Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTENET: Transformer Encoding Network for Effective Temporal Flow on Motion Prediction
Paper and Code
Jun 30, 2022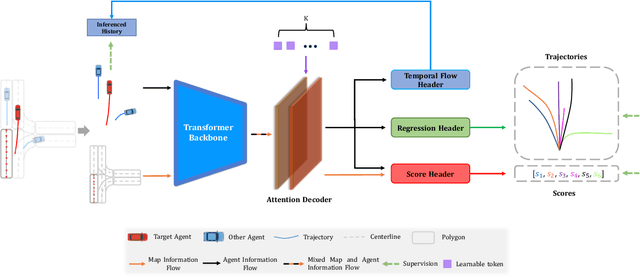

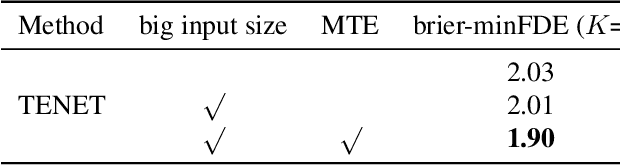
This technical report presents an effective method for motion prediction in autonomous driving. We develop a Transformer-based method for input encoding and trajectory prediction. Besides, we propose the Temporal Flow Header to enhance the trajectory encoding. In the end, an efficient K-means ensemble method is used. Using our Transformer network and ensemble method, we win the first place of Argoverse 2 Motion Forecasting Challenge with the state-of-the-art brier-minFDE score of 1.90.
View paper on