 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlocking phase transition and threat responses in bio-inspired autonomous drone swarms
Dec 24, 2025Collective motion inspired by animal groups offers powerful design principles for autonomous aerial swarms. We present a bio-inspired 3D flocking algorithm in which each drone interacts only with a minimal set of influential neighbors, relying solely on local alignment and attraction cues. By systematically tuning these two interaction gains, we map a phase diagram revealing sharp transitions between swarming and schooling, as well as a critical region where susceptibility, polarization fluctuations, and reorganization capacity peak. Outdoor experiments with a swarm of ten drones, combined with simulations using a calibrated flight-dynamics model, show that operating near this transition enhances responsiveness to external disturbances. When confronted with an intruder, the swarm performs rapid collective turns, transient expansions, and reliably recovers high alignment within seconds. These results demonstrate that minimal local-interaction rules are sufficient to generate multiple collective phases and that simple gain modulation offers an efficient mechanism to adjust stability, flexibility, and resilience in drone swarms.
Optimized Area Coverage in Disaster Response Utilizing Autonomous UAV Swarm Formations
Dec 08, 2025This paper presents a UAV swarm system designed to assist first responders in disaster scenarios like wildfires. By distributing sensors across multiple agents, the system extends flight duration and enhances data availability, reducing the risk of mission failure due to collisions. To mitigate this risk further, we introduce an autonomous navigation framework that utilizes a local Euclidean Signed Distance Field (ESDF) map for obstacle avoidance while maintaining swarm formation with minimal path deviation. Additionally, we incorporate a Traveling Salesman Problem (TSP) variant to optimize area coverage, prioritizing Points of Interest (POIs) based on preassigned values derived from environmental behavior and critical infrastructure. The proposed system is validated through simulations with varying swarm sizes, demonstrating its ability to maximize coverage while ensuring collision avoidance between UAVs and obstacles.
Modelling and Hovering Stabilisation of a Free-Rotating Wing UAV
Jun 25, 2024We propose a multibody model of a freewing UAV. This model allows obtaining simulations of the UAV's behaviour and, in the future, to design a control law stabilising the entire flight envelope (hovering and forward flight). We also describe the realisation of a prototype and a comparison of possible methods for estimating the UAV's states. With this prototype, we report on experimental hovering flights with a non-linear incremental dynamic inversion controller to stabilise the wing and a proportional derivative controller for the fuselage stabilization.
Guiding vector fields in Paparazzi autopilot
Jun 20, 2021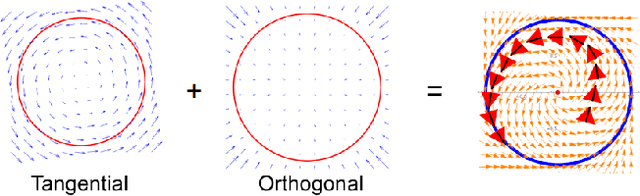
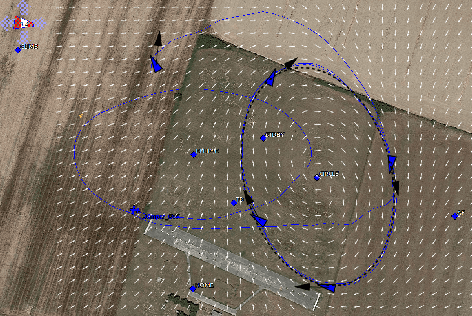

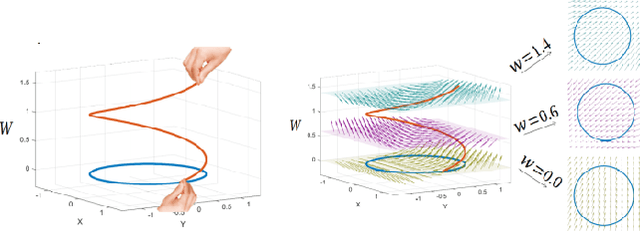
This article is a technical report on the two different guidance systems based on vector fields that can be found in Paparazzi, a free sw/hw autopilot. Guiding vector fields allow autonomous vehicles to track paths described by the user mathematically. In particular, we allow two descriptions of the path with an implicit or a parametric function. Each description is associated with its corresponding guiding vector field algorithm. The implementations of the two algorithms are light enough to be run in a modern microcontroller. We will cover the basic theory on how they work, how a user can implement its own paths in Paparazzi, how to exploit them to coordinate multiple vehicles, and we finish with some experimental results. Although the presented implementation is focused on fixed-wing aircraft, the guidance is also applicable to other kinds of aerial vehicles such as rotorcraft.
Distributed circular formation flight of fixed-wing aircraft with Paparazzi autopilot
Sep 04, 2017



