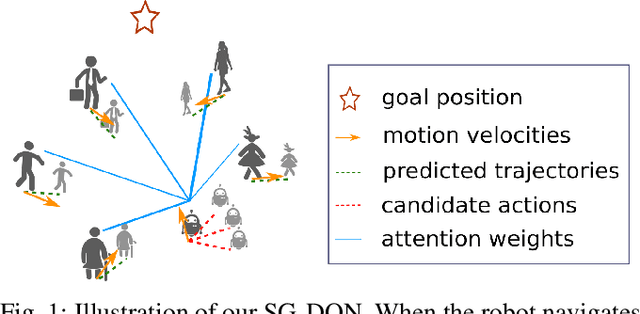
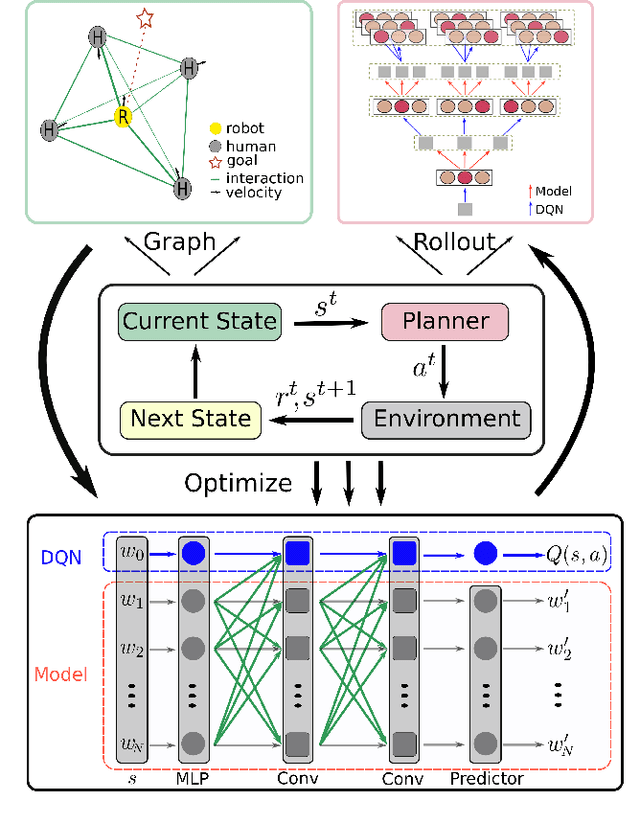
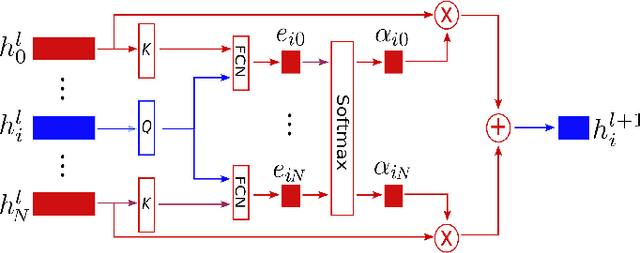
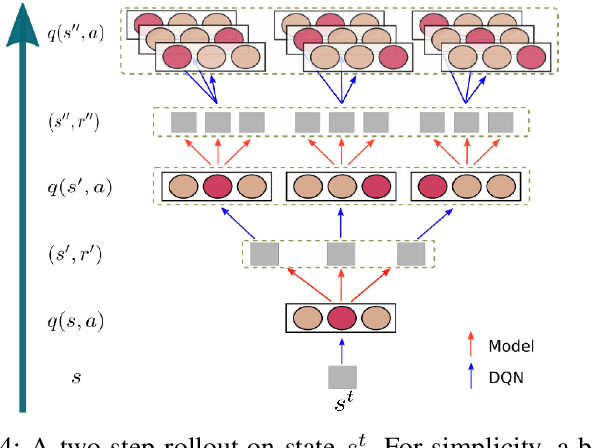
It is still an open and challenging problem for mobile robots navigating along time-efficient and collision-free paths in a crowd. The main challenge comes from the complex and sophisticated interaction mechanism, which requires the robot to understand the crowd and perform proactive and foresighted behaviors. Deep reinforcement learning is a promising solution to this problem. However, most previous learning methods incur a tremendous computational burden. To address these problems, we propose a graph-based deep reinforcement learning method, SG-DQN, that (i) introduces a social attention mechanism to extract an efficient graph representation for the crowd-robot state; (ii) directly evaluates the coarse q-values of the raw state with a learned dueling deep Q network(DQN); and then (iii) refines the coarse q-values via online planning on possible future trajectories. The experimental results indicate that our model can help the robot better understand the crowd and achieve a high success rate of more than 0.99 in the crowd navigation task. Compared against previous state-of-the-art algorithms, our algorithm achieves an equivalent, if not better, performance while requiring less than half of the computational cost.
Distributed Circumnavigation Control with Dynamic Spacings for a Heterogeneous Multi-robot System
May 16, 2018

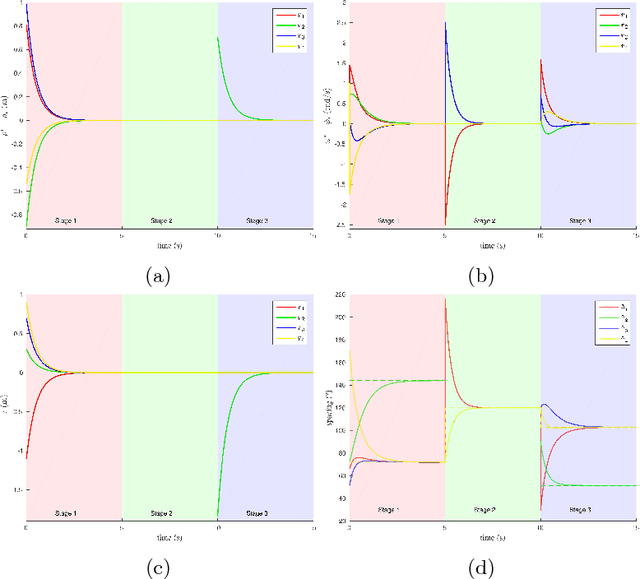
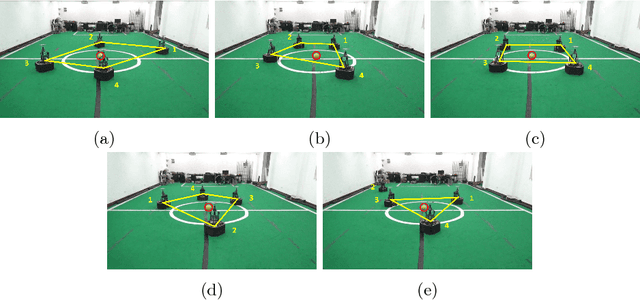
Circumnavigation control is useful in real-world applications such as entrapping a hostile target. In this paper, we consider a heterogeneous multi-robot system where robots have different physical properties, such as maximum movement speeds. Instead of equal-spacings, dynamic spacings according to robots' properties, which are termed utilities in this paper, will be more desirable in a scenario such as target entrapment. A distributed circumnavigation control algorithm based on utilities is proposed for any number of mobile robots from random 3D positions to circumnavigate a target. The dynamic spacings are subject to the variation of robots' utilities. The robots can only obtain the angular positions and utilities of their two neighbouring robots, so the control law is distributed. Theoretical analysis and experimental results are provided to prove the stability and effectiveness of the proposed control algorithm.