 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Domains to Instances: Dual-Granularity Data Synthesis for LLM Unlearning
Jan 07, 2026Although machine unlearning is essential for removing private, harmful, or copyrighted content from LLMs, current benchmarks often fail to faithfully represent the true "forgetting scope" learned by the model. We formalize two distinct unlearning granularities, domain-level and instance-level, and propose BiForget, an automated framework for synthesizing high-quality forget sets. Unlike prior work relying on external generators, BiForget exploits the target model per se to elicit data that matches its internal knowledge distribution through seed-guided and adversarial prompting. Our experiments across diverse benchmarks show that it achieves a superior balance of relevance, diversity, and efficiency. Quantitatively, in the Harry Potter domain, it improves relevance by ${\sim}20$ and diversity by ${\sim}$0.05 while halving the total data size compared to SOTAs. Ultimately, it facilitates more robust forgetting and better utility preservation, providing a more rigorous foundation for evaluating LLM unlearning.
M-Net: MRI Brain Tumor Sequential Segmentation Network via Mesh-Cast
Jul 28, 2025MRI tumor segmentation remains a critical challenge in medical imaging, where volumetric analysis faces unique computational demands due to the complexity of 3D data. The spatially sequential arrangement of adjacent MRI slices provides valuable information that enhances segmentation continuity and accuracy, yet this characteristic remains underutilized in many existing models. The spatial correlations between adjacent MRI slices can be regarded as "temporal-like" data, similar to frame sequences in video segmentation tasks. To bridge this gap, we propose M-Net, a flexible framework specifically designed for sequential image segmentation. M-Net introduces the novel Mesh-Cast mechanism, which seamlessly integrates arbitrary sequential models into the processing of both channel and temporal information, thereby systematically capturing the inherent "temporal-like" spatial correlations between MRI slices. Additionally, we define an MRI sequential input pattern and design a Two-Phase Sequential (TPS) training strategy, which first focuses on learning common patterns across sequences before refining slice-specific feature extraction. This approach leverages temporal modeling techniques to preserve volumetric contextual information while avoiding the high computational cost of full 3D convolutions, thereby enhancing the generalizability and robustness of M-Net in sequential segmentation tasks. Experiments on the BraTS2019 and BraTS2023 datasets demonstrate that M-Net outperforms existing methods across all key metrics, establishing itself as a robust solution for temporally-aware MRI tumor segmentation.
Dual-Modal Prototype Joint Learning for Compositional Zero-Shot Learning
Jan 23, 2025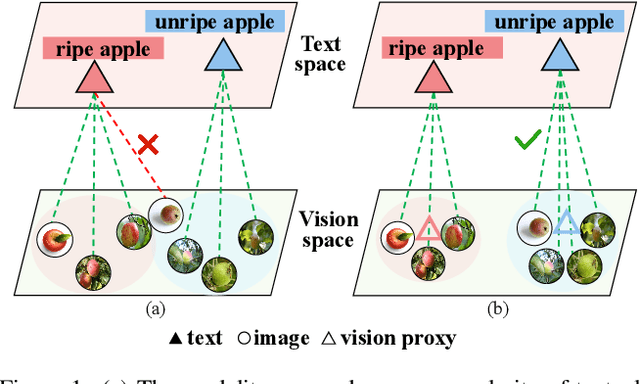

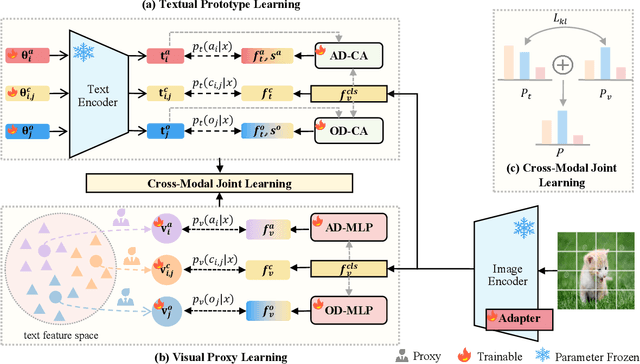
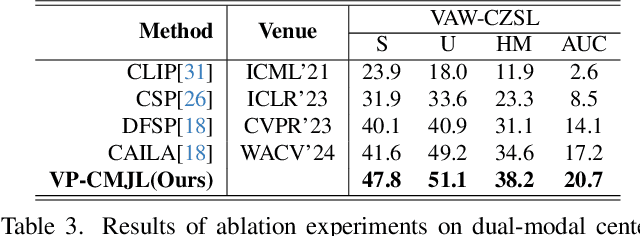