In this paper we introduce the usage of guidance vector fields for the coordination and formation flight of fixed-wing aircraft. In particular, we describe in detail the technological implementation of the formation flight control for a fully distributed execution of the algorithm by employing the open-source project Paparazzi. In this context, distributed means that each aircraft executes the algorithm on board, each aircraft only needs information about its neighbors, and the implementation is straightforwardly scalable to an arbitrary number of vehicles, i.e., the needed resources such as memory or computational power not necessarily scale with the number of total aircraft. The coordination is based on commanding the aircraft to track circumferences with different radii but sharing the same center. Consequently, the vehicles will travel different distances but with the same speeds in order to control their relative angles in the circumference, i.e., their orbital velocities. We show the effectiveness of the proposed design with actual formation flights during the drone parade in IMAV2017.
Circular formation control of fixed-wing UAVs with constant speeds
Mar 22, 2017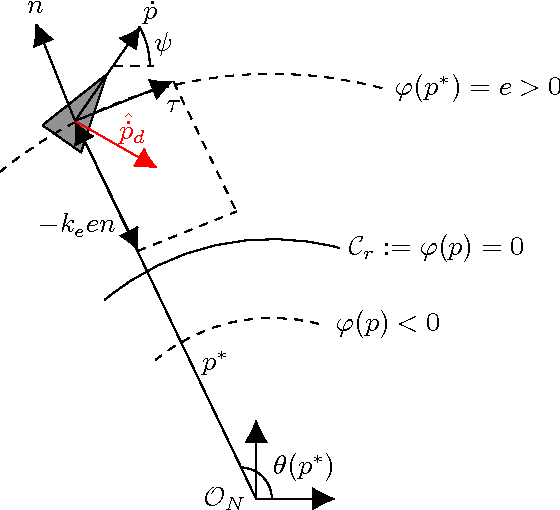


In this paper we propose an algorithm for stabilizing circular formations of fixed-wing UAVs with constant speeds. The algorithm is based on the idea of tracking circles with different radii in order to control the inter-vehicle phases with respect to a target circumference. We prove that the desired equilibrium is exponentially stable and thanks to the guidance vector field that guides the vehicles, the algorithm can be extended to other closed trajectories. One of the main advantages of this approach is that the algorithm guarantees the confinement of the team in a specific area, even when communications or sensing among vehicles are lost. We show the effectiveness of the algorithm with an actual formation flight of three aircraft. The algorithm is ready to use for the general public in the open-source Paparazzi autopilot.
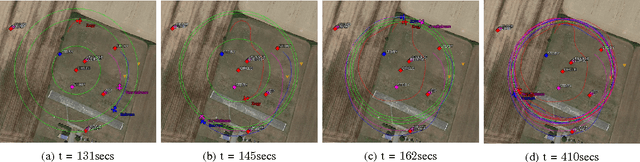
Guidance algorithm for smooth trajectory tracking of a fixed wing UAV flying in wind flows
Feb 15, 2017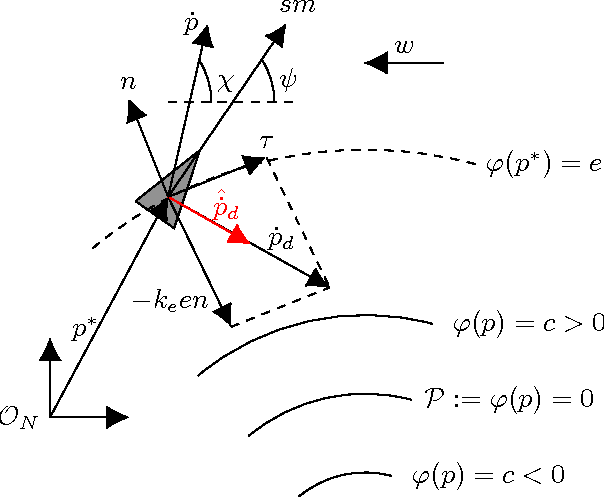
This paper presents an algorithm for solving the problem of tracking smooth curves by a fixed wing unmanned aerial vehicle travelling with a constant airspeed and under a constant wind disturbance. The algorithm is based on the idea of following a guiding vector field which is constructed from the implicit function that describes the desired (possibly time-varying) trajectory. The output of the algorithm can be directly expressed in terms of the bank angle of the UAV in order to achieve coordinated turns. Furthermore, the algorithm can be tuned offline such that physical constraints of the UAV, e.g. the maximum bank angle, will not be violated in a neighborhood of the desired trajectory. We provide the corresponding theoretical convergence analysis and performance results from actual flights.
* 6 pages