 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPAMs: Structured Implicit Parametric Models
Jan 20, 2022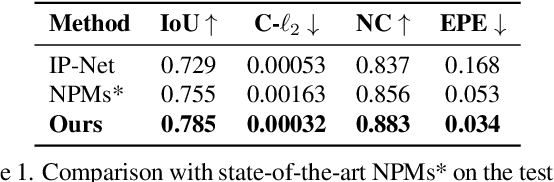
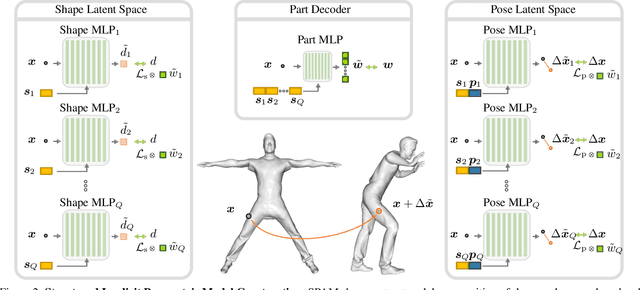
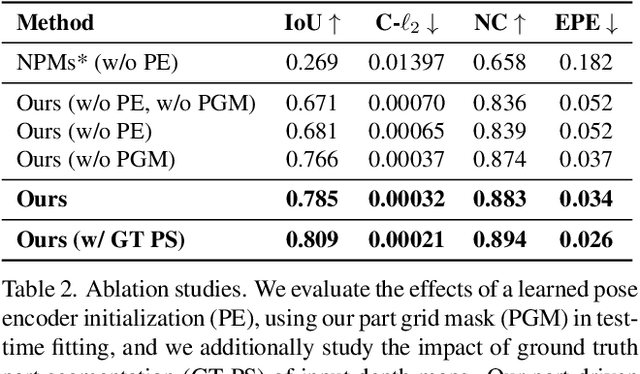
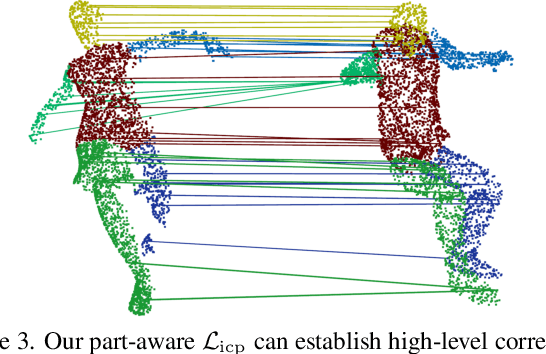
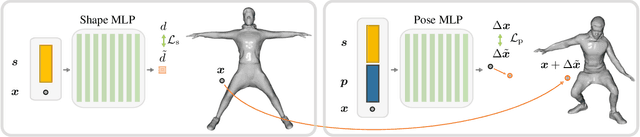
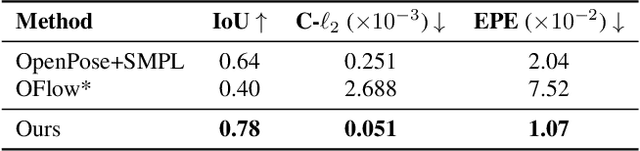
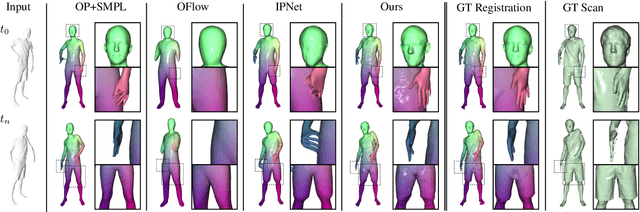
Parametric 3D models have formed a fundamental role in modeling deformable objects, such as human bodies, faces, and hands; however, the construction of such parametric models requires significant manual intervention and domain expertise. Recently, neural implicit 3D representations have shown great expressibility in capturing 3D shape geometry. We observe that deformable object motion is often semantically structured, and thus propose to learn Structured-implicit PArametric Models (SPAMs) as a deformable object representation that structurally decomposes non-rigid object motion into part-based disentangled representations of shape and pose, with each being represented by deep implicit functions. This enables a structured characterization of object movement, with part decomposition characterizing a lower-dimensional space in which we can establish coarse motion correspondence. In particular, we can leverage the part decompositions at test time to fit to new depth sequences of unobserved shapes, by establishing part correspondences between the input observation and our learned part spaces; this guides a robust joint optimization between the shape and pose of all parts, even under dramatic motion sequences. Experiments demonstrate that our part-aware shape and pose understanding lead to state-of-the-art performance in reconstruction and tracking of depth sequences of complex deforming object motion. We plan to release models to the public at https://pablopalafox.github.io/spams.