Compositional Zero-Shot Learning (CZSL) aims to recognize novel compositions of attributes and objects by leveraging knowledge learned from seen compositions. Recent approaches have explored the use of Vision-Language Models (VLMs) to align textual and visual modalities. These methods typically employ prompt engineering, parameter-tuning, and modality fusion to generate rich textual prototypes that serve as class prototypes for CZSL. However, the modality gap results in textual prototypes being unable to fully capture the optimal representations of all class prototypes, particularly those with fine-grained features, which can be directly obtained from the visual modality. In this paper, we propose a novel Dual-Modal Prototype Joint Learning framework for the CZSL task. Our approach, based on VLMs, introduces prototypes in both the textual and visual modalities. The textual prototype is optimized to capture broad conceptual information, aiding the model's generalization across unseen compositions. Meanwhile, the visual prototype is used to mitigate the classification errors caused by the modality gap and capture fine-grained details to distinguish images with similar appearances. To effectively optimize these prototypes, we design specialized decomposition modules and a joint learning strategy that enrich the features from both modalities. These prototypes not only capture key category information during training but also serve as crucial reference targets during inference. Experimental results demonstrate that our approach achieves state-of-the-art performance in the closed-world setting and competitive performance in the open-world setting across three publicly available CZSL benchmarks. These findings validate the effectiveness of our method in advancing compositional generalization.
Fuzzy Logic Guided Reward Function Variation: An Oracle for Testing Reinforcement Learning Programs
Jun 28, 2024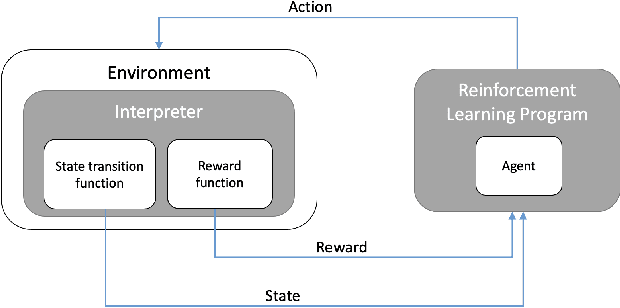
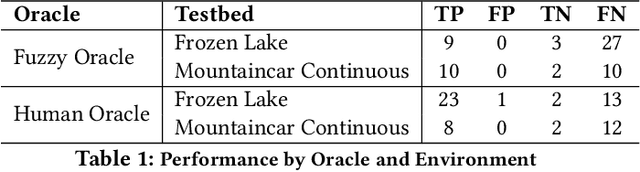
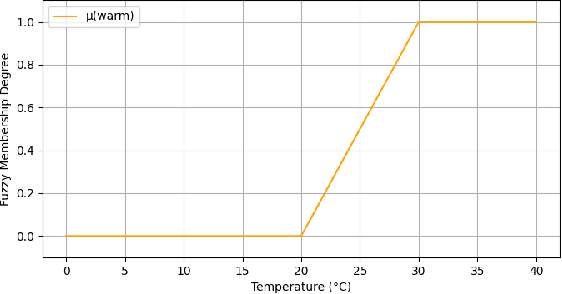
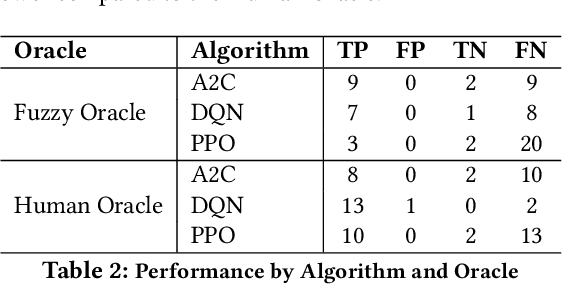
Reinforcement Learning (RL) has gained significant attention across various domains. However, the increasing complexity of RL programs presents testing challenges, particularly the oracle problem: defining the correctness of the RL program. Conventional human oracles struggle to cope with the complexity, leading to inefficiencies and potential unreliability in RL testing. To alleviate this problem, we propose an automated oracle approach that leverages RL properties using fuzzy logic. Our oracle quantifies an agent's behavioral compliance with reward policies and analyzes its trend over training episodes. It labels an RL program as "Buggy" if the compliance trend violates expectations derived from RL characteristics. We evaluate our oracle on RL programs with varying complexities and compare it with human oracles. Results show that while human oracles perform well in simpler testing scenarios, our fuzzy oracle demonstrates superior performance in complex environments. The proposed approach shows promise in addressing the oracle problem for RL testing, particularly in complex cases where manual testing falls short. It offers a potential solution to improve the efficiency, reliability, and scalability of RL program testing. This research takes a step towards automated testing of RL programs and highlights the potential of fuzzy logic-based oracles in tackling the oracle problem.
