 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeoLoco: Leveraging 3D Geometric Priors from Visual Foundation Model for Robust RGB-Only Humanoid Locomotion
Mar 08, 2026The prevailing paradigm of perceptive humanoid locomotion relies heavily on active depth sensors. However, this depth-centric approach fundamentally discards the rich semantic and dense appearance cues of the visual world, severing low-level control from the high-level reasoning essential for general embodied intelligence. While monocular RGB offers a ubiquitous, information-dense alternative, end-to-end reinforcement learning from raw 2D pixels suffers from extreme sample inefficiency and catastrophic sim-to-real collapse due to the inherent loss of geometric scale. To break this deadlock, we propose GeoLoco, a purely RGB-driven locomotion framework that conceptualizes monocular images as high-dimensional 3D latent representations by harnessing the powerful geometric priors of a frozen, scale-aware Visual Foundation Model (VFM). Rather than naive feature concatenation, we design a proprioceptive-query multi-head cross-attention mechanism that dynamically attends to task-critical topological features conditioned on the robot's real-time gait phase. Crucially, to prevent the policy from overfitting to superficial textures, we introduce a dual-head auxiliary learning scheme. This explicit regularization forces the high-dimensional latent space to strictly align with the physical terrain geometry, ensuring robust zero-shot sim-to-real transfer. Trained exclusively in simulation, GeoLoco achieves robust zero-shot transfer to the Unitree G1 humanoid and successfully negotiates challenging terrains.
Latent-Space Autoregressive World Model for Efficient and Robust Image-Goal Navigation
Nov 14, 2025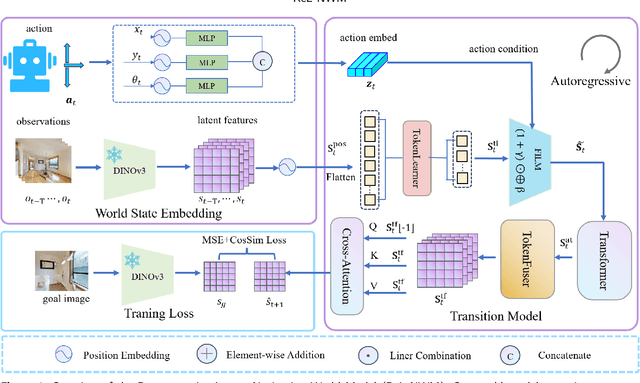
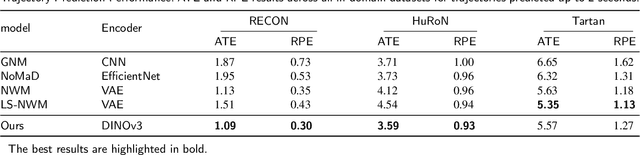

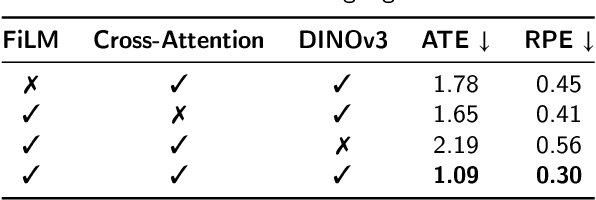
Traditional navigation methods rely heavily on accurate localization and mapping. In contrast, world models that capture environmental dynamics in latent space have opened up new perspectives for navigation tasks, enabling systems to move beyond traditional multi-module pipelines. However, world model often suffers from high computational costs in both training and inference. To address this, we propose LS-NWM - a lightweight latent space navigation world model that is trained and operates entirely in latent space, compared to the state-of-the-art baseline, our method reduces training time by approximately 3.2x and planning time by about 447x,while further improving navigation performance with a 35% higher SR and an 11% higher SPL. The key idea is that accurate pixel-wise environmental prediction is unnecessary for navigation. Instead, the model predicts future latent states based on current observational features and action inputs, then performs path planning and decision-making within this compact representation, significantly improving computational efficiency. By incorporating an autoregressive multi-frame prediction strategy during training, the model effectively captures long-term spatiotemporal dependencies, thereby enhancing navigation performance in complex scenarios. Experimental results demonstrate that our method achieves state-of-the-art navigation performance while maintaining a substantial efficiency advantage over existing approaches.
SurfAAV: Design and Implementation of a Novel Multimodal Surfing Aquatic-Aerial Vehicle
Jun 18, 2025