TransformerFusion: Monocular RGB Scene Reconstruction using Transformers
Jul 05, 2021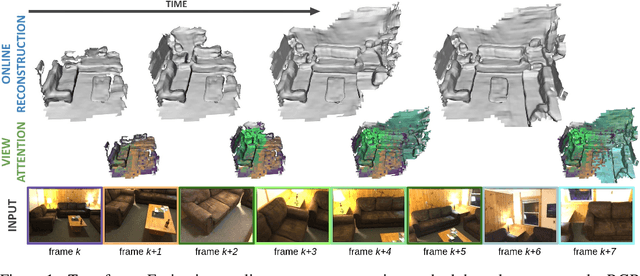
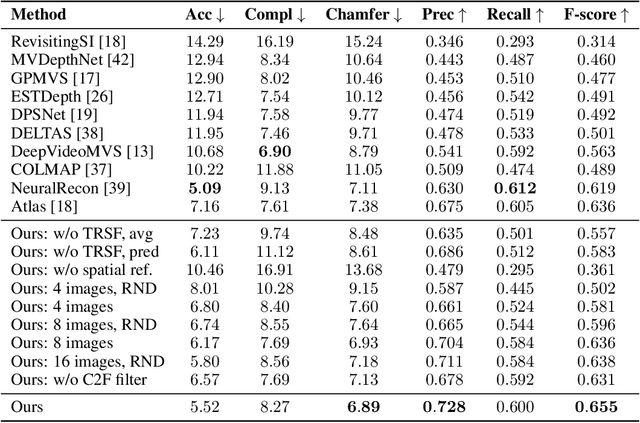
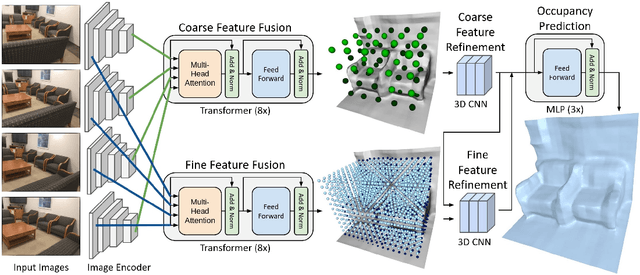

We introduce TransformerFusion, a transformer-based 3D scene reconstruction approach. From an input monocular RGB video, the video frames are processed by a transformer network that fuses the observations into a volumetric feature grid representing the scene; this feature grid is then decoded into an implicit 3D scene representation. Key to our approach is the transformer architecture that enables the network to learn to attend to the most relevant image frames for each 3D location in the scene, supervised only by the scene reconstruction task. Features are fused in a coarse-to-fine fashion, storing fine-level features only where needed, requiring lower memory storage and enabling fusion at interactive rates. The feature grid is then decoded to a higher-resolution scene reconstruction, using an MLP-based surface occupancy prediction from interpolated coarse-to-fine 3D features. Our approach results in an accurate surface reconstruction, outperforming state-of-the-art multi-view stereo depth estimation methods, fully-convolutional 3D reconstruction approaches, and approaches using LSTM- or GRU-based recurrent networks for video sequence fusion.
NPMs: Neural Parametric Models for 3D Deformable Shapes
Apr 01, 2021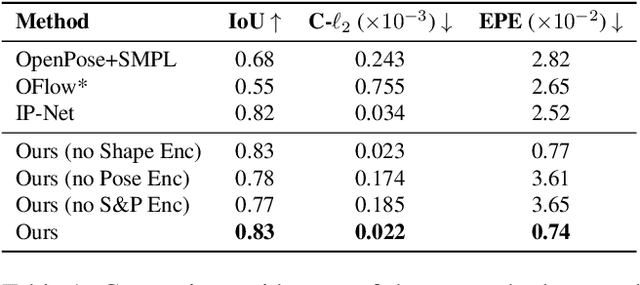
Parametric 3D models have enabled a wide variety of tasks in computer graphics and vision, such as modeling human bodies, faces, and hands. However, the construction of these parametric models is often tedious, as it requires heavy manual tweaking, and they struggle to represent additional complexity and details such as wrinkles or clothing. To this end, we propose Neural Parametric Models (NPMs), a novel, learned alternative to traditional, parametric 3D models, which does not require hand-crafted, object-specific constraints. In particular, we learn to disentangle 4D dynamics into latent-space representations of shape and pose, leveraging the flexibility of recent developments in learned implicit functions. Crucially, once learned, our neural parametric models of shape and pose enable optimization over the learned spaces to fit to new observations, similar to the fitting of a traditional parametric model, e.g., SMPL. This enables NPMs to achieve a significantly more accurate and detailed representation of observed deformable sequences. We show that NPMs improve notably over both parametric and non-parametric state of the art in reconstruction and tracking of monocular depth sequences of clothed humans and hands. Latent-space interpolation as well as shape / pose transfer experiments further demonstrate the usefulness of NPMs.