Explore the difficulty of words and its influential attributes based on the Wordle game
May 03, 2023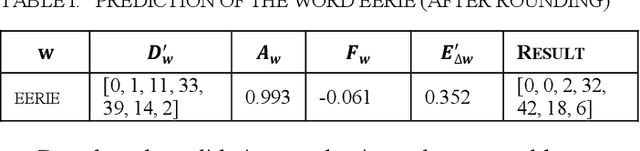

We adopt the distribution and expectation of guessing times in game Wordle as metrics to predict the difficulty of words and explore their influence factors. In order to predictthe difficulty distribution, we use Monte Carlo to simulate the guessing process of players and then narrow the gap between raw and actual distribution of guessing times for each word with Markov which generates the associativity of words. Afterwards, we take advantage of lasso regression to predict the deviation of guessing times expectation and quadratic programming to obtain the correction of the original distribution.To predict the difficulty levels, we first use hierarchical clustering to classify the difficulty levels based on the expectation of guessing times. Afterwards we downscale the variables of lexical attributes based on factor analysis. Significant factors include the number of neighboring words, letter similarity, sub-string similarity, and word frequency. Finally, we build the relationship between lexical attributes and difficulty levels through ordered logistic regression.
See Your Heart: Psychological states Interpretation through Visual Creations
Feb 11, 2023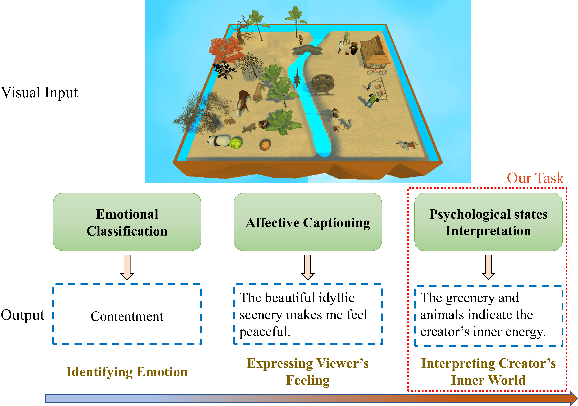

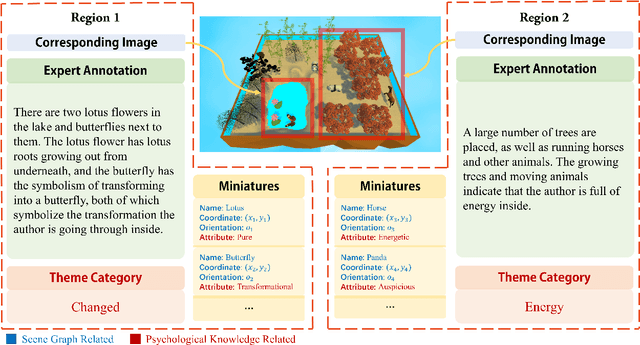

In psychoanalysis, generating interpretations to one's psychological state through visual creations is facing significant demands. The two main tasks of existing studies in the field of computer vision, sentiment/emotion classification and affective captioning, can hardly satisfy the requirement of psychological interpreting. To meet the demands for psychoanalysis, we introduce a challenging task, \textbf{V}isual \textbf{E}motion \textbf{I}nterpretation \textbf{T}ask (VEIT). VEIT requires AI to generate reasonable interpretations of creator's psychological state through visual creations. To support the task, we present a multimodal dataset termed SpyIn (\textbf{S}and\textbf{p}la\textbf{y} \textbf{In}terpretation Dataset), which is psychological theory supported and professional annotated. Dataset analysis illustrates that SpyIn is not only able to support VEIT, but also more challenging compared with other captioning datasets. Building on SpyIn, we conduct experiments of several image captioning method, and propose a visual-semantic combined model which obtains a SOTA result on SpyIn. The results indicate that VEIT is a more challenging task requiring scene graph information and psychological knowledge. Our work also show a promise for AI to analyze and explain inner world of humanity through visual creations.
