 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBEVDiffLoc: End-to-End LiDAR Global Localization in BEV View based on Diffusion Model
Mar 14, 2025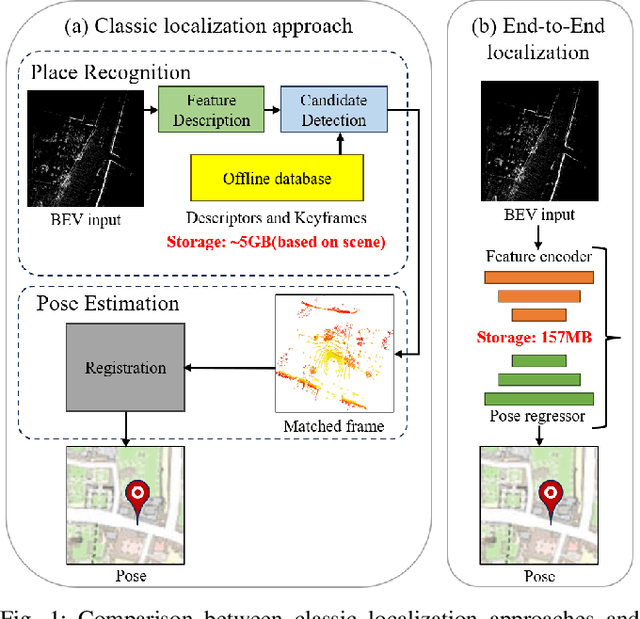
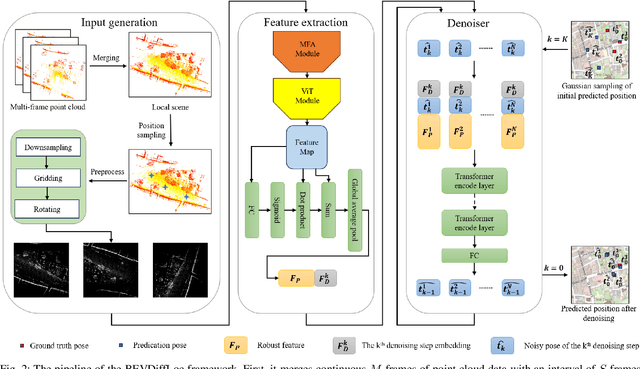
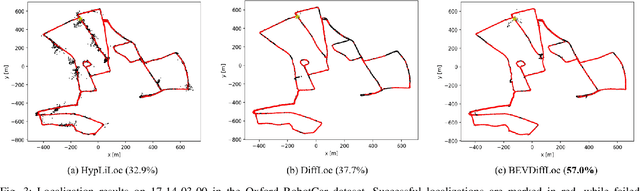
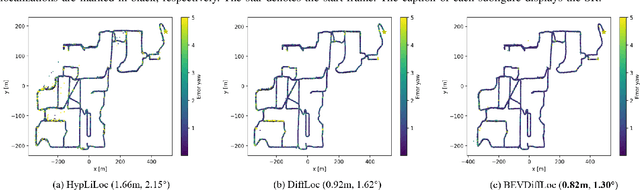
Localization is one of the core parts of modern robotics. Classic localization methods typically follow the retrieve-then-register paradigm, achieving remarkable success. Recently, the emergence of end-to-end localization approaches has offered distinct advantages, including a streamlined system architecture and the elimination of the need to store extensive map data. Although these methods have demonstrated promising results, current end-to-end localization approaches still face limitations in robustness and accuracy. Bird's-Eye-View (BEV) image is one of the most widely adopted data representations in autonomous driving. It significantly reduces data complexity while preserving spatial structure and scale consistency, making it an ideal representation for localization tasks. However, research on BEV-based end-to-end localization remains notably insufficient. To fill this gap, we propose BEVDiffLoc, a novel framework that formulates LiDAR localization as a conditional generation of poses. Leveraging the properties of BEV, we first introduce a specific data augmentation method to significantly enhance the diversity of input data. Then, the Maximum Feature Aggregation Module and Vision Transformer are employed to learn robust features while maintaining robustness against significant rotational view variations. Finally, we incorporate a diffusion model that iteratively refines the learned features to recover the absolute pose. Extensive experiments on the Oxford Radar RobotCar and NCLT datasets demonstrate that BEVDiffLoc outperforms the baseline methods. Our code is available at https://github.com/nubot-nudt/BEVDiffLoc.
A Novel Decomposed Feature-Oriented Framework for Open-Set Semantic Segmentation on LiDAR Data
Mar 14, 2025



Semantic segmentation is a key technique that enables mobile robots to understand and navigate surrounding environments autonomously. However, most existing works focus on segmenting known objects, overlooking the identification of unknown classes, which is common in real-world applications. In this paper, we propose a feature-oriented framework for open-set semantic segmentation on LiDAR data, capable of identifying unknown objects while retaining the ability to classify known ones. We design a decomposed dual-decoder network to simultaneously perform closed-set semantic segmentation and generate distinctive features for unknown objects. The network is trained with multi-objective loss functions to capture the characteristics of known and unknown objects. Using the extracted features, we introduce an anomaly detection mechanism to identify unknown objects. By integrating the results of close-set semantic segmentation and anomaly detection, we achieve effective feature-driven LiDAR open-set semantic segmentation. Evaluations on both SemanticKITTI and nuScenes datasets demonstrate that our proposed framework significantly outperforms state-of-the-art methods. The source code will be made publicly available at https://github.com/nubot-nudt/DOSS.
ElC-OIS: Ellipsoidal Clustering for Open-World Instance Segmentation on LiDAR Data
Mar 08, 2023



Open-world Instance Segmentation (OIS) is a challenging task that aims to accurately segment every object instance appearing in the current observation, regardless of whether these instances have been labeled in the training set. This is important for safety-critical applications such as robust autonomous navigation. In this paper, we present a flexible and effective OIS framework for LiDAR point cloud that can accurately segment both known and unknown instances (i.e., seen and unseen instance categories during training). It first identifies points belonging to known classes and removes the background by leveraging close-set panoptic segmentation networks. Then, we propose a novel ellipsoidal clustering method that is more adapted to the characteristic of LiDAR scans and allows precise segmentation of unknown instances. Furthermore, a diffuse searching method is proposed to handle the common over-segmentation problem presented in the known instances. With the combination of these techniques, we are able to achieve accurate segmentation for both known and unknown instances. We evaluated our method on the SemanticKITTI open-world LiDAR instance segmentation dataset. The experimental results suggest that it outperforms current state-of-the-art methods, especially with a 10.0% improvement in association quality. The source code of our method will be publicly available at https://github.com/nubot-nudt/ElC-OIS.