 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePAIWorld: A 3D-Consistent World Foundation Model for Robotic Manipulation
Jun 16, 2026World foundation models (WFMs) are powerful simulators, yet they predominantly operate in a single-view setting and lack the multi-view 3D consistency required for robotic manipulation. While robotic systems rely on multiple cameras (egocentric, eye-to-hand, and wrist-mounted) for policy learning, current multi-view world models simply concatenate view tokens without explicit geometric reasoning. This causes cross-view object drift, depth inconsistency, and texture misalignment. We trace these failures to two deficiencies: the absence of an explicit inter-view communication mechanism and the lack of a 3D geometric prior. We argue that resolving both simultaneously is necessary and sufficient. To address this, we present PAIWorld, a framework that augments diffusion-transformer world models via three core components: (1) Geometry-Aware Cross-View Attention blocks that establish an explicit pathway across views, (2) Geometric Rotary Position Embedding that encodes camera ray directions and extrinsic poses into the attention mechanism, and (3) Latent 3D-REPA, which distills 3D-aware features from frozen 3D foundation models to ensure 3D consistency. Built upon a DiT-based world foundation model, PAIWorld achieves state-of-the-art multi-view 3D consistency on robotic manipulation benchmarks, ranking 1st on the WorldArena leaderboard and 2nd on the AgiBot-Challenge2026 leaderboard, while enabling downstream applications such as model-based planning, world action models, and multi-view policy post-training.
Distributed end-effector formation control for mixed fully- and under-actuated manipulators with flexible joints
Oct 02, 2023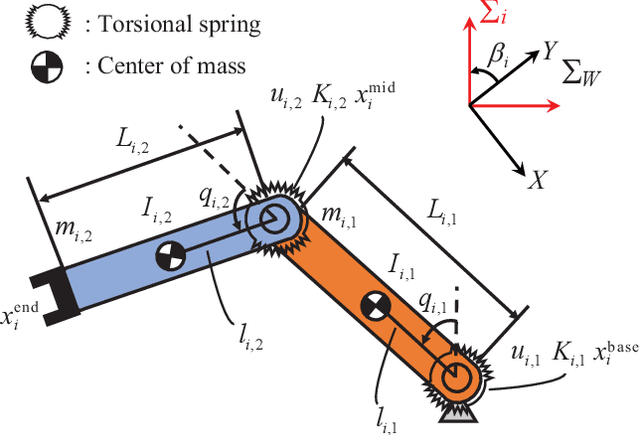
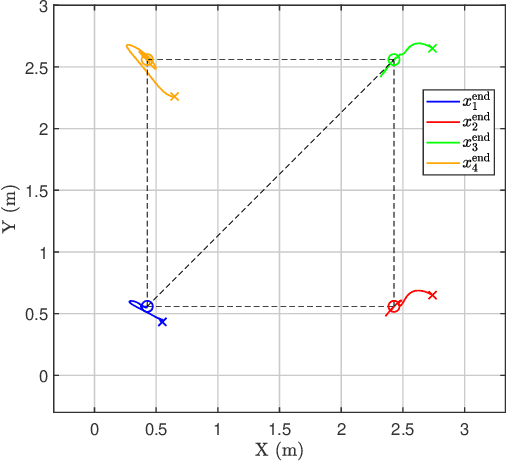
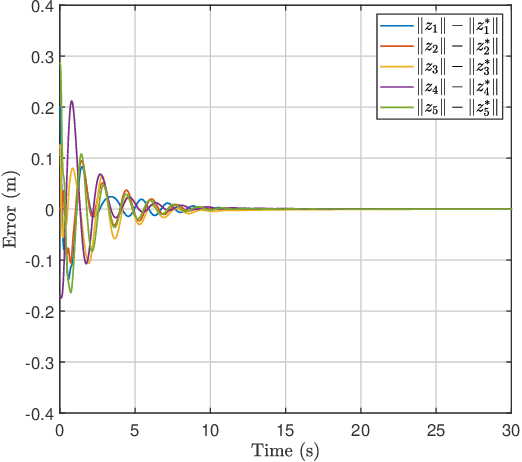
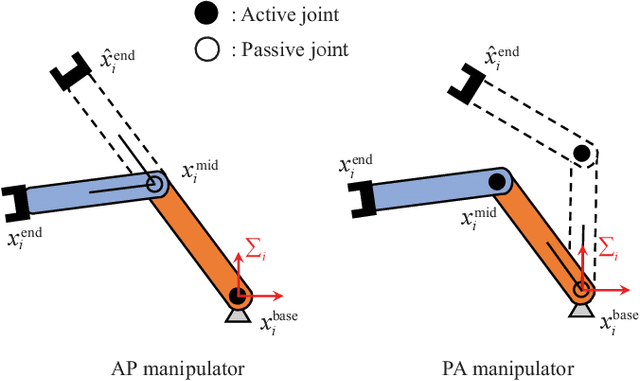