TENET: Transformer Encoding Network for Effective Temporal Flow on Motion Prediction
Jun 30, 2022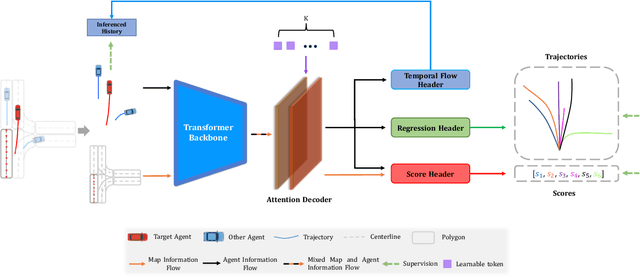

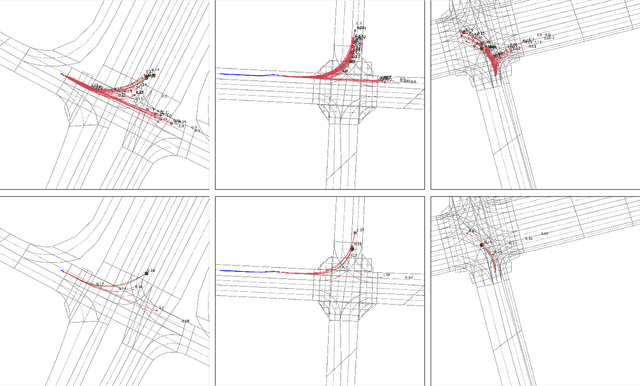
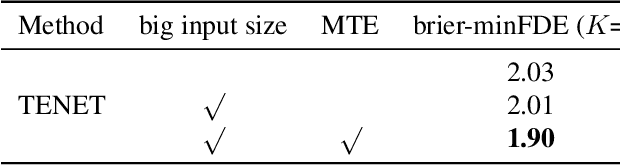
This technical report presents an effective method for motion prediction in autonomous driving. We develop a Transformer-based method for input encoding and trajectory prediction. Besides, we propose the Temporal Flow Header to enhance the trajectory encoding. In the end, an efficient K-means ensemble method is used. Using our Transformer network and ensemble method, we win the first place of Argoverse 2 Motion Forecasting Challenge with the state-of-the-art brier-minFDE score of 1.90.
Ensemble learning priors unfolding for scalable Snapshot Compressive Sensing
Jan 25, 2022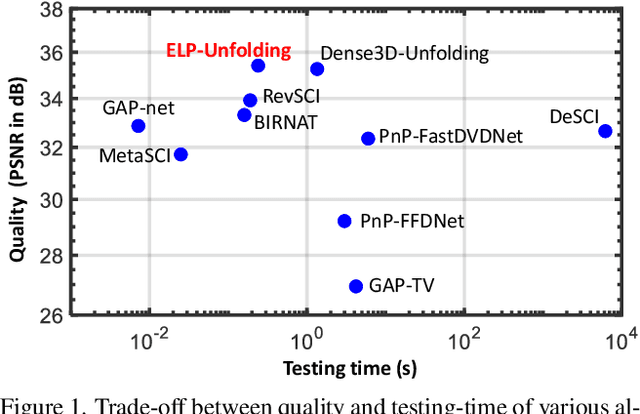
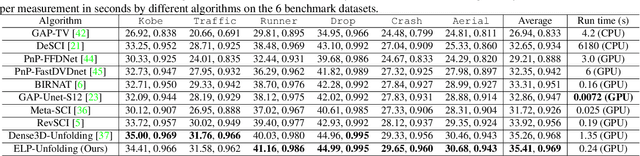
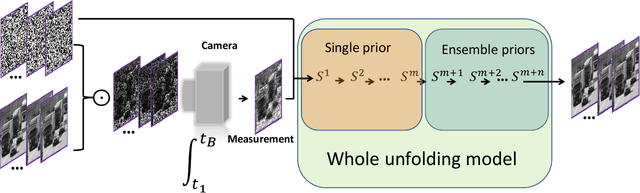
Snapshot compressive imaging (SCI) can record the 3D information by a 2D measurement and from this 2D measurement to reconstruct the original 3D information by reconstruction algorithm. As we can see, the reconstruction algorithm plays a vital role in SCI. Recently, deep learning algorithm show its outstanding ability, outperforming the traditional algorithm. Therefore, to improve deep learning algorithm reconstruction accuracy is an inevitable topic for SCI. Besides, deep learning algorithms are usually limited by scalability, and a well trained model in general can not be applied to new systems if lacking the new training process. To address these problems, we develop the ensemble learning priors to further improve the reconstruction accuracy and propose the scalable learning to empower deep learning the scalability just like the traditional algorithm. What's more, our algorithm has achieved the state-of-the-art results, outperforming existing algorithms. Extensive results on both simulation and real datasets demonstrate the superiority of our proposed algorithm. The code and models will be released to the public.
