 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDGH: Dynamic Gaussian Hair
Dec 18, 2025The creation of photorealistic dynamic hair remains a major challenge in digital human modeling because of the complex motions, occlusions, and light scattering. Existing methods often resort to static capture and physics-based models that do not scale as they require manual parameter fine-tuning to handle the diversity of hairstyles and motions, and heavy computation to obtain high-quality appearance. In this paper, we present Dynamic Gaussian Hair (DGH), a novel framework that efficiently learns hair dynamics and appearance. We propose: (1) a coarse-to-fine model that learns temporally coherent hair motion dynamics across diverse hairstyles; (2) a strand-guided optimization module that learns a dynamic 3D Gaussian representation for hair appearance with support for differentiable rendering, enabling gradient-based learning of view-consistent appearance under motion. Unlike prior simulation-based pipelines, our approach is fully data-driven, scales with training data, and generalizes across various hairstyles and head motion sequences. Additionally, DGH can be seamlessly integrated into a 3D Gaussian avatar framework, enabling realistic, animatable hair for high-fidelity avatar representation. DGH achieves promising geometry and appearance results, providing a scalable, data-driven alternative to physics-based simulation and rendering.
MHR: Momentum Human Rig
Nov 19, 2025We present MHR, a parametric human body model that combines the decoupled skeleton/shape paradigm of ATLAS with a flexible, modern rig and pose corrective system inspired by the Momentum library. Our model enables expressive, anatomically plausible human animation, supporting non-linear pose correctives, and is designed for robust integration in AR/VR and graphics pipelines.
SplatFields: Neural Gaussian Splats for Sparse 3D and 4D Reconstruction
Sep 17, 2024



Digitizing 3D static scenes and 4D dynamic events from multi-view images has long been a challenge in computer vision and graphics. Recently, 3D Gaussian Splatting (3DGS) has emerged as a practical and scalable reconstruction method, gaining popularity due to its impressive reconstruction quality, real-time rendering capabilities, and compatibility with widely used visualization tools. However, the method requires a substantial number of input views to achieve high-quality scene reconstruction, introducing a significant practical bottleneck. This challenge is especially severe in capturing dynamic scenes, where deploying an extensive camera array can be prohibitively costly. In this work, we identify the lack of spatial autocorrelation of splat features as one of the factors contributing to the suboptimal performance of the 3DGS technique in sparse reconstruction settings. To address the issue, we propose an optimization strategy that effectively regularizes splat features by modeling them as the outputs of a corresponding implicit neural field. This results in a consistent enhancement of reconstruction quality across various scenarios. Our approach effectively handles static and dynamic cases, as demonstrated by extensive testing across different setups and scene complexities.
ANIM: Accurate Neural Implicit Model for Human Reconstruction from a single RGB-D image
Mar 18, 2024



Recent progress in human shape learning, shows that neural implicit models are effective in generating 3D human surfaces from limited number of views, and even from a single RGB image. However, existing monocular approaches still struggle to recover fine geometric details such as face, hands or cloth wrinkles. They are also easily prone to depth ambiguities that result in distorted geometries along the camera optical axis. In this paper, we explore the benefits of incorporating depth observations in the reconstruction process by introducing ANIM, a novel method that reconstructs arbitrary 3D human shapes from single-view RGB-D images with an unprecedented level of accuracy. Our model learns geometric details from both multi-resolution pixel-aligned and voxel-aligned features to leverage depth information and enable spatial relationships, mitigating depth ambiguities. We further enhance the quality of the reconstructed shape by introducing a depth-supervision strategy, which improves the accuracy of the signed distance field estimation of points that lie on the reconstructed surface. Experiments demonstrate that ANIM outperforms state-of-the-art works that use RGB, surface normals, point cloud or RGB-D data as input. In addition, we introduce ANIM-Real, a new multi-modal dataset comprising high-quality scans paired with consumer-grade RGB-D camera, and our protocol to fine-tune ANIM, enabling high-quality reconstruction from real-world human capture.