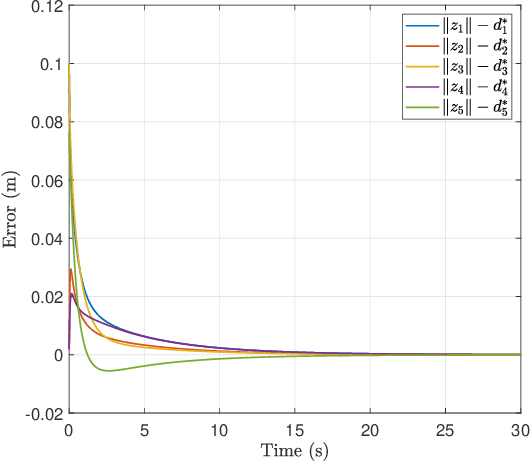
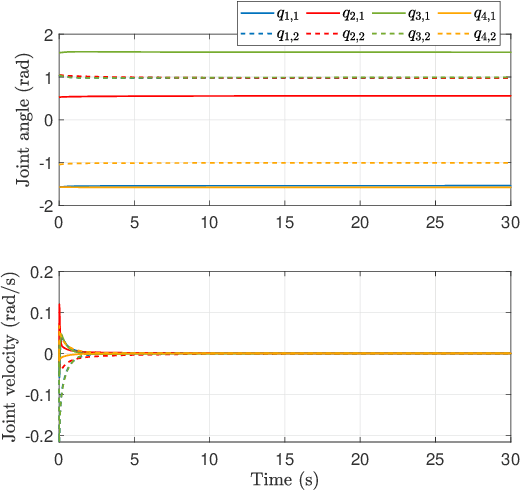
The presence of faulty or underactuated manipulators can disrupt the end-effector formation keeping of a team of manipulators. Based on two-link planar manipulators, we investigate this end-effector formation keeping problem for mixed fully- and under-actuated manipulators with flexible joints. In this case, the underactuated manipulators can comprise of active-passive (AP) manipulators, passive-active (PA) manipulators, or a combination thereof. We propose distributed control laws for the different types of manipulators to achieve and maintain the desired formation shape of the end-effectors. It is achieved by assigning virtual springs to the end-effectors for the fully-actuated ones and to the virtual end-effectors for the under-actuated ones. We study further the set of all desired and reachable shapes for the networked manipulators' end-effectors. Finally, we validate our analysis via numerical simulations.
Distributed formation control of end-effector of mixed planar fully- and under-actuated manipulators
Sep 14, 2023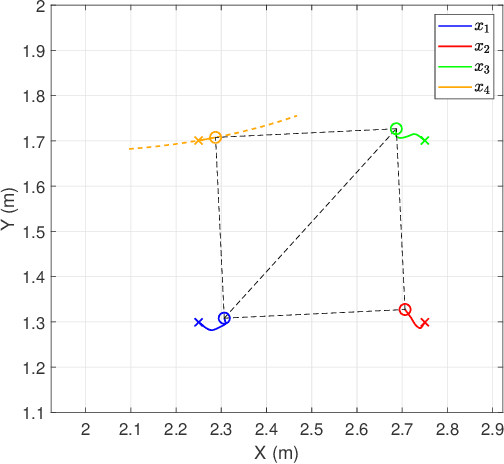
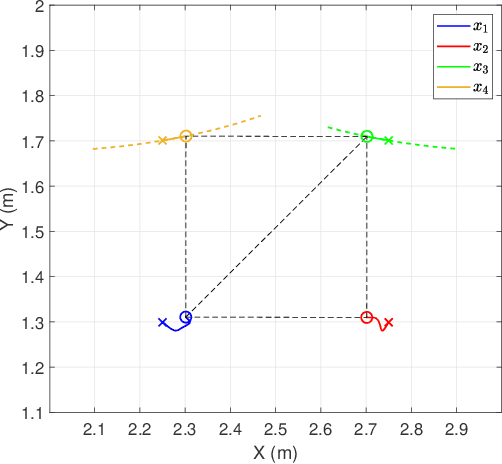
This paper addresses the problem of end-effector formation control for a mixed group of two-link manipulators moving in a horizontal plane that comprises of fully-actuated manipulators and underactuated manipulators with only the second joint being actuated (referred to as the passive-active (PA) manipulators). The problem is solved by extending the distributed end-effector formation controller for the fully-actuated manipulator to the PA manipulator moving in a horizontal plane by using its integrability. This paper presents stability analysis of the closed-loop systems under a given necessary condition, and we prove that the manipulators' end-effector converge to the desired formation shape. The proposed method is validated by simulations.