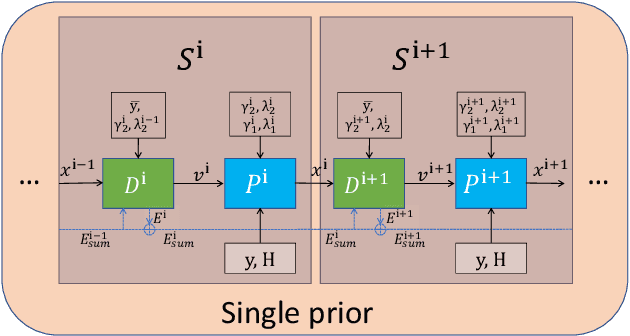
DetectorNet: Transformer-enhanced Spatial Temporal Graph Neural Network for Traffic Prediction
Oct 19, 2021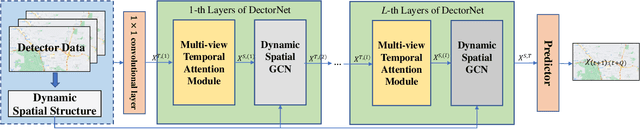

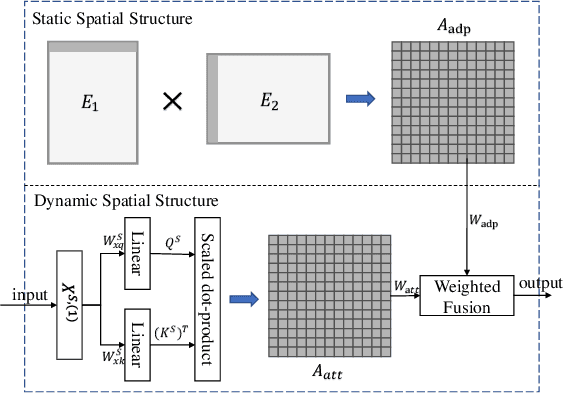
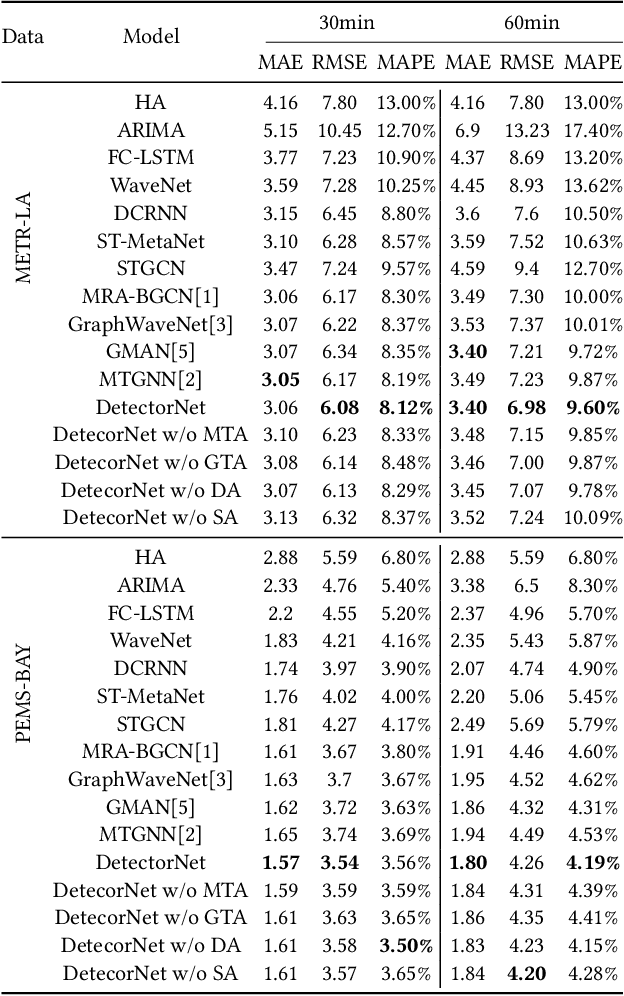
Detectors with high coverage have direct and far-reaching benefits for road users in route planning and avoiding traffic congestion, but utilizing these data presents unique challenges including: the dynamic temporal correlation, and the dynamic spatial correlation caused by changes in road conditions. Although the existing work considers the significance of modeling with spatial-temporal correlation, what it has learned is still a static road network structure, which cannot reflect the dynamic changes of roads, and eventually loses much valuable potential information. To address these challenges, we propose DetectorNet enhanced by Transformer. Differs from previous studies, our model contains a Multi-view Temporal Attention module and a Dynamic Attention module, which focus on the long-distance and short-distance temporal correlation, and dynamic spatial correlation by dynamically updating the learned knowledge respectively, so as to make accurate prediction. In addition, the experimental results on two public datasets and the comparison results of four ablation experiments proves that the performance of DetectorNet is better than the eleven advanced baselines.