HISR: Hybrid Implicit Surface Representation for Photorealistic 3D Human Reconstruction
Dec 28, 2023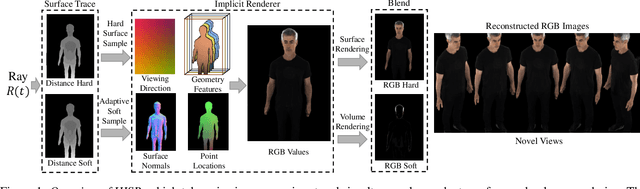
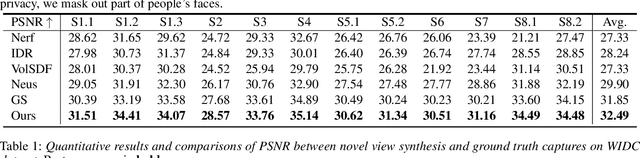
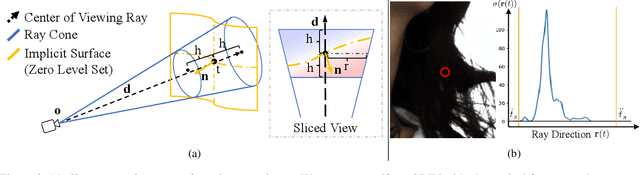
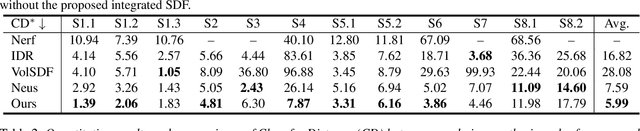
Neural reconstruction and rendering strategies have demonstrated state-of-the-art performances due, in part, to their ability to preserve high level shape details. Existing approaches, however, either represent objects as implicit surface functions or neural volumes and still struggle to recover shapes with heterogeneous materials, in particular human skin, hair or clothes. To this aim, we present a new hybrid implicit surface representation to model human shapes. This representation is composed of two surface layers that represent opaque and translucent regions on the clothed human body. We segment different regions automatically using visual cues and learn to reconstruct two signed distance functions (SDFs). We perform surface-based rendering on opaque regions (e.g., body, face, clothes) to preserve high-fidelity surface normals and volume rendering on translucent regions (e.g., hair). Experiments demonstrate that our approach obtains state-of-the-art results on 3D human reconstructions, and also shows competitive performances on other objects.
NSF: Neural Surface Fields for Human Modeling from Monocular Depth
Aug 30, 2023Obtaining personalized 3D animatable avatars from a monocular camera has several real world applications in gaming, virtual try-on, animation, and VR/XR, etc. However, it is very challenging to model dynamic and fine-grained clothing deformations from such sparse data. Existing methods for modeling 3D humans from depth data have limitations in terms of computational efficiency, mesh coherency, and flexibility in resolution and topology. For instance, reconstructing shapes using implicit functions and extracting explicit meshes per frame is computationally expensive and cannot ensure coherent meshes across frames. Moreover, predicting per-vertex deformations on a pre-designed human template with a discrete surface lacks flexibility in resolution and topology. To overcome these limitations, we propose a novel method `\keyfeature: Neural Surface Fields' for modeling 3D clothed humans from monocular depth. NSF defines a neural field solely on the base surface which models a continuous and flexible displacement field. NSF can be adapted to the base surface with different resolution and topology without retraining at inference time. Compared to existing approaches, our method eliminates the expensive per-frame surface extraction while maintaining mesh coherency, and is capable of reconstructing meshes with arbitrary resolution without retraining. To foster research in this direction, we release our code in project page at: https://yuxuan-xue.com/nsf.
VIVE3D: Viewpoint-Independent Video Editing using 3D-Aware GANs
Mar 28, 2023We introduce VIVE3D, a novel approach that extends the capabilities of image-based 3D GANs to video editing and is able to represent the input video in an identity-preserving and temporally consistent way. We propose two new building blocks. First, we introduce a novel GAN inversion technique specifically tailored to 3D GANs by jointly embedding multiple frames and optimizing for the camera parameters. Second, besides traditional semantic face edits (e.g. for age and expression), we are the first to demonstrate edits that show novel views of the head enabled by the inherent properties of 3D GANs and our optical flow-guided compositing technique to combine the head with the background video. Our experiments demonstrate that VIVE3D generates high-fidelity face edits at consistent quality from a range of camera viewpoints which are composited with the original video in a temporally and spatially consistent manner.