Despite significant advancements in the research of aquatic-aerial robots, existing configurations struggle to efficiently perform underwater, surface, and aerial movement simultaneously. In this paper, we propose a novel multimodal surfing aquatic-aerial vehicle, SurfAAV, which efficiently integrates underwater navigation, surface gliding, and aerial flying capabilities. Thanks to the design of the novel differential thrust vectoring hydrofoil, SurfAAV can achieve efficient surface gliding and underwater navigation without the need for a buoyancy adjustment system. This design provides flexible operational capabilities for both surface and underwater tasks, enabling the robot to quickly carry out underwater monitoring activities. Additionally, when it is necessary to reach another water body, SurfAAV can switch to aerial mode through a gliding takeoff, flying to the target water area to perform corresponding tasks. The main contribution of this letter lies in proposing a new solution for underwater, surface, and aerial movement, designing a novel hybrid prototype concept, developing the required control laws, and validating the robot's ability to successfully perform surface gliding and gliding takeoff. SurfAAV achieves a maximum surface gliding speed of 7.96 m/s and a maximum underwater speed of 3.1 m/s. The prototype's surface gliding maneuverability and underwater cruising maneuverability both exceed those of existing aquatic-aerial vehicles.
Deep Reinforcement Learning for Flipper Control of Tracked Robots
Jun 17, 2023



The autonomous control of flippers plays an important role in enhancing the intelligent operation of tracked robots within complex environments. While existing methods mainly rely on hand-crafted control models, in this paper, we introduce a novel approach that leverages deep reinforcement learning (DRL) techniques for autonomous flipper control in complex terrains. Specifically, we propose a new DRL network named AT-D3QN, which ensures safe and smooth flipper control for tracked robots. It comprises two modules, a feature extraction and fusion module for extracting and integrating robot and environment state features, and a deep Q-Learning control generation module for incorporating expert knowledge to obtain a smooth and efficient control strategy. To train the network, a novel reward function is proposed, considering both learning efficiency and passing smoothness. A simulation environment is constructed using the Pymunk physics engine for training. We then directly apply the trained model to a more realistic Gazebo simulation for quantitative analysis. The consistently high performance of the proposed approach validates its superiority over manual teleoperation.
ElC-OIS: Ellipsoidal Clustering for Open-World Instance Segmentation on LiDAR Data
Mar 08, 2023



Open-world Instance Segmentation (OIS) is a challenging task that aims to accurately segment every object instance appearing in the current observation, regardless of whether these instances have been labeled in the training set. This is important for safety-critical applications such as robust autonomous navigation. In this paper, we present a flexible and effective OIS framework for LiDAR point cloud that can accurately segment both known and unknown instances (i.e., seen and unseen instance categories during training). It first identifies points belonging to known classes and removes the background by leveraging close-set panoptic segmentation networks. Then, we propose a novel ellipsoidal clustering method that is more adapted to the characteristic of LiDAR scans and allows precise segmentation of unknown instances. Furthermore, a diffuse searching method is proposed to handle the common over-segmentation problem presented in the known instances. With the combination of these techniques, we are able to achieve accurate segmentation for both known and unknown instances. We evaluated our method on the SemanticKITTI open-world LiDAR instance segmentation dataset. The experimental results suggest that it outperforms current state-of-the-art methods, especially with a 10.0% improvement in association quality. The source code of our method will be publicly available at https://github.com/nubot-nudt/ElC-OIS.