 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Circumnavigation Control with Dynamic Spacings for a Heterogeneous Multi-robot System
Paper and Code
May 16, 2018

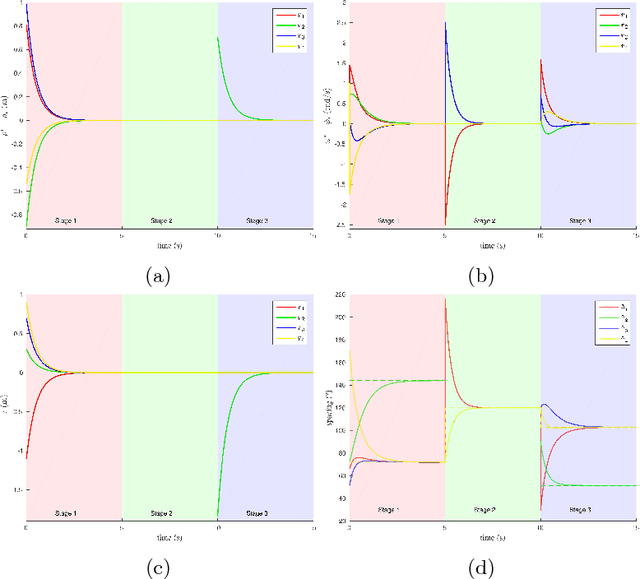
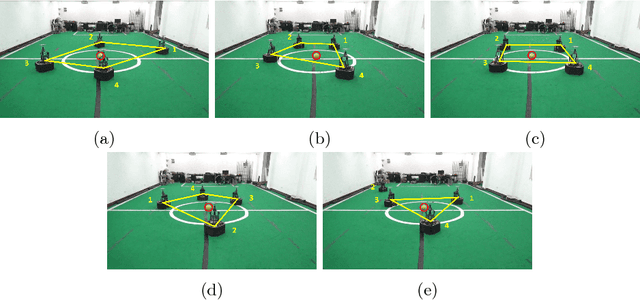
Circumnavigation control is useful in real-world applications such as entrapping a hostile target. In this paper, we consider a heterogeneous multi-robot system where robots have different physical properties, such as maximum movement speeds. Instead of equal-spacings, dynamic spacings according to robots' properties, which are termed utilities in this paper, will be more desirable in a scenario such as target entrapment. A distributed circumnavigation control algorithm based on utilities is proposed for any number of mobile robots from random 3D positions to circumnavigate a target. The dynamic spacings are subject to the variation of robots' utilities. The robots can only obtain the angular positions and utilities of their two neighbouring robots, so the control law is distributed. Theoretical analysis and experimental results are provided to prove the stability and effectiveness of the proposed control algorithm.