Pose-NDF: Modeling Human Pose Manifolds with Neural Distance Fields
Jul 27, 2022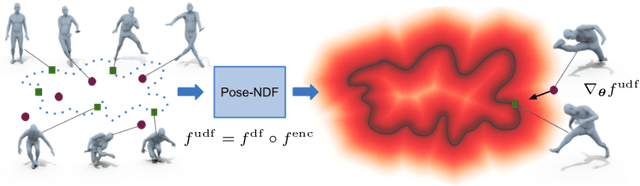
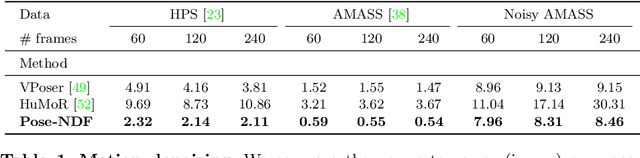
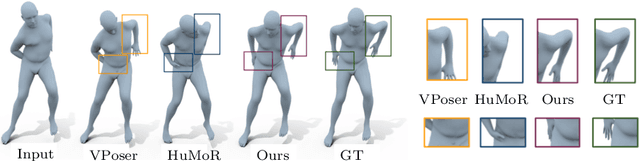
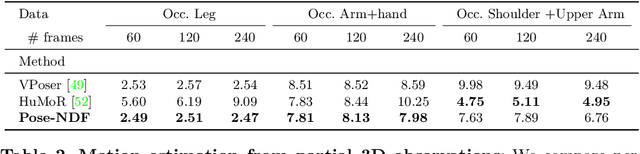
We present Pose-NDF, a continuous model for plausible human poses based on neural distance fields (NDFs). Pose or motion priors are important for generating realistic new poses and for reconstructing accurate poses from noisy or partial observations. Pose-NDF learns a manifold of plausible poses as the zero level set of a neural implicit function, extending the idea of modeling implicit surfaces in 3D to the high-dimensional domain SO(3)^K, where a human pose is defined by a single data point, represented by K quaternions. The resulting high-dimensional implicit function can be differentiated with respect to the input poses and thus can be used to project arbitrary poses onto the manifold by using gradient descent on the set of 3-dimensional hyperspheres. In contrast to previous VAE-based human pose priors, which transform the pose space into a Gaussian distribution, we model the actual pose manifold, preserving the distances between poses. We demonstrate that PoseNDF outperforms existing state-of-the-art methods as a prior in various downstream tasks, ranging from denoising real-world human mocap data, pose recovery from occluded data to 3D pose reconstruction from images. Furthermore, we show that it can be used to generate more diverse poses by random sampling and projection than VAE-based methods.
* Project page: https://virtualhumans.mpi-inf.mpg.de/posendf
BodyMap: Learning Full-Body Dense Correspondence Map
May 18, 2022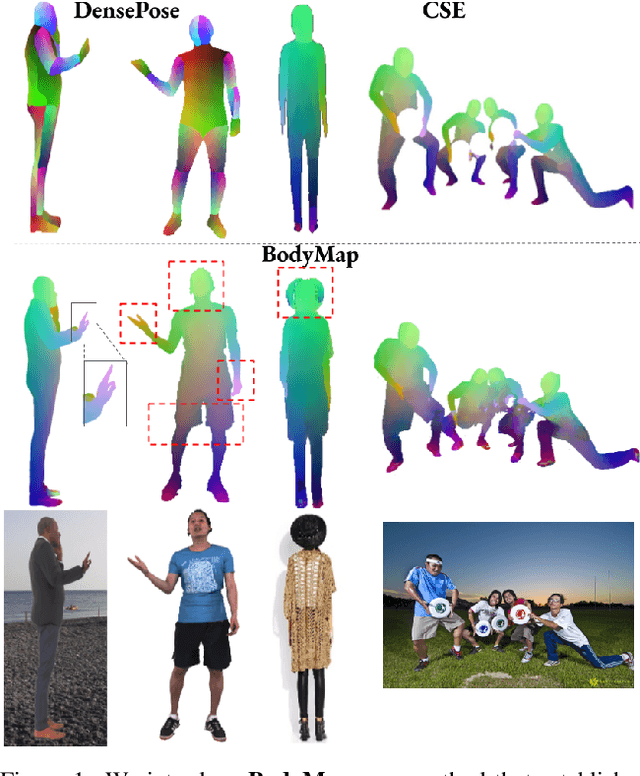
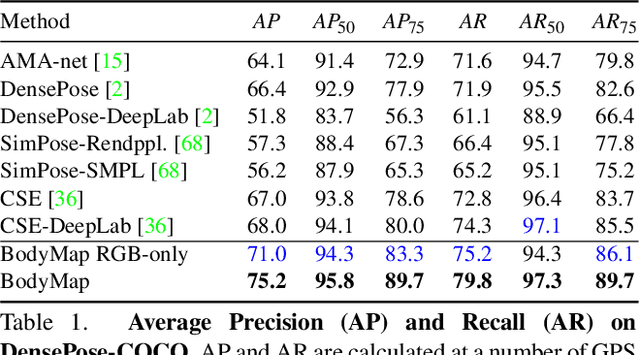
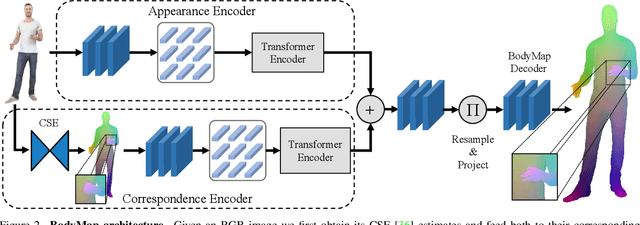
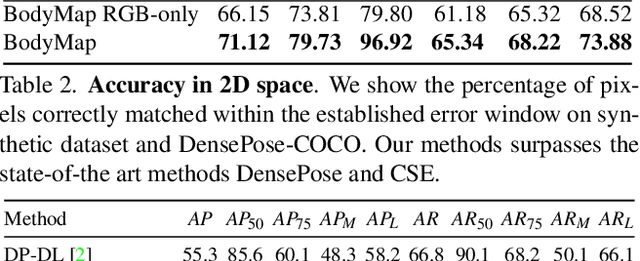
Dense correspondence between humans carries powerful semantic information that can be utilized to solve fundamental problems for full-body understanding such as in-the-wild surface matching, tracking and reconstruction. In this paper we present BodyMap, a new framework for obtaining high-definition full-body and continuous dense correspondence between in-the-wild images of clothed humans and the surface of a 3D template model. The correspondences cover fine