Continuous Trajectory Planning Based on Learning Optimization in High Dimensional Input Space for Serial Manipulators
Dec 18, 2018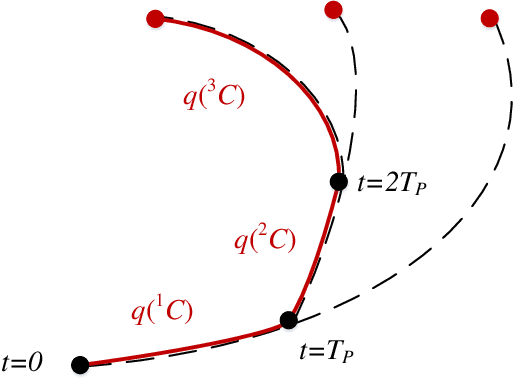
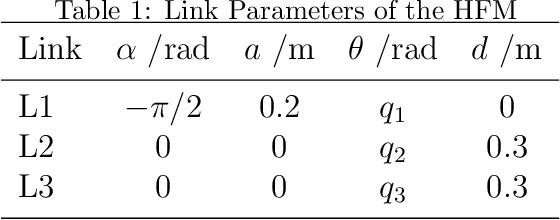
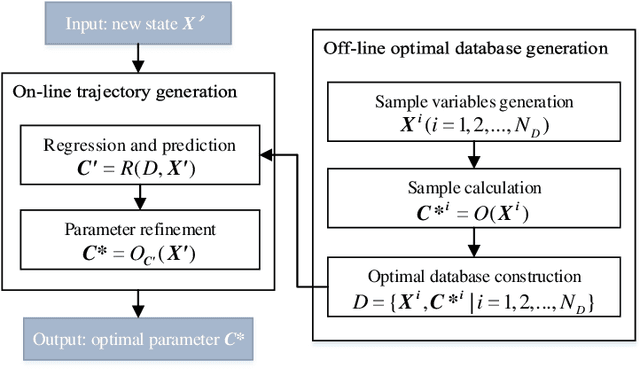

To continuously generate trajectories for serial manipulators with high dimensional degrees of freedom (DOF) in the dynamic environment, a real-time optimal trajectory generation method based on machine learning aiming at high dimensional inputs is presented in this paper. First, a learning optimization (LO) framework is established, and implementations with different sub-methods are discussed. Additionally, multiple criteria are defined to evaluate the performance of LO models. Furthermore, aiming at high dimensional inputs, a database generation method based on input space dimension-reducing mapping is proposed. At last, this method is validated on motion planning for haptic feedback manipulators (HFM) in virtual reality systems. Results show that the input space dimension-reducing method can significantly elevate the efficiency and quality of database generation and consequently improve the performance of the LO. Moreover, using this LO method, real-time trajectory generation with high dimensional inputs can be achieved, which lays a foundation for continuous trajectory planning for high-DOF-robots in complex environments.