 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeaderless collective motions in affine formation control
Paper and Code
Apr 07, 2021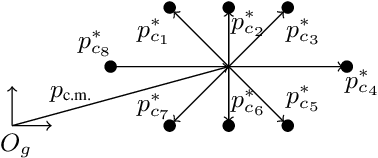
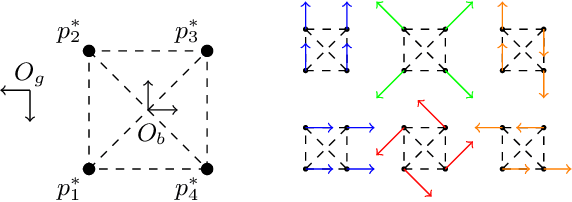

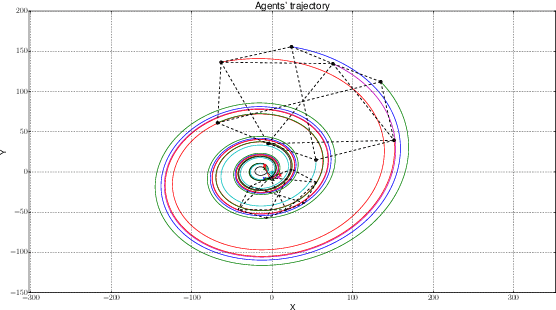
This paper proposes a novel distributed technique to induce collective motions in affine formation control. Instead of the traditional leader-follower strategy, we propose modifying the original weights that build the Laplacian matrix so that a designed steady-state motion of the desired shape emerges from the agents' local interactions. The proposed technique allows a rich collection of collective motions such as rotations around the centroid, translations, scalings, and shearings of a reference shape. These motions can be applied in useful collective behaviors such as \emph{shaped} consensus (the rendezvous with a particular shape), escorting one of the team agents, or area coverage. We prove the global stability and effectiveness of our proposed technique rigorously, and we provide some illustrative numerical simulations.