Neural Deformation Graphs for Globally-consistent Non-rigid Reconstruction
Dec 02, 2020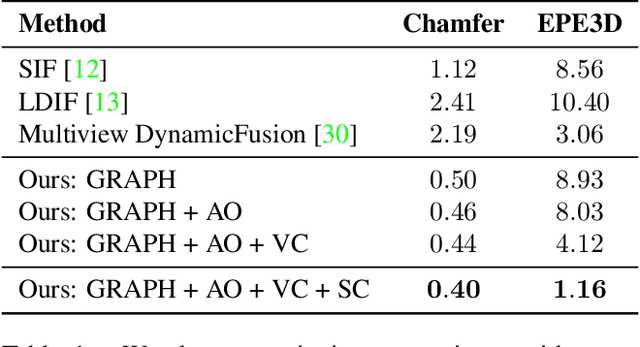
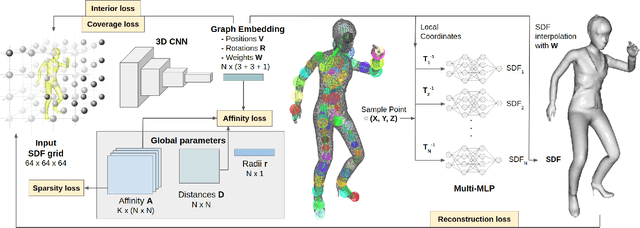
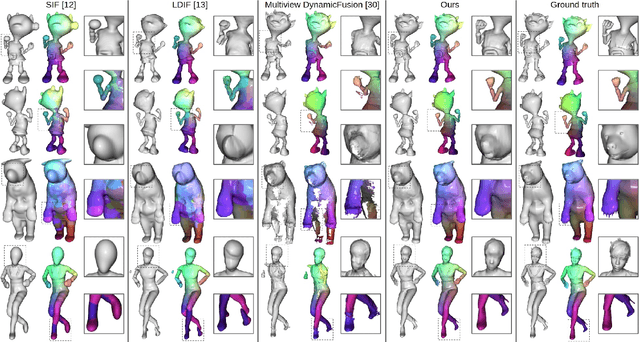
We introduce Neural Deformation Graphs for globally-consistent deformation tracking and 3D reconstruction of non-rigid objects. Specifically, we implicitly model a deformation graph via a deep neural network. This neural deformation graph does not rely on any object-specific structure and, thus, can be applied to general non-rigid deformation tracking. Our method globally optimizes this neural graph on a given sequence of depth camera observations of a non-rigidly moving object. Based on explicit viewpoint consistency as well as inter-frame graph and surface consistency constraints, the underlying network is trained in a self-supervised fashion. We additionally optimize for the geometry of the object with an implicit deformable multi-MLP shape representation. Our approach does not assume sequential input data, thus enabling robust tracking of fast motions or even temporally disconnected recordings. Our experiments demonstrate that our Neural Deformation Graphs outperform state-of-the-art non-rigid reconstruction approaches both qualitatively and quantitatively, with 64% improved reconstruction and 62% improved deformation tracking performance.
Neural Non-Rigid Tracking
Jun 23, 2020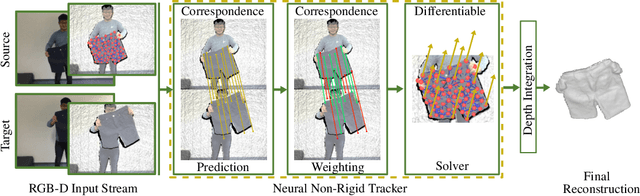
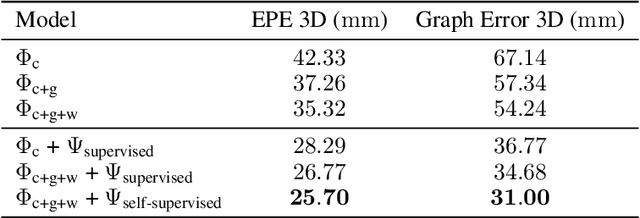
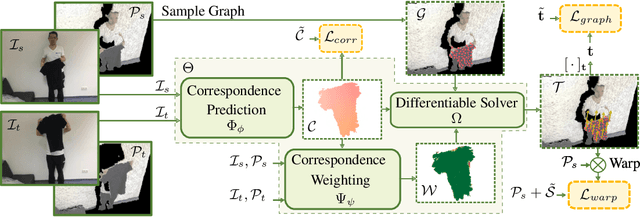
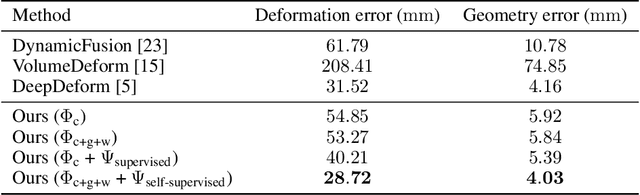
We introduce a novel, end-to-end learnable, differentiable non-rigid tracker that enables state-of-the-art non-rigid reconstruction. Given two input RGB-D frames of a non-rigidly moving object, we employ a convolutional neural network to predict dense correspondences. These correspondences are used as constraints in an as-rigid-as-possible (ARAP) optimization problem. By enabling gradient back-propagation through the non-rigid optimization solver, we are able to learn correspondences in an end-to-end manner such that they are optimal for the task of non-rigid tracking. Furthermore, this formulation allows for learning correspondence weights in a self-supervised manner. Thus, outliers and wrong correspondences are down-weighted to enable robust tracking. Compared to state-of-the-art approaches, our algorithm shows improved reconstruction performance, while simultaneously achieving 85 times faster correspondence prediction than comparable deep-learning based methods.