details such as hands and hair, while capturing regions far from the body surface, such as loose clothing. Prior methods for estimating such dense surface correspondence i) cut a 3D body into parts which are unwrapped to a 2D UV space, producing discontinuities along part seams, or ii) use a single surface for representing the whole body, but none handled body details. Here, we introduce a novel network architecture with Vision Transformers that learn fine-level features on a continuous body surface. BodyMap outperforms prior work on various metrics and datasets, including DensePose-COCO by a large margin. Furthermore, we show various applications ranging from multi-layer dense cloth correspondence, neural rendering with novel-view synthesis and appearance swapping.
Animatable Neural Radiance Fields from Monocular RGB-D
Apr 04, 2022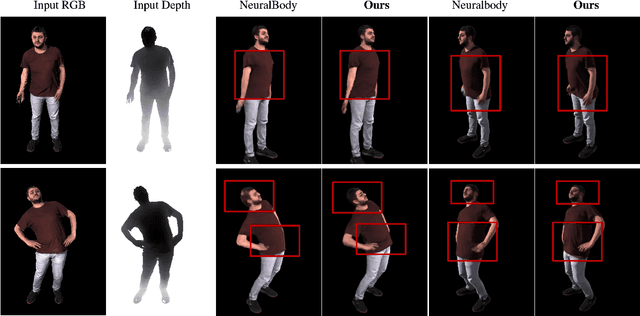
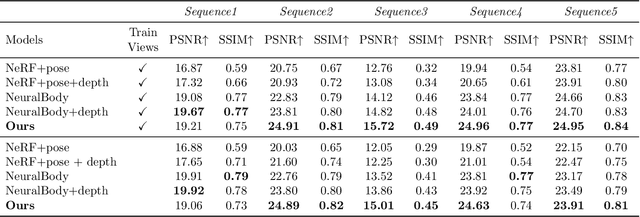
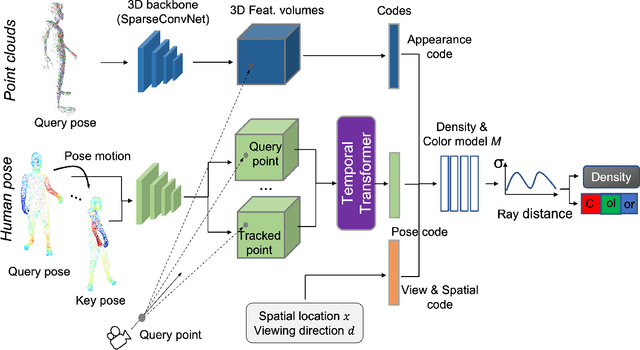

This paper aims at representing animatable photo-realistic humans under novel views and poses. Recent work has shown significant progress with dynamic scenes by exploring shared canonical neural radiance fields. However learning a user-controlled model for novel poses remains a challenging task. To tackle this problem, we introduce a novel method to integrate observations across frames and encode the appearance at each individual frame by utilizing the human pose that models the body shape and point clouds which cover partial part of the human as the input. Specifically, our method simultaneously learns a shared set of latent codes anchored to the human pose among frames, and learns an appearance-dependent code anchored to incomplete point clouds generated by monocular RGB-D at each frame. A human pose-based code models the shape of the performer whereas a point cloud based code predicts details and reasons about missing structures at the unseen poses. To further recover non-visible regions in query frames, we utilize a temporal transformer to integrate features of points in query frames and tracked body points from automatically-selected key frames. Experiments on various sequences of humans in motion show that our method significantly outperforms existing works under unseen poses and novel views given monocular RGB-D videos as input.